Увага! Виконайте контроль правильності отриманих результатів та порівняйте їх з результатами, отриманими в пункті 1.7.
3.4.2 Приклад 2
Розглянемо раму, яку зображено на рисунку 3.5.
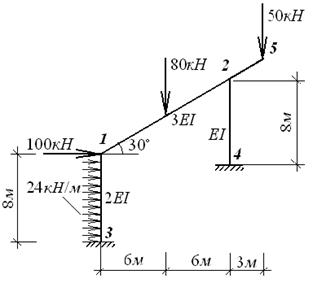
Рисунок 3.5 – Розрахункова схема рами
Вузлів з невідомими переміщеннями в цій розрахунковій схемі три – вузли 1, 2, 5, але в ручних розрахунках переміщення вузла 5 розшукувати нераціонально тому що ділянка 2-5 статично визначувана. Легше розрахувати цю ділянку статичним методом, ніж розшукувати переміщення вузла 5. Будемо розшукувати тільки переміщення вузлів 1 та 2. Кількість невідомих кутів повороту в цих вузах  (
( ). Шарнірно-стержнева система для визначення
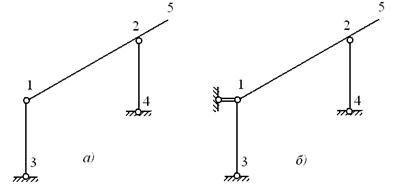
). Шарнірно-стержнева система для визначення  цих вузлів зображена на рисунку 3.6 - схема а). Виконайте кінематичний та структурний аналіз цієї схеми та упевніться в тому, що кількість незалежних лінійних переміщень вузлів розрахункової схеми
цих вузлів зображена на рисунку 3.6 - схема а). Виконайте кінематичний та структурний аналіз цієї схеми та упевніться в тому, що кількість незалежних лінійних переміщень вузлів розрахункової схеми  (горизонтальне переміщення вузлів 1 та 2 -
(горизонтальне переміщення вузлів 1 та 2 -  ).
).
 - вихідна рама;
- вихідна рама; - шарнірно-стержнева система
- шарнірно-стержнева система
Рисунок 3.6 – Шарнірно-стержневі системи для визначення кількості незалежних лінійних
переміщень вузлів 1 та 2.
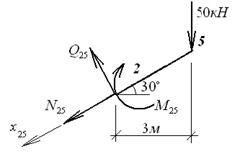
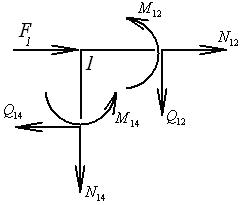
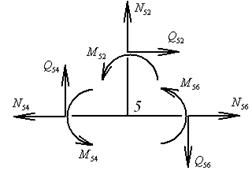
Два рівняння, що не містять поздовжніх сил, це рівняння моментів вузлів 1 та 2 (рисунки 3.7 та 3.8). Зверніть увагу на те, що вузол 2 вирізано зі стержнем 2-5.

Рисунок 3.7 – Вузол 1 з діючими на нього силами.
Рівняння рівноваги вузла 1:
1.
2.
3.

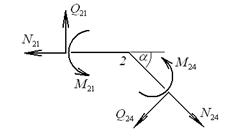
Рисунок 3.8 – Вузол 2 з діючими на нього силами.
Рівняння рівноваги вузла 2:
1.
2.
3.
Третє рівняння без поздовжніх сил здобудемо з умов рівноваги частини, яку зображено на рисунку 3.10. Перетин, за допомогою якого отримано цю частину, зображено на рисунку 3.9.

Рисунок 3.9 – Перетин, який перерізає тільки паралельні стержні.

Рисунок 3.10 – Ригель рами з діючими на нього силами.
Рівняння рівноваги ригеля, яке не містить поздовжніх сил:

Таким чином, система рівнянь рівноваги для знаходження трьох невідомих цієї задачі має вигляд:
Усі подальші обчислення виконуються за відомою схемою, якою ми користувалися раніше.
Перше рівняння рівноваги:
Друге рівняння рівноваги:
Третє рівняння рівноваги:
Після нескладних перетворень систему рівнянь для визначення  можна представити у вигляді:
можна представити у вигляді:
Розв’язавши цю систему отримаємо:


Користуючись основними залежностями методу переміщень знаходимо згинальні моменти та поперечні сили в кінцевих перерізах стержнів.


