Общая задача синтеза объекта управления
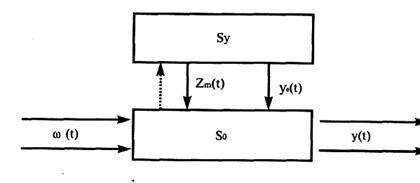
Объект процесса управления — это производственно-экономическая система So = {T, Z, W, U, Y, j, h]} со сложившейся производственной структурой GY и сложившимися тенденциями развития dY(t)/dt, d2Y(t)/dt2. Конечные результаты работы системы характеризуются множеством Y={Yi} взаимнокоррелированных величин. В общем случае yÎ Y — это функция времени, траектория или набор траекторий: у =f(x, j, t). Управляющая система Sy (или внешняя среда) формулирует цель управления y0 и множество допустимых управляющих воздействий Zm (рис. 4.1).
|
Рис. 4.1. Схема задачи синтеза объекта управления
При генерировании управляющей системой цели у0(t) и вектора управляющих сигналов Zm(t) за счет этих воздействий и факторов внешней среды w(t) объект управления So приобретает траекторию y(t). В общем случае эта траектория отличается от целевой траектории у0(t). Возникает Dу — разрыв между фактическим значением показателя у и его целевой траекторией у0: Dу =у — у0 (рис. 4.2) — так называемая проблема Dу.
Решить проблему Dу можно, во-первых, непосредственно — путем управляющего воздействия Zm и, во-вторых, косвенным путем — варьируя показатели уi, с которыми коррелирует у, или применяя оба способа одновременно.
Таким образом, проблема Dу есть сумма соответствующих подпроблем: Dу = Dну + Dку.
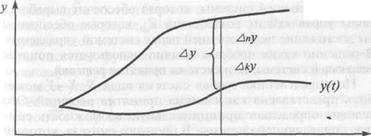 |
 Рис. 4.2. Компоненты вариации целевой траектории
Рис. 4.2. Компоненты вариации целевой траектории
С первым направлением связана задача синтеза управляющей системы, генерирующей управляющие воздействия Zm.
Что касается второго аспекта, то здесь необходимо заметить следующее.
Из множества свойств системы управления TхUхY выделяют подмножество Soy, называемое целевым множеством (по выходу) с элементами Soyj, с которыми связаны целевые изменения Dуi, такие, что
где ai— коэффициенты относительной важности подпроблем Dуi.
Тогда может быть поставлена задача синтеза проблемной ситуации {Soy, Dуi}, или синтеза целевого множества {Soy} и синтеза множества подпроблем {Dуi}.
При синтезе целевого множества исходят из принятой концепции объекта управления, с другой стороны — осуществляется выбор основной аналитической модели взаимосвязи показателей уi, с целевыми показателями у. В дальнейшем выявляется совместное влияние вариаций {Dуi} на уровень целевого показателя. Здесь учитывается взаимная связь между проблемами, поскольку развитие объекта управления должно быть комплексным. Для решения подпроблем можно, в зависимости от концепции объекта управления, использовать различные методы регулирования (стабилизации, выполнения программы или слежения). При этом вид возмущений w(t) идентифицировать не обязательно. Однако, недостаток регулирования, например, по сравнению с жестким управлением (управление без обратной связи), состоит в том, что регулятор воздействует на процесс только тогда, когда рассогласование Dу уже возникло. Когда регулируемых параметров несколько, используется несколько контуров регулирования и разрабатывается система многосвязного регулирования. Когда объекты регулирования взаимосвязаны, изменение установки регулятора воздействует не только на регулируемый параметр, но и может оказать воздействие через звенья связи на все другие регулируемые параметры. Вследствие интенсивного взаимодействия элементов возможно ухудшение качества регулирования. Эффективным методом моделирования и имитации сложных экономических систем, отличающихся нелинейными и сильно разветвленными структурами контуров обратной связи, является метод системной динамики Дж. Форрестера.
Однако создание адекватных моделей сложных управляемых объектов возможно только комбинацией методов системной динамики с современными методами идентификации, применяемыми в теории регулирования, а также методами эконометрии и теории принятия решений.