Влияние переотражений от местных предметов на погрешность определения пеленга.
Наличие переотражений от местных предметов приводит к образованию суммарного результирующего поля и как следствие к формированию фронта результирующей волны, положение которого отличается от положения фронта при отсутствии переотражений. Векторное суммирование показывает появление фазовой погрешности δсвязанной с появлением помехи:
δ = arctg
В результате фазовый угол суммарный ЭДС равен:
φ∑ = wt+Z∑
где Z∑ = mφ cos(Ωt-θC) + δто есть огибающая фазомодулированного суммарного
сигнала отличается при наличии помехи на величину δ, что и определяет погрешность пеленга Dθ.  Одним из достоинств фазового пеленгатора в сравнении с амплитудным, является значительно меньшая погрешность определения пеленга из-за переотражений.
Одним из достоинств фазового пеленгатора в сравнении с амплитудным, является значительно меньшая погрешность определения пеленга из-за переотражений.
Анализ в (5) конечного результата для погрешности пеленга, в случае если пеленги полезного сигнала θС и помехи θП , амплитуды помехи и сигнала находятся в соотношении  «1, а поляризация электромагнитных волн одинакова, ошибка пеленга равна:
«1, а поляризация электромагнитных волн одинакова, ошибка пеленга равна:
Dθ=
bП -дополнительный фазовый сдвиг помехи по отношению к сигналу равновероятен в пределах от 0 до 2π.
I1 –функция Бесселя первого порядка.
При постоянных qС, qП, bП, К и увеличении базы антенной системы (то есть r/λ) Dθуменьшается Рис 5.
Увеличение разноса антенной системы до r/λ = 0,75…1 снижает погрешность пеленга, обусловленную переотражением. Например при значениях К ≤ 0,2 Dθ≤10,при тех же условиях погрешность амплитудного пеленгатора достигает 100.
|
|
К= 0,5; bП = 00; θС –θП =900
Рис 5.
Колебательный характер объясняется зависимостью I1 от аргумента 4π

5. ПРИНЦИП РАБОТЫ И УСТРОЙСТВО АРП-75
Автоматические пеленгаторы представляют собой наземные РНУ, предназначенные для определения азимута ВС относительно точки установки АРП по сигналам бортовых ОВЧ (УКВ) связных радиостанций. Возможно использование АРП как самостоятельного РНУ, так и в качестве элемента системы посадки. АРП применяются также для опознавания ВС. С этой целью выходной сигнал АРП подается на ИКО ДРЛ. При этом на индикаторе появляется радиальная линия, ориентированная в направлении радиолокационной отметки ВС с которым в данный момент поддерживается связь.
АРП относится к классу квазидоплеровских пеленгаторов. Принцип работы доплеровского пеленгатора, заключается в приеме сигнала пеленгуемого передатчика на вращающую по окружности в горизонтальной плоскости ненаправленную антенну.
|
|



 В результате вращения антенны возникает эффект Доплера и принимаемый сигнал окажется фазомодулированным.
В результате вращения антенны возникает эффект Доплера и принимаемый сигнал окажется фазомодулированным.


 Фаза сигнала модуляции содержит информацию о пеленге.
Фаза сигнала модуляции содержит информацию о пеленге.
|

|
 В АРП происходит последовательное выделение и определение начальной фазы первой гармоники фазомодулированного сигнала, начальная фаза которой определяет
В АРП происходит последовательное выделение и определение начальной фазы первой гармоники фазомодулированного сигнала, начальная фаза которой определяет
Рис.4. Фаза ЭДС в неподвижной антенне (центральном вибраторе) φ0 = w0t = 2πf0t,
Фаза ЭДС в антенне вращающейся по окружности отличается от φ0 на величину
Δφ =  R
R cos(Ωt -
cos(Ωt - )
)
5.1. Принцип работы радиопеленгатора заключается в приеме сигнала пеленгуемого передатчика на вращающуюся (коммутируемую) по окружности в горизонтальной плоскости антенну (симметричный полуволновой вибратор). Схематично антенна показана на рис. 4, где R – радиус окружности,  – частота вращения.
– частота вращения.
