Основні залежності методу переміщень для прямолінійного стержня постійної жорсткості
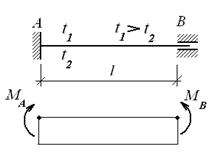
Для одержання основних залежностей методу переміщень розглянемо деформацію прямого стержня, який виділено із плоскої стержневої системи. На рисунку 2.1 зображено вихідне  й деформоване
й деформоване  положення стержня системи.
положення стержня системи.

Рисунок 2.1- Вихідне та деформоване положення стержня системи
Обмежимося системами з малими деформаціями з матеріалів, що підкоряються закону Гука. При виводі приймемо принцип незалежності поперечних і поздовжніх деформацій, тобто будемо вважати що поздовжні сили не впливають на величину поперечних деформацій, а згинальні моменти не впливають на величину поздовжніх деформацій. У цьому випадку диференціальні рівняння рівноваги прямого стержня мають вигляд:

При прийнятих допущеннях між внутрішніми зусиллями  й переміщеннями
й переміщеннями  й
й  існують залежності:
існують залежності:

Ураховуючи залежності (2.1) систему диференціальних рівнянь рівноваги прямого стержня в переміщеннях можна представити у вигляді:

де  – жорсткості стержня при розтяганні й вигині відповідно;
– жорсткості стержня при розтяганні й вигині відповідно;
 - компоненти переміщення перерізу, паралельні координатним осям
- компоненти переміщення перерізу, паралельні координатним осям  та
та  відповідно;
відповідно;
 – компоненти розподіленого навантаження, паралельні осям і відповідно.
– компоненти розподіленого навантаження, паралельні осям і відповідно.
Рішення системи рівнянь (2.3) можна представити у вигляді:

Використовуючи граничні умови

можна виразити постійні інтегрування  через переміщення кінцевих перерізів. З огляду на диференціальні залежності (2.2) та умови на границях:
через переміщення кінцевих перерізів. З огляду на диференціальні залежності (2.2) та умови на границях:

одержимо систему рівнянь, з якої знайдемо значення згинальних моментів, поперечних і поздовжніх сил на кінцях стержня :





де  – зусилля на кінцях
– зусилля на кінцях  та
та стержня від місцевого навантаження коли перерізи тастержня жорстко защемлені. Інші позначення в залежностях (2.7) відповідають рисунку 2.1.
стержня від місцевого навантаження коли перерізи тастержня жорстко защемлені. Інші позначення в залежностях (2.7) відповідають рисунку 2.1.
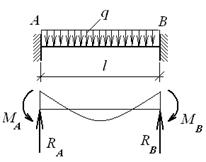
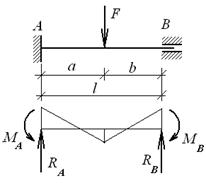
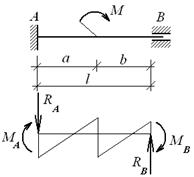
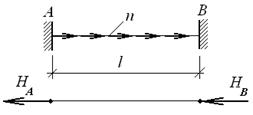
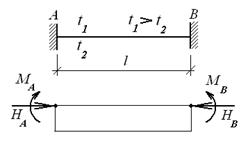
Значення легко можна визначити за допомогою таблиці 2.1, у якій наведено епюри та величини опорних реакцій для випадків навантаження стержня, які найчастіше зустрічаються на практиці. У більш складних випадках навантаження стержня для визначення цих величин слід скористатися методом сил, методом переміщень або методом початкових параметрів.
Таблиця 2.1 – Реакції балок постійного перерізу з двома защемленими кінцями
| Схема балки та вплив на неї | Реакції опор |
| 
|
| 
|
| 
|

| 
|

| 
|
Продовження таблиці 2.1
| Схема балки та вплив на неї | Реакції опор |
| 
|
| Напрям реакцій  та епюра моментів відповідає умові: та епюра моментів відповідає умові:  . Напрям реакцій . Напрям реакцій  відповідає умові: відповідає умові: 
|
| Напрям реакцій та епюра моментів відповідає умові:. 
|
Залежностями (2.7) визначаються кінцеві зусилля стержня коли відомі переміщення кінцевих перерізів та –  . Ці залежності надалі будемо називати основними залежностями методу переміщень для прямолінійного стержня в статиці стержневих систем у місцевій (локальній) системі координат.
. Ці залежності надалі будемо називати основними залежностями методу переміщень для прямолінійного стержня в статиці стержневих систем у місцевій (локальній) системі координат.
У практичних додатках зручніше користуватися залежностями, записаними для глобальної (загальної) системи координат. Як видно з рисунка 2.2, між компонентами переміщень кінцевих перерізів та , визначеними в локальній (місцевій) і в глобальній (загальній) системах координат, існують залежності:
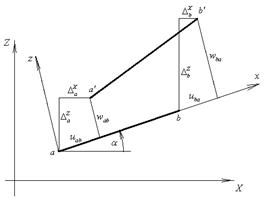
Рисунок 2.2 - До визначення зв’язку між компонентами переміщень визначеними в
локальній і в глобальній системах координат
З урахуванням залежностей (2.8) основні залежності методу переміщень (2.7) можна записати у вигляді:






У тому випадку, коли на одному із кінців стержня є шарнір (наприклад, на кінці ), для визначення трьох зусиль  ми маємо визначити чотири переміщення
ми маємо визначити чотири переміщення  . Щоб не розшукувати зайву невідому, виключимо кут повороту шарнірного кінця
. Щоб не розшукувати зайву невідому, виключимо кут повороту шарнірного кінця  . Для цього скористаємось тим, що в цьому випадку
. Для цього скористаємось тим, що в цьому випадку  Знайшовши з цієї умови та підставивши його в
Знайшовши з цієї умови та підставивши його в  отримаємо основні залежності методу переміщень для стержня із шарніром на кінці.
отримаємо основні залежності методу переміщень для стержня із шарніром на кінці.
У локальній системі координат кінцеві зусилля визначаються залежностями:


У переміщеннях глобальної системи координат визначаються залежностями:


