ВИНТОВОЙ ПОДЪЕМНЫЙ МЕХАНИЗМ
Механизм вертикальной наводки, имеющий в числе звеньев винтовую пару, называется винтовым подъемным механизмом. Схема такого механизма представлена на рис.7.6. Такие механизмы отличаются простотой конструкции и малой чувствительностью к условиям работы, однако обеспечивают небольшой сектор вертикальной наводки, поэтому они находят применение в пулеметных станках, а также в противотанковых гранатометах и безоткатных орудиях, где достаточен малый сектор вертикального обстрела.
Нарезка винта обычно прямоугольного или трапециидального сечения. Для обеспечения самоторможения передачи угол подъема винтовой линии принимается в пределах 4...6°. Расчетная схема винтового подъемного механизма приведена на рис.7.7.
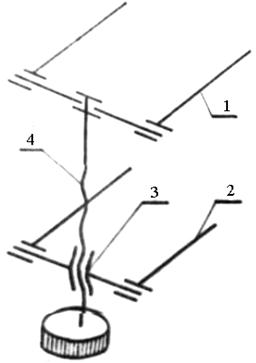
Pиc. 7.6. Винтовой подъемный механизм:
1 - люлька; 2 - основание люльки; 3 - маточная гайка; 4 - винт.
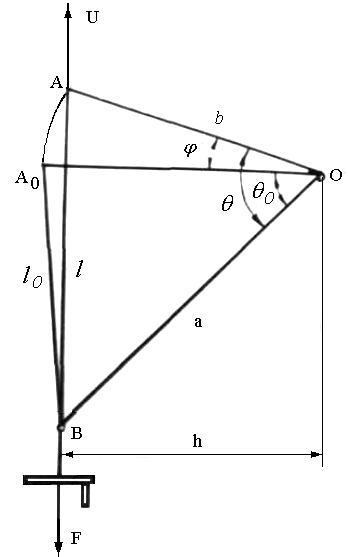
Pиc. 7.7. Расчетная схема бинтового подъемного механизма.
На этой схеме обозначено:
 - центр цапф;
- центр цапф;
 - центр шарнира маточной гайки;
- центр шарнира маточной гайки;
 - центр шарнира, связывающего подъемный винт с качающейся частью;
- центр шарнира, связывающего подъемный винт с качающейся частью;
 - расстояние между точками и ;
- расстояние между точками и ;
 - расстояние между точками и (а и b величины постоянные);
- расстояние между точками и (а и b величины постоянные);
l - рабочая длина винта в данный момент (величина переменная);
U - реакция винта при выстреле;
h - плечо реакции U относительно оси цапф;
 и
и  - соответственно угол между отрезками а и b при данном угле возвышения φ и при φ = 0.
- соответственно угол между отрезками а и b при данном угле возвышения φ и при φ = 0.
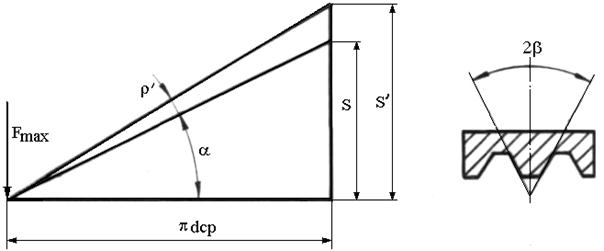
Pиc. 7.8. К определению усилия на маховике винтового механизма.
Формула для расчета реакции U, действующей на качающуюся часть при выстреле будет иметь вид
 , (7.30)
, (7.30)
Найдем зависимость для передаточного числа такого механизма
 (7.31)
(7.31)
где  - угловая скорость вращения маховика;
- угловая скорость вращения маховика;
 - угловая скорость вертикальной наводки.
- угловая скорость вертикальной наводки.
Рабочая длина винта
 . (7.32)
. (7.32)
Пусть за время от  качающаяся часть повернется на угол
качающаяся часть повернется на угол  , а рабочая длина винта изменится на
, а рабочая длина винта изменится на  , тогда дифференцируя (7.32) по переменной , получим
, тогда дифференцируя (7.32) по переменной , получим
 . (7.33)
. (7.33)
С другой стороны, из кинематических соображений
 , (7.34)
, (7.34)
где S - шаг нарезки винта;
п - число оборотов маховика в минуту.
Приравнивая (7.33) и (7.34) и решая полученное равенство относительно  , получим
, получим
 . (7.35)
. (7.35)
Тогда передаточное число механизма
 . (7.36)
. (7.36)
Как видно, передаточное число винтового механизма пропорционально углу θ, т.е. величина переменная, следовательно, применительно к данному механизму угловая скорость вертикальной наводки и усилие на маховике Рм также будут переменными. В этом заключается один из недостатков такого типа механизмов.
Непосредственно из рис. 7.7 следует, что
 , (7.37)
, (7.37)
тогда
 . (7.38)
. (7.38)
Последняя формула используется при графоаналитическом определении передаточного числа.
Максимальное значение передаточного числа
 , (7.39)
, (7.39)
что непосредственно следует из выражения (7.36).
Усилие Fmaх развиваемое в винтовом подъемном механизме при наводке, может быть определено по следующей приближенной зависимости
 , (7.40)
, (7.40)
где Jк - момент инерции качающейся части относительно цапф;
ωк - угловая скорость вращения качающейся части;
QK - вес качающейся части;
hmin - плечо силы Rmax относительно оси цапф;
f - коэффициент трения в цапфах;
r - радиус цапф.
Максимальное угловое ускорение  может быть определено по следующей приближенной зависимости
может быть определено по следующей приближенной зависимости
где  - угловое ускорение на маховике механизма;
- угловое ускорение на маховике механизма;
 - время разгона;
- время разгона;
п - число оборотов маховика в минуту в конце периода разгона.
Усилие на маховике винтового подъемного механизма для заполнения наводки определяется из следующих соображений. Представим развертку винтовой линии (рис. 7.8.), и пусть груз весом Fmax поднимается на высоту S', Тогда за один оборот маховика будет произведена работа
 ,
,
откуда усилие на маховике винтового механизма
 , (7.41)
, (7.41)
где rcp - средний радиус нарезки винта;
R - радиус рукоятки маховика;
 - угол подъема винтовой линии (по среднему диаметру нарезки винта);
- угол подъема винтовой линии (по среднему диаметру нарезки винта);
ρ’ - приведенный угол трения в нарезке винта (для трапециидальной нарезки)

где f - коэффициент трения между винтом и маточной гайкой;
β - половина угла профиля трапециидальной нарезки.
Для обеспечения самоторможения необходимо иметь
α < ρ’
при этом КПД  .
.