В результате вращения антенны возникает эффект Доплера и на принимаемый сигнал налагается фазовая (частотная) модуляция. Эффект Доплера состоит в том, что относительное перемещение приемника и передатчика приводит к изменению частоты (а, следовательно, и фазы) принимаемого сигнала. В устройстве преобразования информации АРП происходит последовательное выделение налагаемого вращающейся антенной закона фазовой модуляции и определение начальной фазы первой гармоники этого закона, т.к. начальная фаза соответствует пеленгу на радиопередатчик.
Фаза ЭДС, наводимой в неподвижной антенне, расположенной в центре окружности (рис. 4, точка О), равна:

где  – частота принимаемого сигнала.
– частота принимаемого сигнала.
Фаза ЭДС в антенне, вращающейся по окружности радиуса R с частотой , отличается от  на величину:
на величину:

где  - пеленг передатчика;
- пеленг передатчика;
 - текущее значение азимута вращающейся антенны;
- текущее значение азимута вращающейся антенны;
 - длина волны принимаемого сигнала.
- длина волны принимаемого сигнала.
При этом мгновенное значение ЭДС в антенне:
 ,
,
т.е. ЭДС в антенне модулирована по фазе частотой , причем начальная фаза модулирующего колебания соответствует пеленгу передатчика.
Величина  называется индексом фазовой модуляции и характеризует максимальное значение отклонения фазы относительно , происходящего при вращении антенны.
называется индексом фазовой модуляции и характеризует максимальное значение отклонения фазы относительно , происходящего при вращении антенны.
Если принятые колебания усилить, подать на фазовый демодулятор и отфильтровать, то на выходе НЧ фильтра сигнал содержит информацию о пеленге (рис. 5):

Для определения пеленга необходимо сравнить напряжение  с опорным напряжением той же частоты:
с опорным напряжением той же частоты:

Фаза  равна нулю в моменты прохождения вращающейся антенной северного направления. Показания индикатора пеленга соответствуют разности фаз и , т.е. пеленгу.
равна нулю в моменты прохождения вращающейся антенной северного направления. Показания индикатора пеленга соответствуют разности фаз и , т.е. пеленгу.
На практике вместо вращающихся антенн применяются системы расположенных по окружности неподвижных вибраторов, которые с помощью коммутатора последовательно подключаются ко входу приемника. Такой радиопеленгатор называют квазидоплеровским.
Схема электрическая структурная автоматического квазидоплеровского УКВ радиопеленгатора Е-523 (Е-518) приведена на рис.6.
Сигнал, принимаемый антенной системой, модулируется в кольцевой антенной решетке, представляющей собой 16 симметричных вертикальных вибраторов.
Вращение одного вибратора по окружности имитируется последовательным переключением 16 вибраторов с частотой переключения  Гц.
Гц.
Переключение вибраторов осуществляется с помощью электронного коммутатора и выключателей, управляемых прямоугольными импульсами, которые формируются в аппаратуре управления и контроля. Фазомодулированный сигнал подается на модулятор, где смешивается с опорным гармоническим колебанием стабильной частоты  Гц и гармоническим сигналом, принятым центральным вибратором.
Гц и гармоническим сигналом, принятым центральным вибратором.
Опорное напряжение формируется в аппаратуре управления и контроля. На выходе модулятора присутствуют два сигнала: сигнал с центрального вибратора частоты и фазомодулированный сигнал с кольцевой антенной решетки частоты  . С выхода модулятора суммарный сигнал подается на усилитель - распределитель, с помощью которого осуществляется подключение входного сигнала одновременно к радиоприемным устройствам всех каналов. Каналы работают идентично.
. С выхода модулятора суммарный сигнал подается на усилитель - распределитель, с помощью которого осуществляется подключение входного сигнала одновременно к радиоприемным устройствам всех каналов. Каналы работают идентично.
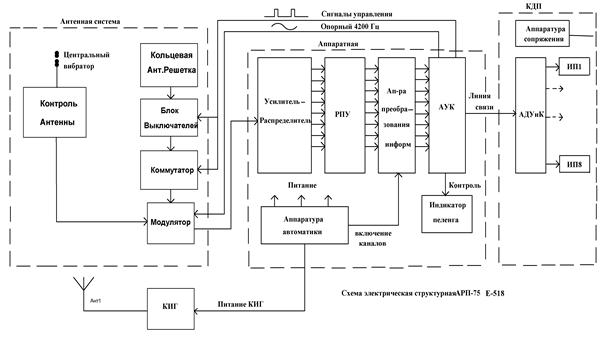
Рис. 6
В радиоприемном устройстве происходит усиление и перемножение сигналов-слагаемых на амплитудном детекторе. При этом выделяется фазомодулированный сигнал частоты 4200 Гц.
