рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Основы теории систем связи с подвижными объектами
Реферат Курсовая Конспект
Основы теории систем связи с подвижными объектами
Основы теории систем связи с подвижными объектами - раздел Философия, Министерсво Образования И Науки Российской Федерации Федеральное Аге...
МИНИСТЕРСВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
Технологический институт ФЕДЕРАЛЬНОГО ГОСУДАРСТВЕННОГО ОБРАЗОВАНИЯ
«ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
РАДИОТЕХНИЧЕСКИЙ ФАКУЛЬТЕТ
Горбенко Александр Петрович, старший преподаватель кафедры радиотехнических и телекоммуникационных систем
«Основы теории систем связи с подвижными объектами»
Семестровый курс лекций
Специальность 210402 «Средства связи с подвижными объектами»
Таганрог 2008
Аннотация
УДК 621.391
Приводятся основные понятия и определения систем связи с подвижными объектами. Рассмотрены вопросы формирования и представления сигналов, приводится классификация помех. Описано преобразование Фурье для одиночных и периодических сигналов. Обсуждаются основы оптимальной обработки сигналов. Для задач обнаружения, различения и фильтрации сигналов приводятся алгоритмы обработки, описаны основные критерии обнаружения и различения сигналов. Рассмотрены основы помехоустойчивого кодирования. Описаны некоторые виды кодов, в том числе и циклических, имеющих важное прикладное значение. Материал изложен на модульной основе с диагностико-квалиметрическим обеспечением.
Семестровый курс в первую очередь предназначен для изучения дисциплин «Основы теории систем связи с подвижными объектами» студентам специальности 210402 «Средства связи с подвижными объектами», но может быть использован и при изучении других дисциплин студентами радиотехнических специальностей. Структура курса построена таким образом, чтобы студенты могли самостоятельно овладеть теоретическим материалом данной дисциплины.
Оглавление
Введение. - 4 -
Модуль 1. Модели сигналов и помех. - 5 -
Представление и основы обработки сигналов. - 5 -
Комплексная цель модуля. - 5 -
Лекция 1. Общие понятия и определения. - 5 -
Лекция 2. Формирование и представление сигналов. - 10 -
Лекция 3. Спектры импульсных сигналов. - 19 -
Лекция 4. Основы оптимальной обработки сигналов. - 23 -
Контрольные вопросы. - 27 -
Проектное задание. - 27 -
Тестовый контроль. - 27 -
Таблица перевода ответов. - 29 -
Модуль 2.Обнаружение, различение и фильтрация сигналов. - 29 -
Комплексная цель модуля. - 29 -
Лекция 5. Задача обнаружения сигналов. - 29 -
Лекция 6. Различение сигналов. - 35 -
Лекция 7. Восстановление сигналов. - 39 -
Контрольные вопросы.. - 46 -
Проектное задание. - 46 -
Тестовый контроль. - 46 -
Таблица перевода ответов. - 48 -
Модуль 3. Помехоустойчивое кодирование. - 48 -
Лекция 8. Основы помехоустойчивого кодирования. Простейшие коды. - 48 -
Лекция 9. Код Хэмминга и циклические коды.. - 53 -
Контрольные вопросы.. - 59 -
Проектное задание. - 59 -
Тестовый контроль. - 59 -
Таблица перевода ответов. - 61 -
Список литературы.. - 61 -
Введение
Несмотря на значительное число публикаций, посвященных описанию различных методов обработки сигналов в системах связи, существует дефицит учебных материалов, где в компактной форме освещались вопросы рабочей программы «Основы теории систем связи с подвижными объектами». Это обстоятельство затрудняет организацию учебного процесса, особенно, если значительная его часть отводится на самостоятельную работу студентов. Настоящий курс лекций в определенной степени должен разрешить эту проблему.
