Лекция 6. Различение сигналов
При различении сигналов имеет место миогоальтернативная ситуация, когда полезный сигнал X может иметь много значений и приемное устройство должно определить, какое именно значение из этого множества имеет место в действительности. Различение многих сигналов в принципиальном отношении мало отличается от случая обнаружения сигнала, т.е. случая различения двух сигналов. В соответствии с этим методы многоальтернативных решений являются обобщением соответствующих методов двухальтернативных решений.
Пусть сигнал X может иметь m возможных значений  с априорными вероятностями
с априорными вероятностями  соответственно
соответственно

При этом пространство сигнала Y разбивается на m областей  соответствующих принятию гипотез
соответствующих принятию гипотез  том, что Х = х1, Х = х2,...,Х = хм соответственно. Правила принятия решений и разбивка пространства V на области могут производиться в соответствии с любым из критериев, рассмотренных для случая двухальтернативной ситуации и обобщенных на случай многоальтернативной ситуации.
том, что Х = х1, Х = х2,...,Х = хм соответственно. Правила принятия решений и разбивка пространства V на области могут производиться в соответствии с любым из критериев, рассмотренных для случая двухальтернативной ситуации и обобщенных на случай многоальтернативной ситуации.
Процедура работы решающего устройства приемника при различении сигналов следующая. По данным выборки Y определяются функции правдоподобия  и вычисляются отношения правдоподобия
и вычисляются отношения правдоподобия  для всех возможных сочетании пар
для всех возможных сочетании пар  и
и  . Сравниваются полученные значения отношений правдоподобия с пороговым значением и выбирается такое значение сигнала для которого все
. Сравниваются полученные значения отношений правдоподобия с пороговым значением и выбирается такое значение сигнала для которого все  .
.
Рассмотрим в качестве, примера случай, когда используется критерий минимального риска.
В случае многоальтернативной ситуации ошибки принятия решения заключается в том, что наблюдаемая выборка оказывается в области Vк, в то время как в действительности сигнал X имеет значение . Цена ошибочных решений учитывается путем введения весовых коэффициентов  .
.
Для заданного значения сигнала , средняя величина потерь за счет неправильных решений может быть оценена коэффициентом
 (2.29)
(2.29)
Величины  носят название условного риска.
носят название условного риска.
Усредняя условный риск по всем возможным значениям X, получим средний риск
 (2.30)
(2.30)
Критерий минимального риска для случая многоальтернативной ситуации сводится к минимизации функции (2.30).

Условие (2.31) определяет правила принятия решения, а также способ разбиения пространства принятого сигнала на области .
Рассуждая аналогично как при выборе соотношения (2.27), можно показать, что реализация условия (2.31) даст следующую систему m неравенств, обеспечивающих принятие гипотезы Нk, что X = хк
 (2.31)
(2.31)
Как уже установлено, оптимальное решающее устройство должно строиться таким образом, чтобы оно могло вычислить функции правдоподобия L(X) и отношение правдоподобия  с последующим сравнением его с некоторым пороговым значением
с последующим сравнением его с некоторым пороговым значением  . Следовательно, в первую очередь решающее устройство должно вычислять условные плотности вероятности
. Следовательно, в первую очередь решающее устройство должно вычислять условные плотности вероятности  . Очевидно, схема решающего устройства определяется в основном видом этой функции.
. Очевидно, схема решающего устройства определяется в основном видом этой функции.
Рассмотрим общий случай многоальтернативной ситуации, когда полезный сигнал X может принимать m значений. Будем полагать помеху  , нормальной с нулевым математическим ожиданием и аддитивной. Следовательно, принимаемый сигнал у
, нормальной с нулевым математическим ожиданием и аддитивной. Следовательно, принимаемый сигнал у

Для любого отсчетного значения принятого сигнала уi; можно записать
 (2.32)
(2.32)
При взаимной независимости полезного сигнала и помехи функции  определяется законом распределения помехи
определяется законом распределения помехи

Для принятия оптимального решения необходимо определить отношения правдоподобия
 (2.33)
(2.33)
Перейдем к случаю непрерывного приема сигналов в течение определенного времени Т. Будем при этом полагать, что помеха типа белого шума.
Переход к непрерывному наблюдению можно осуществить с использованием теоремы Котельникова. Полагая, что отсчеты осуществляются через интервал времени  , где
, где  – граничная частота полосы пропускания канала связи, умножаем числитель и знаменатель показателя степени е в выражении (2.33) на
– граничная частота полосы пропускания канала связи, умножаем числитель и знаменатель показателя степени е в выражении (2.33) на  и переходим в числителе показателя степени от суммирования отсчетов к интегрированию в пределах от 0 до Т, где
и переходим в числителе показателя степени от суммирования отсчетов к интегрированию в пределах от 0 до Т, где  .
.
 (2.34)
(2.34)
где  и
и  - энергии сигналов
- энергии сигналов  и . Полагая энергии сигналов и - одинаковыми, (2.34) приводим к виду
и . Полагая энергии сигналов и - одинаковыми, (2.34) приводим к виду

Выбирается в качестве истинного такой сигнал хк для которого
 (2.35)
(2.35)
Условие (2.35) можно переписать в виде:
 (2.36)
(2.36)
В соответствии с (2.36) структура решающего устройства должна иметь, вид, как показано на рис. 2.2.
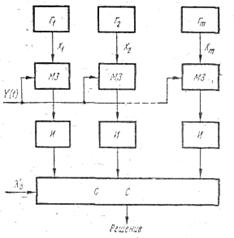
Рис.2.2 Структура решающего устраойства
Устройство содержит набор генераторов сигналов множительных звеньев МЗ, интеграторов И и схему сравнения СС.
На выходе МЗ получается произведение функций y(t)хi(t), которое затем интегрируется интегратором И. Схема сравнения СС определяет разность между различными сочетаниями выходных сигналов интеграторов, сравнивает полученные результаты со стандартным сигналом  и выносит решение в пользу той функции хк, для которой выполняется условие (2.36)
и выносит решение в пользу той функции хк, для которой выполняется условие (2.36)
Величина стандартного сигнала  определяется критерием, положенным в основу синтеза решающего устройства. В частности, если в качестве такового используется критерий идеального наблюдателя (критерий Котельникова), то
определяется критерием, положенным в основу синтеза решающего устройства. В частности, если в качестве такового используется критерий идеального наблюдателя (критерий Котельникова), то
 (2.37)
(2.37)
Решающее устройство, реализуемое па базе критерия идеального наблюдателя, обеспечивает минимальную вероятность ошибки принятия решения. Такие устройства принято называть идеальными приемниками.