Дальнейшая обработка сигнала происходит в аппаратуре преобразования информации, на выходе которой формируются постоянные напряжения, пропорциональные синусу и косинусу пеленга-передатчика.
При появлении на входе индикатора этих напряжений его стрелка поворачивается на угол, соответствующий пеленгу.
АРП может работать в местном и дистанционном режиме.
При работе в дистанционном режиме пеленгационные сигналы и сигналы управления и контроля, вырабатываемые системой управления и контроля, по линии связи длиной до 10 км передаются на КДП. Через аппаратуру дистанционного управления и контроля шкафа КДП пеленгационные сигналы подаются:
- на индикаторы пеленга, установленные на рабочих местах операторов;
- на аппаратуру сопряжения с РЛС.
Транслируемые сигналы управления и контроля индицируются на световом табло. Для работ по настройке и проверке аппаратуры аппаратной АРП предусмотрен местный режим работы. В этом случае управление АРП осуществляется только из аппаратной, а контроль ведется с помощью индикатора пеленга, который может подключаться к любому каналу.
Для проверки работоспособности АРП при отсутствии основных пеленгуемых объектов служит антенна с контрольно-испытательным генератором (КИГ).
Более подробное описание взаимодействия функциональных узлов радиопеленгатора дано в описании функциональной схемы.
5.2.Схема электрическая функциональная АРП приведена на рис.7.
Антенна состоит из 16 симметричных полуволновых вибраторов Ан1-Ан16, расположенных по окружности диаметром 3,2 м, и несимметричного центрального вибратора Ан17. Антенна предназначена для приема сигналов пеленгуемых УКВ передатчиков и фазовой модуляции этих сигналов, вызываемой «эффектом Доплера» при «вращении» одного вибратора по окружности (п.5.1.).
Последовательное переключение симметричных вибраторов осуществляется с помощью электронных выключателей В1-В16 и трехсекционного коммутатора. Выключатели предназначены для уменьшения взаимного влияния симметричных вибраторов друг на друга при последовательной коммутации и работают синхронно с выходами коммутатора.
Трехсекционный коммутатор (ТЖ2.242.018Э3) состоит из двух секций на 8 направлений (ТЖ2.242.023 и ТЖ2.242.023-01) и одной секции на 2 направления (ТЖ2.242.024). Коммутатор ТЖ2.242.023 переключает четные вибраторы, а коммутатор ТЖ2.242.023-01 – нечетные вибраторы. Коммутатор ТЖ2.242.024 переключает обе секции на 8 направлений между собой.
Таким образом, происходит переключение 16 вибраторов. Управляющие импульсы формируются в генераторе опорных и управляющих напряжений (ГОУН), функционально входящем в шкаф общеканальной аппаратуры ТЖ2.009.085 (ТЖ2.009.085-01).
Форма импульсов показана на рис.54.
Коммутатором на 2 направления управляют импульсы «1» 1 разряд и «0» 1 разряд, а коммутаторами на 8 направлений импульсы 1-16 с дешифратора.
Фазомодулированный сигнал с высокочастотного выхода коммутатора подается на модулятор-усилитель однополосный ТЖ2.081.125. Одновременно сюда поступает немодулированный сигнал с несимметричного центрального вибратора и опорные сигналы «4200 Гц, 0º» и «4200 Гц 90º» с ГОУН. На выходе МУО присутствует сумма: сигнал с центрального вибратора и фазомодулированный сигнал несущей частоты, увеличенной на 4200 Гц, что необходимо для последующего переноса фазовой модуляции на стабильную частоту 4200 Гц.
В антенной системе предусмотрен встроенный контроль параметров, осуществляемый с помощью двух устройств: коммутатора контроля ТЖ2.242.021 и контрольного генератора антенны ТЖ2.210.023.
Коммутатор контроля подключает центральный вибратор к МУО в режиме РАБОТА и к контрольному генератору антенны в режиме КОНТРОЛЬ. Работа в режиме КОНТРОЛЬ описана в п.5.3.
Суммарный сигнал как в режиме РАБОТА, так и в режиме КОНТРОЛЬ с выхода МУО подается на усилитель-распределитель ТЖ2.030.037 (ТЖ2.030.038). В состав усилителя-распределителя (УР) входят два (три) УР ТЖ2.030.027, составляющих вместе пяти - (десяти) канальный УР. К каждому выходу усилителя-распределителя подключен приемник радиостанции «Баклан-5Ш», настроенный каждый на свою частоту  .
.
В амплитудном детекторе приемника происходит перемножение сигналов-слагаемых:  - с центрального вибратора и
- с центрального вибратора и  с кольцевой антенной решетки (после увеличения несущей частоты на величину
с кольцевой антенной решетки (после увеличения несущей частоты на величину  ), где
), где  и
и  - колебания амплитуды, образуемые вследствие наложения речевой модуляции и изрезанности амплитудной диаграммы направленности антенны. В результате перемножения и фильтрации на выходе радиостанции образуется фазомодулированное колебание с несущей частотой, равной :
- колебания амплитуды, образуемые вследствие наложения речевой модуляции и изрезанности амплитудной диаграммы направленности антенны. В результате перемножения и фильтрации на выходе радиостанции образуется фазомодулированное колебание с несущей частотой, равной :  .
.
Этот сигнал заводится в соответствующий канал преобразования информации о пеленге. Все каналы расположены в шкафу канальной аппаратуры и работают одинаково.
Сигнал о выходе радиостанции поступает на фильтр 4200 Гц ТЖ2.067.117, где освобождается от шумов и высших гармоник, и далее – на преобразователь фазовой модуляции в широтноимпульсную (ФМ-ШИМ) ТЖ3.211.026. Выходной сигнал преобразователя ФМ-ШИМ содержит на выходе гармонику частоты Ω=32,8 Гц, фаза которой соответствует азимуту на пеленгуемый передатчик. Этот сигнал через фильтр 32,8 Гц ТЖ2.067.144 подается на преобразователь фазы в амплитуду (Ф-А) ТЖ3.211.027, где преобразуется в два постоянных напряжения, одно из которых пропорционально косинусу пеленга (С-Ю), а другое – синусу пеленга (З-В). Кроме того, платой «ФМ-ШИМ» формируется сигнал НАЛИЧИЕ ПЕЛЕНГА для подключения индикаторных устройств, при наличии на выходе фильтра «4200Гц» пеленгуемого сигнала. Форма сигналов, получаемых в процессе преобразования информации, показана на схеме электрической функциональной (рис. 7). Опорные сигналы на преобразователи ФМ‑ШИМ и Ф-А заводятся с генератора опорных и управляющих напряжений (ГОУН).
Выходные сигналы каналов преобразования информации поступают в шкаф общеканальной аппаратуры (ШОА) параллельно на первый и второй комплекты исполнительного пункта системы телеуправления и телесигнализации (ТУ-ТС), с которых они подаются в линию связи для передачи на КДП. Исполнительный пункт осуществляет передачу сигналов и прием команд, которые в дистанционном режиме поступают с КДП (табл. 17.1 и 17.2). ГОУН выдает управляющие и опорные сигналы, необходимые для работы коммутатора, канала преобразования информации, модулятора-усилителя однополосного (рис.53).
При работе в дистанционном режиме сигналы С-Ю, З-В и наличие пеленга передаются по линии связи на шкаф КДП ТЖ2.157.025 (ТЖ2.157.025-01). Эти сигналы поступают параллельно на ДП ТУ-ТС1 или ДП ТУ-ТС2 шкафа КДП и далее, на индикаторы пеленга, установленные на рабочих местах операторов.
В шкафу КДП установлен индикатор пеленга, который используется для контроля и проверки любого канала.
Сигналы С-Ю и З-В заводятся параллельно на формирователи сигналов для РЛС ТЖ3.065.030. В формирователе постоянные напряжения С-Ю и З-В фильтруются от пульсации и наводок, преобразуются из напряжения, пропорциональных синусу и косинусу истинного азимута, в напряжения, пропорциональные синусу и косинусу магнитного азимута, т.е. производится «доворот» пеленга на магнитное склонение (от 0º до 20º), усиливаются и подаются на ИКО РЛС.