Характерной чертой приема сигналов систем связи с подвижными объектами является наличие флуктуации принимаемых сигналов вследствие многолучевости распространения и нестационарности характеристик радиоканала. Это привело к разработке специальных методов обработки, таких как разнесенный прием, RAKE-прием, интерливит и др. Устройства обработки при этом могут быть достаточно сложными, но составляющие их части строятся по классическим принципам обработки сигналов. Изучению этих принципов посвящен данный семестровый курс лекций, охватывающий первую часть дисциплины «Основы теории систем связи с подвижными объектами»
Так как курс рассчитан и на самостоятельное изучение, он разбит на отдельные законченные учебные модули. Каждый из которых заканчивается вопросами самопроверки, проектным заданием и вопросами тестового контроля. Все это позволяет студентам оценить степень усвоения теоретического материала. Модули в свою очередь разбиты на лекции. Из общего числа выделены часы для самостоятельного изучения отдельных вопросов и выполнения тестовых заданий. Это отражено в календарно-тематическом плане.
Таблица. Календарно-тематический план
| № | Вид занятия | Тема |
| Лекция | Цель курса. Общие понятия | |
| Лекция | Формирование и представление сигналов | |
| Самостоятельная работа | Изучение спектров сигналов. Тестовый контроль | |
| Лекция | Основы оптимальной обработки | |
| Лекция | Критерии обнаружения | |
| Самостоятельная работа | Изучение вопросов различения сигналов. Тестовый контроль | |
| Лекция | Восстановление сигналов | |
| Лекция | Основы помехоустойчивого кодирования | |
| Самостоятельная работа | Изучение простейших кодов. Тестовый контроль | |
| Лекция | Циклические коды | |
| Самостоятельная работа | Тестовый контроль по всем разделам курса |
Структура календарно-тематического плана позволяет студентам, прослушав основы конкретного материала, затем закрепить свои знания самостоятельным изучением других вопросов и проведением самотестирования.
Модуль 1. Модели сигналов и помех.
Представление и основы обработки сигналов
Комплексная цель модуля
Целью модуля является получение знаний об общих принципах построения систем связи. Эта задача включает в себя усвоение основных определений, получение необходимых сведений по методам формирования и представления сигналов, а также понятий по основам оптимальной обработки сигналов.
Лекция 1. Общие понятия и определения
На рисунке 1.1 изображена структурная схема простейшей системы связи. Источником сообщений и получателем может быть человек, автомат,…Лекция 2. Формирование и представление сигналов.
Нанесение информации на носители достигается определенным изменением параметров некоторых физических процессов, состояний, соединений, комбинаций… Сигналами называются физические процессы, параметры которых содержат… Для образования сигналов используются колебания (рис. 1.4 а) или импульсыЛекция 3. Спектры импульсных сигналов
Рассмотрим спектры одиночных импульсов различной формы. Их определение производится подстановкой аналитического описания импульса в формулу для… (1.22)Лекция 4. Основы оптимальной обработки сигналов
Если на входе приемника действует сигнал x(t), равный сумме полезного сигнала и помехи n(t) или только помехе, то оптимальный приемник в случае… (1.23) Значение корреляционного интеграла (1.23) находится с помощью коррелятора (рис. 1.14) или согласованного фильтра…Контрольные вопросы.
- Назовите основные этапы обработки сигналов в системе связи.
- Как осуществляется согласование сигнала с каналом?
- Перечислите основные виды помех.
- Сравните параметры гармонического и импульсного носителей.
- Чем отличаются спектры периодических и непериодических сигналов?
- Сравните спектры амплитудно- и частотно- модулированных сигналов при разных индексах модуляции.
- Что произойдет со спектром импульсной последовательности при увеличении длительности импульсов?
- Что произойдет со спектром импульсной последовательности при уменьшении периода следования импульсов?
- Как определяется ширина спектра сигнала?
Проектное задание
Провести согласование непрерывного канала связи с параметрами  мс;
мс;  ДБ;
ДБ; МГц с частотномодулированным сигналом с гармоническим модулирующим колебанием частотой 10 кГц и определить амплитудно-частотную характеристику согласованного фильтра. При этом задаться необходимыми параметрами сигнала и указать ограничения на эти параметры.
МГц с частотномодулированным сигналом с гармоническим модулирующим колебанием частотой 10 кГц и определить амплитудно-частотную характеристику согласованного фильтра. При этом задаться необходимыми параметрами сигнала и указать ограничения на эти параметры.
