Лекция 4. Основы оптимальной обработки сигналов
Если на входе приемника действует сигнал x(t), равный сумме полезного сигнала  и помехи n(t) или только помехе, то оптимальный приемник в случае сигнала с полностью известными параметрами вычисляет так называемый корреляционный интеграл, а затем сравнивает его величину с порогом z0. Если помеха является гауссовским случайным процессом, спектральная плотность которого равномерна (белый шум), то корреляционный интеграл имеет вид
и помехи n(t) или только помехе, то оптимальный приемник в случае сигнала с полностью известными параметрами вычисляет так называемый корреляционный интеграл, а затем сравнивает его величину с порогом z0. Если помеха является гауссовским случайным процессом, спектральная плотность которого равномерна (белый шум), то корреляционный интеграл имеет вид
 (1.23)
(1.23)
Значение корреляционного интеграла (1.23) находится с помощью коррелятора (рис. 1.14) или согласованного фильтра (рис. 1.15). Основными элементами коррелятора, как следует выражения (1.23), являются перемножитель, генератор сигнала и интегратор. На перемножитель поступают входной сигнал 
сигнал u(t) от генератора сигнала. Произведение x(t)u(t) интегрируется с момента прихода (t=0) и до момента окончания обнаруживаемого сигнала (t=T). Отметим, что коррелятор является устройством с переменными параметрами, так как режим его работы зависит от изменения u(t) во времени. Поскольку операции
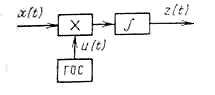
Рис. 1.14 Коррелятор
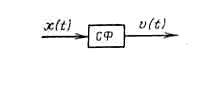
Рис. 1.15 Согласованный фильтр
умножения и интегрирования линейны, то коррелятор является линейным устройством. Имея в виду, что он отфильтровывает сигнал от помех и является линейным устройством с переменными параметрами, его иногда называют активным фильтром в отличие от пассивных фильтров, параметры которых постоянны во времени.
Согласованный фильтр является пассивным фильтром. Напряжение на выходе согласованного фильтра в момент окончания сигнала (t = T) с точностью до постоянного множителя а равно напряжению на выходе коррелятора
 (1.24)
(1.24)
Импульсная характеристика согласованного фильтра
 (1.25)
(1.25)
которая по форме является зеркально отображенным сигналом с запаздыванием Т.
Общим между коррелятором и согласованным фильтром является равенство (с точностью до постоянной) выходных напряжений в момент времени t=T. Это и определяет их взаимную эквивалентность с точки зрения обнаружения сигнала. Различие заключается в следующем. Коррелятор является устройством с переменными во времени параметрами, а согласованный фильтр — устройством с постоянными параметрами. Следствием этого является то, что согласованный фильтр инвариантен относительно задержки сигнала и его начальной фазы (насколько эти величины изменятся в сигнале на входе фильтра, настолько они изменятся и в сигнале па выходе), а коррелятор не инвариантен.
Если сигнал имеет несколько неизмеряемых или измеряемых случайных параметров, то структура оптимального приемника изменяется, по его основная часть остается прежней, так как всегда должен быть согласованный фильтр или коррелятор. Например, при случайной начальной фазе сигнала в приемнике с сог-ласованным фильтром за фильтром должен следовать детектор для выделения огибающей. В приемнике корреляционного типа должны быть второй (квадратурный) канал и схема выделения огибающей. Поэтому в оптимальном приемнике всегда есть согласованный фильтр или коррелятор.
Коэффициент передачи согласованного фильтра с импульсной характеристикой (1.25)
 (1.26)
(1.26)
где  - спектр сигнала, * — знак комплексной сопряженности. Из (1.26) следует выражение для амплитудно-частотной характеристики (АЧХ)
- спектр сигнала, * — знак комплексной сопряженности. Из (1.26) следует выражение для амплитудно-частотной характеристики (АЧХ)
 (1.27)
(1.27)
и для фазо-частотной характеристики (ФЧХ) согласованного фильтра
 (1.28)
(1.28)
Из (1.27) следует, что АЧХ согласованного фильтра повторяет спектральную плотность сигнала.
Исключительная роль согласованного фильтра (или коррелятора) в оптимальном приемнике объясняется тем, что он максимизирует отношение сигнал-помеха на своем выходе. Это отношение при действии на входе фильтра белого шума со спектральной плотностью No и сигнала с энергией Е не зависит от формы сигнала
 (1.29)
(1.29)
Проиллюстрируем более подробно корреляционный метод. Сущность корреляционного метода заключается в использовании различия сигнала и помехи. Данный метод эффективен лишь в случае приема периодических или квазипериодических сигналов.
Рассмотрим пример, когда полезный сигнал является периодическим, а помеха - типа белого гауссова шума.
В приемном устройстве определяется корреляционная функция поступающей на вход суммы полезного сигнала и помехи
 (1.30)
(1.30)
В полученном выражении  и
и  есть взаимные корреляционные функции сигнала и помехи, а
есть взаимные корреляционные функции сигнала и помехи, а  и
и  — авто-корреляционные функции сигнала и помехи соответственно.
— авто-корреляционные функции сигнала и помехи соответственно.
Поскольку передаваемый сигнал и помеха статистически независимы, то

следовательно, выражение (1.30) примет вид
 (1.31)
(1.31)
Из выражения (1.31) видно, что корреляционная функция смеси сигнала и помехи равна сумме автокорреляционных функций сигнала и помехи. Как известно, корреляционная функция периодического сигнала является периодической функцией аргумента. Функция с увеличением  стремится к нулю и при
стремится к нулю и при  практически равна нулю (рис.1.16). Следовательно, выбирая такое время , при котором значением можно пренебречь, мы обеспечим тем самым получение функции
практически равна нулю (рис.1.16). Следовательно, выбирая такое время , при котором значением можно пренебречь, мы обеспечим тем самым получение функции  , отображающей полезный сигнал, т. е. выде-ление полезного сигнала из смеси полезного сигнала с помехой.
, отображающей полезный сигнал, т. е. выде-ление полезного сигнала из смеси полезного сигнала с помехой.
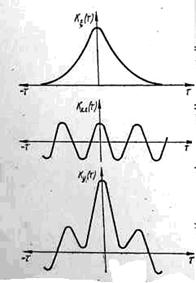
Рис.1.16 Вид корреляционных функций
Для уточнения того, от каких факторов зависит время, затрачиваемое для выделения полезного сигнала при корреляционном приеме, выразим корреляционные функции и через дисперсии и нормированные корреляционные функции  и
и 
 (1.32)
(1.32)
Подставляя (1.32) в (1.31), найдем
 (1.33)
(1.33)
Из (1.33),видно, что выбор времени приема зависит от интервала корреляции помехи  и отношения сигнал/помеха. Действительно, при
и отношения сигнал/помеха. Действительно, при  вторым членом можно пренебречь и для выделения полезного сигнала теоретически времени не потребуется. При необходимо увеличивать , чтобы получить
вторым членом можно пренебречь и для выделения полезного сигнала теоретически времени не потребуется. При необходимо увеличивать , чтобы получить . Следовательно, в последнем случае для выделения полезного сигнала необходимо дополнительное время, которое должно расти с увеличением отношения
. Следовательно, в последнем случае для выделения полезного сигнала необходимо дополнительное время, которое должно расти с увеличением отношения  и интервала корреляции помехи .
и интервала корреляции помехи .
Общее время, затрачиваемое на корреляционный прием, определяется не только , но и временем интегрирования Tl выбираемым достаточно большим. Практически ограничиваются значением
 .
.