Питание аппаратной АРП осуществляется от сети 380В 50Гц двумя кабелями: основным и резервным. Элементы силовой коммутации и защиты размещены в шкафу автоматики ТЖ3.680.012 (ТЖ3.680.012-01). Там же находится схема автоматического перехода питания АРП с основного кабеля на резервный. Централизованный стабилизатор вырабатывает постоянное напряжение +27В, выпрямитель АГУЗ 215.000 вырабатывает напряжение минус 19В. С устройства управления и сигнализации выдаются команды на включение каналов, включение и отключение вентиляции и обогрева.
Выпрямитель +27В деж. Выдает дежурное напряжение +27В в аппаратную одновременно и независимо от централизованного стабилизатора. Устройство контроля напряжения автоматически переключает работающий комплект источников питания на резервный при изменении напряжения минус 19В более чем на ±10%.
Шкаф КДП и индикаторы пеленга, установленные в линейном аппаратном зале (ЛАЗ) КДП, подключаются к щитовой ЛАЗа.
В аппаратной установлены вспомогательные системы:
- автоматического обогрева и вентиляции;
- пожарной сигнализации;
- светомаскировки и охранной сигнализации;
- светоограждения.
Автоматические системы обогрева и вентиляции включаются и отключаются по сигналам термодатчиков.
Электрокамин включается при температуре ниже +10ºС и отключается при нагреве до 20ºС; вентиляция шкафов и общеобменная включается при температуре выше 35ºС и отключается при 30ºС.
При температуре воздуха аппаратной выше 70ºС отключается вся аппаратура аппаратной и на КДП выдается сигнал ПОЖАР.
При открывании любой из 2-х дверей кузова ПАУ-1 автоматически выдается сигнал на КДП ОХР. ЗОНА, гаснет основное освещение, при открывании входной двери загорается матовый светильник.
Системы пожарной сигнализации и светомаскировки выдают сигнал на КДП даже при отключенном питании аппаратной.
Система светоограждения выдает сигнал на автоматическое включение заградительных огней на мачте в темное время суток и их отключение в светлое время суток.
5.3.С целью обеспечения минимального времени поиска неисправностей и восстановления работоспособности аппаратуры в АРП реализована система непрерывного параметрического контроля, которая включается одновременно с пеленгатором и выдает информацию о его состоянии во время приема сигнала пеленга.
Кроме этого предусмотрена система периодического контроля антенны, обеспечивающая контроль антенны при регламентных работах и осмотрах изделия, а также при ремонте.
Автоматическая система непрерывного контроля производит контроль:
a) всех пеленгаторных каналов в четырех точках:
- выход сигнала НАЛИЧИЕ ПЕЛЕНГА с платы ФМ-ШИМ;
- выход фильтра 32,8 Гц;
- выходы платы Ф-А: сигнал С-Ю и З-В;
б) двадцати напряжений с ГОУНа;
- 18 сигналов коммутации вибраторов антенны;
- двух модулирующих напряжений в МУО;
в) источников питания – стабилизатора и выпрямителя 19В.
Контроль осуществляется как в местном, так и в дистанционном режиме. В дистанционном режиме сигналы аварии каналов, ГОУНа и комплекта питания поступают на индикаторное табло, расположенное в шкафу КДП.
В аппаратной контроль работоспособности осуществляется по табло НОРМА‑АВАРИЯ и лампам П1 и П2, расположенным на шкафу ОА, и, кроме того, загорается свето-диод, соответствующий параметру и номеру неисправного канала.
Контроль напряжений источников питания осуществляется линейкой контроля напряжения ТЖ5.159.003, контроль каналов и ГОУНа – пятью платами контроля ТЖ2.045.016.
Контроль антенны заключается в контроле сигналов с кольцевых вибраторов по амплитуде. Для этого центральный вибратор подключается коммутатором контроля антенны (при включении тумблера КОНТРОЛЬ АНТЕННЫ на ШОА). Сигнал с центрального вибратора принимается кольцевой антенной решеткой и через коммутатор подается на вход МУО одновременно с сигналом генератора контроля антенны. Проходя через усилитель-распределитель, сигнал с выхода МУО подается на радиостанцию 1-го канала. На выходе р/с 1-го канала сигнал имеет вид, показанный на рис.8а.
При неисправности какого-либо вибратора на осциллографе, подключенном к выходу р/с, будут видны соответствующие «провалы», рис.8б, а на световом табло в шкафу ОА высвечивается светодиод, соответствующий номеру неисправного вибратора.
Для обработки сигнала с р/с и определения номера неисправного вибратора служит плата контроля антенны ТЖ2.045.017.