Тестовый контроль
Таблица перевода ответов
| Варианты ответов | Оценка |
| 1.3; 2.4; 3.2; 4.3; 5.1; 6.2; 7.3 | Отлично |
| Шесть правильных ответов в любой комбинации | Хорошо |
| Четыре или пять правильных ответов в любой комбинации | Удовлетворительно |
| Менее четырех правильных ответов | Неудовлетворительно |
Модуль 2.Обнаружение, различение и фильтрация сигналов
Комплексная цель модуля
Целью модуля является получение представления об основных этапах обработки сигналов, а именно об обнаружении, различении и восстановлении сигналов. При этом уделяется много внимания на понимание общих моментов для всех этапов, а также на формирование знаний по конкретной применимости отдельных алгоритмов.
Лекция 5. Задача обнаружения сигналов
Результатом воздействия помех является частичная или полная потеря информации, переносимой полезным сигналом. Приемное устройство, осуществляя обработку входного сигнала, являющегося суммой полезного сигнала и помехи, должно обеспечить извлечение из принятого сигнала возможно большего количества необходимой информации.
Основная задача приемника состоит в том, чтобы па основании принятой реализации решить наилучшим в каком-то определенном смысле способом, имеется ли данный сигнал в данной реализации (задача обнаружения или различения), или каковы параметры полезного сигнала (задача восстановления). В связи с этим должны быть выработаны критерии, позволяющие по принятому сигналу оптимальным способом решить поставленную задачу.
Задача выбора оптимального способа обработки сигналов и выработки при этом соответствующих критериев составляет содержание теории статистических решений.
С целью наглядного представления положений теории статистических решений введены геометрические понятия пространства принимаемого сигнала (смотри рис. 2.1)
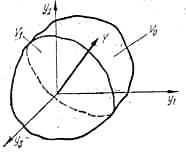
Рис. 2.1 Пространство принимаемого сигнала
Пусть отсчеты принимаемого сигнала, являющегося суммой полезного сигнала и помехи, осуществляются в дискретные моменты времени  . Отсчетные значения принятого сигнала
. Отсчетные значения принятого сигнала  называют выборочными значениями, а их совокупность — выборкой. Число пвыборочных значений называют размером (или объемом) выборки.
называют выборочными значениями, а их совокупность — выборкой. Число пвыборочных значений называют размером (или объемом) выборки.
Совокупность выборочных значений представляют геометрически в виде радиус-вектора Y в n-мерном пространстве, где — координаты конца вектора. Так как величины случайны, то вектор Y также является случайным вектором. Множество возможных значений вектора Y составляет пространство наблюдений V. Общая вероятность попадания конца вектора Y в произвольную точку пространства V
 (2.1)
(2.1)
По аналогии вводят понятия вектора полезного сигнала и вектора помех и соответственно им понятие пространства полезного сигнала и пространства помех.
После нахождения вектора принятого сигнала Y мы не можем однозначно судить о векторе полезного сигнала X. Речь может идти только об апостериорной плотности вероятности
 , т. с. условной плотности вероятности X, если задан вектор Y.
, т. с. условной плотности вероятности X, если задан вектор Y.
Вычисление апостериорной плотности вероятности можно выполнить с помощью формулы Байеса
 (2.2)
(2.2)
Безусловная плотность вероятности  определяется соотношением
определяется соотношением
 (2.3)
(2.3)
Подставляя значение  из (2.3) в (2.2), получим
из (2.3) в (2.2), получим
 (2.4)
(2.4)
Если вектор X может иметь конечное число возможных значений  с априорными вероятностями
с априорными вероятностями  , то формула (2.4) принимает вид
, то формула (2.4) принимает вид
 (2.5)
(2.5)
Следовательно, для нахождения искомой апостериорной вероятности (или плотности вероятности) необходимо знать р(X) или , т. е. априорные характеристики полезного сигнала, и  , определяемые априорными характеристиками полезного сигнала и помехи, а также характером их композиции.
, определяемые априорными характеристиками полезного сигнала и помехи, а также характером их композиции.
Для определения апостериорных вероятностей p(X/Y) или плотностей вероятностей  необходимо знать , которая при заданном значении Y будет зависеть только от X
необходимо знать , которая при заданном значении Y будет зависеть только от X
 (2.6)
(2.6)
Функция L(X) называется функцией правдоподобия. В зависимости от того, является ли X дискретной или непрерывной величиной, функция правдоподобия L(X) может принимать конечное или бесконечное множество значений.
