Реверсування
Для реверсування трифазного асинхронного двигуна, тобто для зміни напряму обертання ротора, необхідно змінити напрям обертання магнітного поля статора. Це здійснюють зміною місць двох проводів, які живлять обмотку статора ( рис. 6.2 ).
 |
Рис. 6.2. Схеми вмикання трифазного асинхронного двигуна при реверсуванні.
Механічна характеристика
Це залежності моменту на валу двигуна від ковзання М(S) або частоти обертання ротора від моменту n(М).
На характеристиці ( рис. 6.3 ) позначені:
Мном , sном – номінальні момент та ковзання;
Мп – пусковий момент, коли s = 1;
Мmах – максимальний момент;
Sкр – критичне ковзання, яке відповідає максимальному моменту.
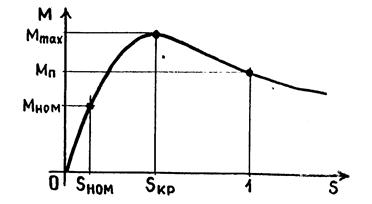 |
Рис. 6.3. Механічна характеристика трифазного асинхронного двигуна
з короткозамкненим ротором.
Номінальний момент та ковзання знаходять так:

де номінальна потужність  в кВт.
в кВт.
Пусковий та максимальний моменти визначають так:

де  – коефіцієнт максимального моменту,
– коефіцієнт максимального моменту,
 - коефіцієнт пускового моменту.
- коефіцієнт пускового моменту.
Ці коефіцієнти приводять у таблицях технічних характеристик двигунів.
Критичне ковзання можна знайти так:

 +
+ .
.
Рівняння механічної характеристики
 ,
,
де а – коефіцієнт, який залежить від відношення активних опорів обмоток ротора та статора.
Частіше користуються спрощеною формулою, яка добре описує робочу частину механічної характеристики для що S > 0 та S <
 .
.
Треба зауважити, що максимальний момент двигуна пропорційний напрузі в квадраті і не залежить від ковзання. Критичне ковзання залежить від активного опору кола ротора.
Робочі характеристики
Такі характеристики одержують експериментальним методом, якщо вимірювати електричні величини з боку обмотки статора, а механічні величини на валу двигуна ( рис. 8.4 ). Аналіз цих характеристик показує, що не треба експлуатувати двигун при малому навантаженні, оскільки будуть малі коефіцієнти потужності та корисної дії.

Рис. 6.4. Робочі характеристики трифазного асинхронного двигуна.
Регулювання швидкості
Швидкість асинхронного двигуна та частоту обертання визначають рівняннями
 ,
,  .
.
З цих рівнянь випливає три способи регулювання швидкості:
- зміною частоту живлення f, це плавне регулювання, його здійснюють за допомогою тиристорних перетворювачів частоти;
- змінюють кількість пар полюсів p, здійснюють у спеціальних багатошвидкісних двигунах, обмотка статора якого має окремі секції;
- змінюють ковзання s, здійснюють за допомогою додаткових резисторів RД в колі фазного ротора, тут будуть великі втрати електроенергії.