Поперечні сили можна визначити й статичним методом. Для цього стержень, який розраховується, необхідно завантажити знайденими кінцевими моментами, місцевим навантаженням та кінцевими поперечними силами, що розшукуються, і скласти рівняння рівноваги. Розглянемо, як це робиться, на прикладі стержня 1-3.
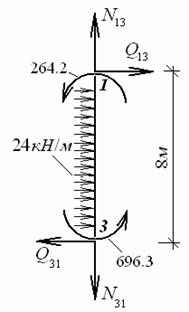
Рисунок 3.11 – Стержень 1-3.

звідки 


звідки 
Поздовжні сили знайдемо з умов рівноваги вузлів рами.
Таблиця 3.2 – До визначення поздовжніх сил у рамі
| Ескіз вирізаного вузла з діючими на нього зусиллями | Умови рівноваги вузла |
|
 ,
звідки ,
звідки 
|

|

 Звідки
Звідки 

 звідки
звідки  . .
|
Продовження таблиці 3.2

| 
  Звідки
Звідки  . .


 Звідки
Звідки  . .
|
За отриманими результатами будуємо епюри внутрішніх зусиль  (рисунки 3.12, 3.13, 3.14).
(рисунки 3.12, 3.13, 3.14).
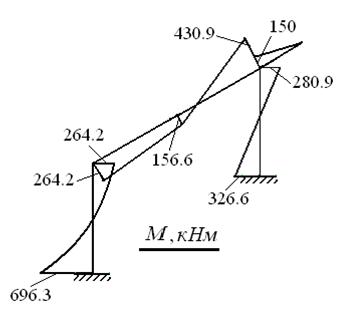
Рисунок 3.12 – Епюра згинальних моментів.
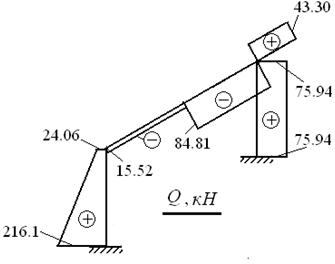
Рисунок 3.13 – Епюра поперечних сил.

Рисунок 3.14 Епюра поздовжніх сил.
3.4.3 Приклад 3
Розглянемо раму, яку показано на рисунку 3.15а. Вузли 1 та 2 мають чотири лінійних переміщення  . Однак вони залежні між собою. Щоб з'ясувати, скільки серед них незалежних, слід у вузли 1, 2, 3, 4 розрахункової схему увести шарніри та виконати кінематичний аналіз цієї системи. Шарнірно-стержнева система, яка буде при цьому буде отримана, зображена на рисунку 3.15б. Кінематичний аналіз цієї системи показує, що вузли 1 та 2, мають одну ступінь вільності:
. Однак вони залежні між собою. Щоб з'ясувати, скільки серед них незалежних, слід у вузли 1, 2, 3, 4 розрахункової схему увести шарніри та виконати кінематичний аналіз цієї системи. Шарнірно-стержнева система, яка буде при цьому буде отримана, зображена на рисунку 3.15б. Кінематичний аналіз цієї системи показує, що вузли 1 та 2, мають одну ступінь вільності:
W = 2·Уф – С = 2·2 –3= 1.
Структурний аналіз підтверджує цей результат. Одна в'язь, яку накладено на вузол 1, (на рисунку 3.15с її зображено подвійною лінією) перетворює систему в незмінювану, тобто незалежною можна вважати тільки  , а інші переміщення
, а інші переміщення  треба виразити через .
треба виразити через .

- вихідна рама; - шарнірно-стержнева система; с - шарнірно-стержнева система з в’язю
Рисунок 3.15 – Вихідна рама та шарнірно-стержневі системи для визначення кількості та напрямку лінійних переміщень вузлів
Для того щоб установити зв'язок між та , необхідно використати умови відсутності поздовжніх деформацій стержнів рами  , користуючись при цьому рівнянням (3.1).
, користуючись при цьому рівнянням (3.1).