Рассмотрим основные критерии, используемые при решении задачи оптимального приема. Начнем с простейшей задачи — задачи обнаружения сигналов. Задача обнаружения, как отмечалось, состоит в том, чтобы в результате обработки принятого сигнала Y установить, содержится ли в нем полезный сигнал X или нет.
Пусть принимаемый сигнал является суммой полезного сигнала и помехи

Полезный сигнал может принимать дна значения: х1 и х0 с априорными соответственно вероятностями р(х1) и р(х0). 'Гак как сигнал X наверняка имеет одно из этих двух значений, то справедливо соотношение
 (2.7)
(2.7)
Таким образом, возможны две взаимно исключающие (альтернативные) гипотезы: в принятом сигнале содержится полезный сигнал (гипотеза Н1) и отсутствует полезный сигнал (гипотеза Н()). Решающее устройство приемника по данным выборки должно установить, какая из этих гипотез является истинной.
В геометрической интерпретации поставленная задача может быть сформулирована следующим образом. Пространство принятых сигналов V условно разбивается на две части: область V1соответствующую принятию гипотезы Н1 о том, что X=х1 и область V0 соответствующую принятию гипотезы Н() о том, что X = х0. Это значит, что если вектор принятого сигнала окажется в пределах области V1 то принимается гипотеза Н1. Если же вектор сигнала Y окажется в области V0, то принимается гипотеза Но.
В этих условиях могут иметь место два значения апостериорной вероятности p(X/Y): p(x/Y) — условная вероятность наличия полезного сигнала X при данном значении выборки Y, р(x0/У) — условная вероятность отсутствия X при данном значении выборки Y.
Аналогично можно рассматривать два значения функции правдоподобия L(X):  — условная плотность вероятности выборки Y при наличии полезного сигнала X;
— условная плотность вероятности выборки Y при наличии полезного сигнала X;  — условная плотность вероятности выборки Y при отсутствии X.
— условная плотность вероятности выборки Y при отсутствии X.
Отношение функций правдоподобия
 (2.8)
(2.8)
принято называть отношением правдоподобия.
Для выбора гипотезы Н1 или Н() должно быть взято за основу определенное правило принятия решений.
Выбор правила принятия решения в математическом отношении сводится к оптимальному разбиению пространства принимаемых сигналов V на области V1 и V0
Для того чтобы выбрать то или иное правило принятия решения, необходимо руководствоваться определенными критериями.
Критерий максимума правдоподобия. Этот критерий формулируется следующим образом: наиболее правдоподобно то значение параметра X, для которого функция правдоподобия L(X) максимальна.
В соответствии с этим критерием в случае двухальтернативиой ситуации (обнаружение сигнала) сравнивается два значения функции правдоподобия — и
и  , и принимается та гипотеза, которой соответствует большее значение функции правдоподобия. Если, например,
, и принимается та гипотеза, которой соответствует большее значение функции правдоподобия. Если, например,  , то принимается гипотеза Н1. Если же
, то принимается гипотеза Н1. Если же  , то принимается гипотеза Н().
, то принимается гипотеза Н().
Этот критерий можно записать в следующем виде через отношение правдоподобия
если  , то Х=х1
, то Х=х1
(2.9)
при  , то Х=х0
, то Х=х0
Таким образом, в соответствии с данным критерием методика принятия решения сводится к следующему: вычисляются функции правдоподобия и  , определяется отношение правдоподобия
, определяется отношение правдоподобия  , и в зависимости от того, больше, равно или меньше , единицы принимается соответствующая гипотеза.
, и в зависимости от того, больше, равно или меньше , единицы принимается соответствующая гипотеза.
Практическое достоинство данного критерия заключается в том, что при его применении не требуется знания априорных вероятностей р(х1) и р(х0) сигнала X.
Критерий максимума апостериорной вероятности. По этому критерию при полученном значении выборки Y принимается та гипотеза, при которой апостериорная вероятность р(Х/Y) максимальна.
