Задання положення матеріальної точки в просторі
Для вивчення закономірностей руху матеріальної точки застосову-ють три способи задання положення цієї точки в просторі: векторний, координатний і природний (або натуральний). Рух матеріальної точки (а значить, і її положення у просторі в будь-який момент часу) вважається заданим, якщо відома залежність від часу радіуса – вектора або координат цієї точки при векторному й координатному способах задання, і траєкторія точки й закон руху при природному способі задання. Останній спосіб розглядається в курсі теоретичної механіки. У фізиці використовуються переважно перші два.
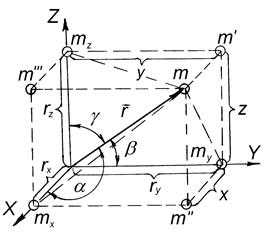
Рис. 2.1
Радіусом – вектором  деякої точки m (рис. 2.1) називають вектор, проведений із точки початку відліку (початку координат) у дану точку. Він однозначно визначає положення точки у просторі і вважається заданим, якщо відомі його довжина і напрямок (тобто модуль і кути α, β і γ).
деякої точки m (рис. 2.1) називають вектор, проведений із точки початку відліку (початку координат) у дану точку. Він однозначно визначає положення точки у просторі і вважається заданим, якщо відомі його довжина і напрямок (тобто модуль і кути α, β і γ).
На рис. 2.1 mx, my і mz - проекції точки m на координатні осі, rx, ry і rz – проекції радіуса-вектора  на координатні осі. Очевидно, що для рухомої точки радіус-вектор залежить від часу:
на координатні осі. Очевидно, що для рухомої точки радіус-вектор залежить від часу:  . Проекції радіуса-вектора на координатні осі називають декартовими координатами точки: rx = r cos α = x; ry = r cos β = y; rz = r cos γ = z. Оскільки радіус-вектор залежить від часу, то і координати точки m також є функцією часу. Таким чином, закон руху точки m може бути заданий системою рівнянь:
. Проекції радіуса-вектора на координатні осі називають декартовими координатами точки: rx = r cos α = x; ry = r cos β = y; rz = r cos γ = z. Оскільки радіус-вектор залежить від часу, то і координати точки m також є функцією часу. Таким чином, закон руху точки m може бути заданий системою рівнянь:
x = x (t), y = y (t), z = z (t), (2.1)
або еквівалентним їй рівнянням
 (2.2)
(2.2)
Їх називають кінематичними рівняннями руху матеріальної точки. Для системи n матеріальних точок (або тіл), кожна з яких має свою масу mi і радіус-вектор  , радіус-вектор центра інерції
, радіус-вектор центра інерції  визначається рівнянням:
визначається рівнянням:
 (2.3)
(2.3)
Координати центра інерції визначаються так само, як і координати матеріальної точки. Модуль радіуса-вектора  може бути виражений через координати на підставі теореми Піфагора:
може бути виражений через координати на підставі теореми Піфагора:
 (2.4)
(2.4)
а сам радіус-вектор – через координати точки і орти  ,
,  ,
,  ,
,
(або  ,
,  ,
,  ) координатних осей:
) координатних осей:
 (2.5)
(2.5)
Величини 

 (прийнято обидва ці позначення) називають ортами (або одиничними векторами) координатних осей. Мо-дуль кожного орта дорівнює одиниці в обраній системі одиниць, а його напрямок збігається з напрямком відповідної координатної осі.
(прийнято обидва ці позначення) називають ортами (або одиничними векторами) координатних осей. Мо-дуль кожного орта дорівнює одиниці в обраній системі одиниць, а його напрямок збігається з напрямком відповідної координатної осі.