Урахувавши те, що  , та граничні умови граничні умови (
, та граничні умови граничні умови ( ), отримаємо:
), отримаємо: 
Для визначення трьох невідомих рами, яку зображено на рисунку 3.15 ( ), нам необхідно скласти три рівняння рівноваги, що не міститимуть поздовжніх сил. Для двох вузлів рами (вузли 1 та 2) можемо скласти шість незалежних рівнянь рівноваги. Ескізи цих вузлів рами, діючі на них зусилля та умови рівноваги наведено нижче в таблиці 3.3
), нам необхідно скласти три рівняння рівноваги, що не міститимуть поздовжніх сил. Для двох вузлів рами (вузли 1 та 2) можемо скласти шість незалежних рівнянь рівноваги. Ескізи цих вузлів рами, діючі на них зусилля та умови рівноваги наведено нижче в таблиці 3.3
Таблиця 3.3 - Ескізи вузлів й умови рівноваги прикладу 3
| Ескіз вирізаного вузла з діючими на нього зусиллями | Умови рівноваги вузла |

|
1. 2.
2. 3.
3.
|
Продовження таблиці 3.3
| Ескіз вирізаного вузла з діючими на нього зусиллями | Умови рівноваги вузла |
|
4. 5.
5. 6.
6.
|
З шести рівнянь рівноваги вузлів два (перше та четверте) не містять в собі поздовжніх сил:

Невистачаюче третє рівняння отримаємо з рівнянь проекцій сил, які діють на вузли. На стержнях рами відсутнє місцеве навантаження, тому  ,
,  . Ураховуючи ці рівності після виключення з рівнянь проекцій поздовжніх сил отримаємо :
. Ураховуючи ці рівності після виключення з рівнянь проекцій поздовжніх сил отримаємо :

Подальша робота по формуванню розв’язувальної системі рівнянь, обчисленню внутрішніх зусиль та побудові епюр виконується таким же чином, як і в прикладі пункту 3.3.2.
3.4.4 Приклад 4
Розглянемо раму, яку зображено на рисунку 3.16а. У цьому прикладі, як і в попередньому, зупинимося тільки на двох пунктах алгоритму – визначення кількості невідомих та складання умов рівноваги, які не містять поздовжніх сил. Мінімальна кількість вузлів у цій розрахунковій схемі дорівнює восьми. Кількість невідомих кутів повороту в цих вузлах дорівнює шести -  . Для того щоб визначити кількість незалежних лінійних переміщень цих вузлів, слід увести шарніри у вузли 1- 8 та проаналізувати отриману шарнірно-стержневу систему. Шарнірно-стержневу систему для нашого прикладу зображено на рисунку 3.16б.
. Для того щоб визначити кількість незалежних лінійних переміщень цих вузлів, слід увести шарніри у вузли 1- 8 та проаналізувати отриману шарнірно-стержневу систему. Шарнірно-стержневу систему для нашого прикладу зображено на рисунку 3.16б.
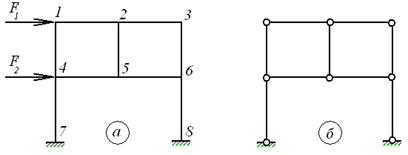
- вихідна рама; - шарнірно-стержнева система
Рисунок 3.16 –Вихідна рама та шарнірно-стержнева система для визначення
Кінематичний аналіз цієї системи показує, що вузли 1- 6, мають три ступені вільності:
W = 2·Уф – С = 2·6 – 9 = 3,
де Уф – кількість вузлів; С – кількість в'язів.
Структурний аналіз підтверджує цей результат. Три в'язі, які накладено на ці вузли, (на рисунку 3.17 вони зображені подвійною лінією) перетворюють систему в незмінювану.