Для случая двухальтернативной ситуаций сравниваются два значения апостериорной вероятности p(x1/Y) и p(x0/Y). Обычно рассматривается отношение этих величин и правило принятия решения записывается в виде:
если  , то Х=х1
, то Х=х1
(2.10)
если  , то Х=х0
, то Х=х0
Используя формулу Байеса (2.5), выразим отношение апостериорных вероятностей через отношение функций правдоподобия
 (2.11)
(2.11)
Тогда критерий максимума апостериорной вероятности (2.10) может быть следующим образом выражен через отношение правдоподобия:
если  , то Х=х1
, то Х=х1
(2.12)
если  , то Х=х0
, то Х=х0
Соотношения (2.12) можно представить в виде:
если  , то Х=х1
, то Х=х1
(2.13)
если  , то Х=х0
, то Х=х0
Таким образом, процедура принятия решения согласно критерию максимума апостериорной вероятности такая же, как и согласно критерию максимума правдоподобия. Отличие заключается лишь в том, что в первом случае отношение правдоподобия сравнивается с единицей, а во втором случае — с отношением априорных вероятностей  . При наличии априорных данных р(х1) и р(х0) целесообразно применять критерий максимума апостериорной вероятности, так как при этом имеется возможность пользоваться дополнительной информацией, позволяющей точнее решить задачу обнаружения сигнала.
. При наличии априорных данных р(х1) и р(х0) целесообразно применять критерий максимума апостериорной вероятности, так как при этом имеется возможность пользоваться дополнительной информацией, позволяющей точнее решить задачу обнаружения сигнала.
Критерий идеального наблюдателя (критерий Котельникова). Согласно данному критерию принимается та гипотеза, при которой обеспечивается минимум общей ошибки принятия решения.
При решении задачи обнаружения сигнала могут иметь место ошибки двух родов:
1) при отсутствии полезного сигнала вектор принятого сигнала Y оказывается в области V1 и принимается в соответствии с этим гипотеза Н1;
2) при наличии полезного сигнала вектор Y оказывается в области V0 принимается гипотеза Но. Первая ошибка называется ошибкой первого рода, или «ложной тревогой». Вторая ошибка называется ошибкой второго рода, или «пропуском сигнала». Количественно ошибки первого и второго рода оцениваются условными вероятностями  и
и  ошибочных решений о наличии полезного сигнала, когда в действительности он отсутствует, и об отсутствии сигнала, когда в действительности он имеется
ошибочных решений о наличии полезного сигнала, когда в действительности он отсутствует, и об отсутствии сигнала, когда в действительности он имеется
 (2.14)
(2.14)
Общая безусловная вероятность ошибочного решения определяется выражением
 (2.15)
(2.15)
Критерий идеального наблюдателя минимизирует общую ошибку, определяемую, выражением (2.15).
Следовательно, условие оптимального решения по критерию
идеального наблюдателя имеет вид

Подставим в (2.15) из (2.14) значения ошибок первого и второго рода
 (2.17)
(2.17)
Ошибку второго рода можно представить в виде
 (2.18)
(2.18)
Подставив из (2.18) в (2.17) значение р, получим
 (2.19)
(2.19)
Условие (2.16) будет обеспечено, если интеграл в (2.19) будет
максимален. Для этого нужно так выбрать область V1, чтобы
подынтегральная функция была положительной, т. е.
 (2.20)
(2.20)
Условие (2.20) определяет принадлежность вектора Y области V1, т. е. выбор гипотезы Н1. Перепишем (2.20) в виде:
если  , то Х=х1
, то Х=х1
если  , то Х=х0
, то Х=х0
Таким образом, правила решения, соответствующие критериям идеального наблюдателя и максимума апостериорной вероятности, совпадают. Отличие заключается лишь в исходных условиях.
Критерий Неймана—Пирсона. Данный критерий основам на том, что ошибки первого и второго рода не одинаково опасны, причем ошибка первого рода приводит к таким последствиям, что се вероятность необходимо ограничить некоторой очень малой величиной. Вторую ошибку желательно при этом обеспечить минимальной.
Исходя из этого, критерий Неймана—Пирсона можно сформулировать следующим образом: наилучшим решением является такое, при котором обеспечивается наименьшая вероятность ошибки второго рода при заданной допустимой вероятности ошибки первого рода.
Итак, согласно критерию Неймана—Пирсона должно быть обеспечено
 (2.21)
(2.21)
при
 (2.22)
(2.22)
Задача может быть решена методом Лагранжа отыскания условного экстремума. Опуская промежуточные выкладки запишем конечный результат.
