Приклади розрахунків
3.4.1 Приклад 1.
Розглянемо раму, яка була розрахована в пункті 1.7.1. “Еквівалентна” половина розрахункової схеми в цьому випадку залишається без змін, але кількість невідомих ( ) змінюється. Кількість невідомих кутів повороту не залежить від прийнятого припущення, тобто
) змінюється. Кількість невідомих кутів повороту не залежить від прийнятого припущення, тобто  (кут повороту вузла 2), а кількість незалежних лінійних переміщень вузлів розрахункової схеми
(кут повороту вузла 2), а кількість незалежних лінійних переміщень вузлів розрахункової схеми  . Шарнірно-стержнева система для визначення
. Шарнірно-стержнева система для визначення  зображена на рисунку 3.1.
зображена на рисунку 3.1.

Рисунок 3.1 - Шарнірно-стержнева система для визначення
Виконайте самостійно кінематичний та структурний аналізи цієї схеми та впевніться в тому що .

Рівняння рівноваги вузлів рами не залежать від прийнятого припущення, але використати ми можемо тільки те з них, що не містить поздовжніх сил:

Виражаємо кінцеві моменти, що ввійшли в рівняння рівноваги, через переміщення вузлів.
Визначаємо невідому (кут повороту  ):
): 
Визначаємо кінцеві моменти та поперечні сили.








За отриманими результатами будуємо епюри згинальних моментів та поперечних сил.
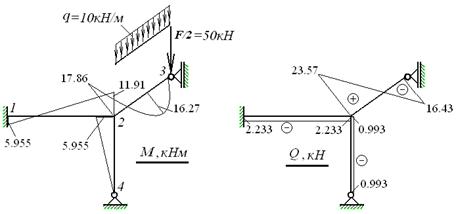
Рисунок 3.2 - Епюри згинальних моментів та поперечних сил
За відомими поперечними силами з умов рівноваги вузлів знаходимо поздовжні сили.
З умови рівноваги вузла 3 (дивись таблицю 2.4) 
маємо:  .
.
З умови рівноваги стержня 2-3 (рисунок 3.3) знайдемо поздовжню силу  .
.


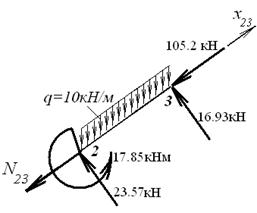
Рисунок 3.3 – До розгляду умов рівноваги стержня 2-3
Із другого та третього рівнянь рівноваги вузла 2 (дивись таблицю 2.4) маємо:

 ;
;
 .
.
За отриманими результатами будуємо епюру поздовжніх сил.

Рисунок 3.4 – Епюра поздовжніх сил