Рисунок 3.17 – До визначення кількості незалежних лінійних переміщень вузлів
Напрям в'язів указує на напрям незалежних лінійних переміщень вузлів: вузли 1, 2, 3 мають горизонтальне переміщення , вузли 4, 5, 6 - горизонтальне переміщення  , а вузли 2 та 5 – вертикальне переміщення
, а вузли 2 та 5 – вертикальне переміщення  . Таким чином, рама, яку зображено на рисунку 3.16а, має 9 невідомих методу переміщень -
. Таким чином, рама, яку зображено на рисунку 3.16а, має 9 невідомих методу переміщень -  Для того, щоб сформувати розв’язувальну систему рівнянь, необхідно скласти дев’ять рівнянь рівноваги, які не міститимуть поздовжніх сил. Для шести вузлів цієї рами можна скласти вісімнадцять рівнянь рівноваги. Ці рівняння наведено в таблиці 3.4.
Для того, щоб сформувати розв’язувальну систему рівнянь, необхідно скласти дев’ять рівнянь рівноваги, які не міститимуть поздовжніх сил. Для шести вузлів цієї рами можна скласти вісімнадцять рівнянь рівноваги. Ці рівняння наведено в таблиці 3.4.
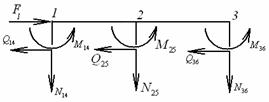
Таблиця 3.4 - Ескізи вузлів і умови рівноваги
| Ескіз вирізаного вузла з діючими на нього зусиллями | Умови рівноваги вузла |
|
1. 2.
2. 3.
3.
|

|
4. 5.
5. 6.
6.
|
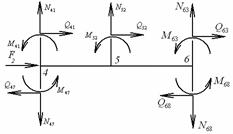
Продовження таблиці 3.4
| Ескіз вирізаного вузла з діючими на нього зусиллями | Умови рівноваги вузла |

|
7. 8.
8. 9.
9.
|

|
10. 11.
11. 12.
12.
|
|
13. 14.
14. 15.
15.
|

|
16. 17.
17. 18.
18.
|
З вісімнадцяти рівнянь рівноваги вузлів тільки шість не містять в собі поздовжніх сил ( рівняння моментів), а невідомих – 9. Не вистачає трьох рівнянь. Невистачаючі рівняння отримаємо з рівнянь проекцій сил, які діють на вузли. Їх можна отримати послідовним виключенням з рівнянь проекцій поздовжніх сил.
На стержнях рами відсутнє місцеве поздовжнє навантаження, тому ,  ,
,  ,
,  ,
, .
.
Склавши друге, п’яте та восьме рівняння рівноваги вузлів з таблиці 3 та урахувавши рівності , отримаємо:
 .
.
Аналогічно з одинадцятого, чотирнадцятого та сімнадцятого рівнянь рівноваги, урахувавши рівності та , отримаємо:
 ,
,
а із шостого та п’ятнадцятого рівнянь, урахувавши рівність , отримаємо рівняння:

Ці рівняння можна отримати одразу, якщо скласти рівняння рівноваги для частин рами, які відсікаються перетинами  (рисунок 3.18). Ці перетини перерізають тільки паралельні стержні, тому, склавши рівняння проекцій сил на перпендикуляр до цих стержнів, ми отримаємо рівняння, які не містять в собі поздовжніх сил.
(рисунок 3.18). Ці перетини перерізають тільки паралельні стержні, тому, склавши рівняння проекцій сил на перпендикуляр до цих стержнів, ми отримаємо рівняння, які не містять в собі поздовжніх сил.
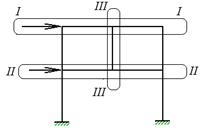
Рисунок 3.18 – Перетини, які перерізають тільки паралельні стержні
Таблиця 3.5 - Ескізи частин рами та умови рівноваги прикладу 4
| Ескіз частини рами з діючими на неї зусиллями | Умови рівноваги |
|

|
| 
|

| 
|
Таким чином, для визначення дев’яти невідомих ( ) отримано дев’ять рівнянь рівноваги, що не містять поздовжніх сил:
) отримано дев’ять рівнянь рівноваги, що не містять поздовжніх сил:
1.
2.
3.
4.
5.
6.
7.
8.
9.
Подальша робота по формуванню розв’язувальної системі рівнянь, обчисленню внутрішніх зусиль та побудові епюр виконується таким же чином, як і в прикладі пункту 3.3.2.