Правило принятия решения согласно критерию Неймана— Пирсона может быть записано в виде:
если  , то Х=х1
, то Х=х1
(2.23)
если  , то Х=х0
, то Х=х0
Пороговое значение  определяется из равенства
определяется из равенства
 (2.24)
(2.24)
Критерий минимального риска (критерий Байеса). Этот критерий учитывает не только неравноценность ошибок первого и второго рода, но и те последствия, к которым приводят эти ошибки. Для учета этих последствий введены весовые коэффициенты (коэффициенты цены ошибок) Г| и гО1, приписываемые соответственно ошибкам первого и второго рода.
Усредненная величина
 (2.25)
(2.25)
получила название риска.
В соответствии с критерием минимального риска правило выбора решения формулируется следующим образом: принимается та гипотеза, при которой обеспечивается минимальный риск.
Представим (2.25) в виде
 (2.26)
(2.26)
Минимум выражения (2.26) будет при условии, если подынтегральная функция положительная

Отсюда получаем следующее правило принятия решения:
если  , то Х=х1
, то Х=х1
(2.27)
если  , то Х=х0
, то Х=х0
Рассматриваемый критерий наиболее целесообразен экономически, так как обеспечивает минимизацию потерь, обусловленных ошибками в принятии решений. Но он требует максимальной априорной информации, ибо помимо функций распределения и априорных вероятностей р(Х), необходимо также знание весовых коэффициентов  и
и .
.
Минимаксный критерий. Минимаксный критерий представляет собой специальный случай критерия минимального риска, когда априорные вероятности  и
и  не заданы.
не заданы.
Дело в том, что риск  , получающий наименьшее значение при условии (2.27), зависит от априорных вероятностей и . При определенном соотношении этих вероятностей, который мы назовем наихудшим, риск будет максимален.
, получающий наименьшее значение при условии (2.27), зависит от априорных вероятностей и . При определенном соотношении этих вероятностей, который мы назовем наихудшим, риск будет максимален.
Идея минимаксного критерия заключается в том, что обеспечивается минимум риска при наихудшем соотношении априорных вероятностей.
Для определения наихудшего соотношения между и необходимо приравнять нулю производную от правой части (2.26) по (или по р(х0)).
В результате получается трансцендентное уравнение, обеспечивающее максимум риска. Затем определяется пороговое значение отношения правдоподобия
 (2.28)
(2.28)
Таким образом, правило принятия решения для всех рассмотренных критериев одинаково и сводится к сравнению отношения правдоподобия , с пороговым значением . Отличие заключается лишь в величине .
Так как величина определяет границу между областями V1 и V0 пространства V, то каждый критерий определяет способ разбивки пространства принятого сигнала области V1 и V0 .
Равенство  определяет уравнение поверхности раздела поверхностей V1 и V0 .
определяет уравнение поверхности раздела поверхностей V1 и V0 .
Лекция 6. Различение сигналов
При различении сигналов имеет место миогоальтернативная ситуация, когда полезный сигнал X может иметь много значений и приемное устройство должно… Пусть сигнал X может иметь m возможных значений с априорными вероятностями…Лекция 7. Восстановление сигналов
Восстановление сигналов сводится к оценке некоторого числа неизвестных параметров полезного сигнала. Ограничимся рассмотрением случая оценки одного… где f (t) - известная функция времени; В - параметр сигнала.Контрольные вопросы
- Дайте определение функции правдоподобия и отношению правдоподобия.
- Как осуществляется выбор критерия обнаружения в данной конкретной постановке?
- В чем сходство и различие всех критериев обнаружения?
- В чем различие задачи обнаружение сигналов от задачи обнаружения?
- Как осуществляется корреляционный прием сигналов?
- Дайте физическую трактовку критерия минимума среднеквадратической ошибки.
- Назовите случай идеальной фильтрации.
- Почему полезно изучение физически нереализуемых фильтров?
Проектное задание
Синтезировать обнаружитель постоянного сигнала величиной 2 В на фоне Гауссова белого шума со среднеквадратичным отклонением  В, используя критерий максимума апостериорной вероятности. Привести структурную схему обнаружителя. Проанализировать ситуацию, когда уровень помехи может оказаться больше, чем расчетное значение.
В, используя критерий максимума апостериорной вероятности. Привести структурную схему обнаружителя. Проанализировать ситуацию, когда уровень помехи может оказаться больше, чем расчетное значение.
Тестовый контроль
Таблица перевода ответов
| Варианты ответов | Оценка |
| 1.2; 2.2; 3.1; 4.4; 5.3; 6.3; 7.3 | Отлично |
| Шесть правильных ответов в любой комбинации | Хорошо |
| Четыре или пять правильных ответов в любой комбинации | Удовлетворительно |
| Менее четырех правильных ответов | Неудовлетворительно |
Модуль 3. Помехоустойчивое кодирование
Комплексная цель модуля
Целью модуля является получение представления об общих принципах помехоустойчивого кодирования, а также получение минимально необходимых сведений о некоторых типах простейших, распространенных кодов. Усвоение указанного материала позволит обучающимся справиться в дальнейшем с изучением сложных помехоустойчивых кодов, используемых в современных системах связи с подвижными объектами.
Лекция 8. Основы помехоустойчивого кодирования. Простейшие коды.
Помехоустойчивые коды — одно из наиболее эффективных средств обеспечения высокой верности передачи дискретной информации. Создана специальная теория… Бурное развитие теории помехоустойчивого кодирования связано с внедрением… Теорема Шеннона для дискретного канала с помехами утверждает, что вероятность ошибок за счет действия в канале помех…Лекция 9. Код Хэмминга и циклические коды
Известно несколько разновидностей кода Хэмминга, характеризуемых различной корректирующей способностью. Но в основу построения всех их положен один… Код Хэмминга, как и любой (n, k) код, содержит к информационных и р = п - к… Необходимое количество проверочных символов р (или значность кода n) определяется из соотношения (3.9). Значения…Контрольные вопросы
- Физически объясните возможность исправления ошибок в кодовых комбинациях.
- Какие основные недостатки кодов, исправляющих ошибки большой кратности?
- Почему удобно использовать полиномиальное представление кодовых комбинаций?
- Сравните алгоритм построения циклических кодов?
- Сравните различные простейшие коды?
- Почему оправдано ограничиваются исправлением однократных ошибок?
Проектное задание
Сформировать код Хемминга для передачи алфавита из 30 символов с возможностью исправления однократных ошибок. Привести примеры не менее 5 разрешенных информационных комбинаций и соответствующих закодированных комбинаций. Показать возможность исправления однократной ошибки.
Тестовый контроль
Таблица перевода ответов
| Варианты ответов | Оценка |
| 1.3; 2.4; 3.4; 4.3; 5.2; 6.4; 7.1 | Отлично |
| Шесть правильных ответов в любой комбинации | Хорошо |
| Четыре или пять правильных ответов в любой комбинации | Удовлетворительно |
| Менее четырех правильных ответов | Неудовлетворительно |
Список литературы
Основная
- Зюко А.Г. и др. Теория электрической связи. – М.: Радио и связь, 1999 – 433 с.
- Тихонов В.И. Оптимальный прием сигналов – М.: Радио и связь, 1983 – 320 с.
- Галкин В.А. Цифровая мобильная радиосвязь – М.: Горячая линия - Телеком, 2007 – 432 с.
- Шахтарин Б.И. Обнаружение сигналов – М.: Гелиос АРВ, 2006 – 488 с.
- Кузьмин И.В., Кедрус В.А. Основы теории информации и кодирования. – Киев; Высшая школа, 1977 – 280 с.
Дополнительная
- Прокис Дж. Цифровая связь. М.: Радио и связь, 2000 – 797 с.
- Темников Ф.Е. и др. Теоретические основы информационной техники. – М.: Энергия, 1971 – 424 с.
- Золотарев В.В., Овечкин Г.В. Помехоустойчивые кодирование. – М.: Горячая линия – Телеком, 2004 – 126 с.
- Зюко А.Г. и др. Теория передачи сигналов. – М.: Связь, 1980 – 288 с.
– Конец работы –
Используемые теги: основы, Теории, систем, связи, вижными, объектами0.093
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Основы теории систем связи с подвижными объектами
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.176 сек.
Новости и инфо для студентов