Складання розв’язувальної системи рівнянь для визначення основних невідомих
Розглянемо плоску рамну конструкцію. У довільному вузлі  рами можуть мати місце три переміщення: кут повороту
рами можуть мати місце три переміщення: кут повороту  , горизонтальне переміщення
, горизонтальне переміщення  й вертикальне переміщення
й вертикальне переміщення  . Коли система має
. Коли система має  незакріплених вузлів, вона має
незакріплених вузлів, вона має  невідомих переміщень, які і є основними невідомими методу. Якщо на вузли стержневої системи накладено
невідомих переміщень, які і є основними невідомими методу. Якщо на вузли стержневої системи накладено  в'язів, то число основних невідомих методу переміщень (ступінь кінематичної невизначеності) дорівнює
в'язів, то число основних невідомих методу переміщень (ступінь кінематичної невизначеності) дорівнює

На рисунку 2.13 показано вузол рами з пов'язаними з ним стержнями  .
.
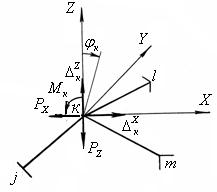
Рисунок 2.13 – Додатні напрямки координатних осей, зовнішнього навантаження  та компонентів переміщення вузла
та компонентів переміщення вузла
На вузол діють компоненти зовнішнього навантаження . На рисунку 2.13 показані додатні напрямки координатних осей і компоненти переміщення вузла . Кут повороту вузла додатний, якщо він спрямований проти руху годинникової стрілки при погляді з додатного кінця осі  . Лінійні переміщення
. Лінійні переміщення  й
й  додатні, якщо спрямовані уздовж відповідних осей
додатні, якщо спрямовані уздовж відповідних осей  та
та  .
.
На рисунку 2.14 показано вузол с додатним вузловим навантаженням, а також з кінцевими зусиллями стержнів, що примикають до вузла.
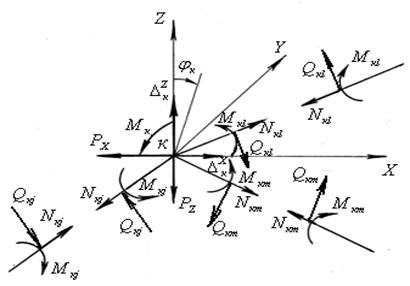
Рисунок 2.14 - Вузол с додатним вузловим навантаженням та з кінцевими зусиллями
стержнів, що примикають до вузла.
Для кожного вузла можна скласти стільки рівнянь рівноваги, скільки невідомих переміщень у вузлі. У загальному випадку вузол плоскої рами має 3 переміщення й для нього можна скласти 3 рівняння рівноваги:

Тут підсумовування поширюється на всі стержні, що сходяться у вузлі .
Величини  , що входять у рівняння (2.9), необхідно виразити за допомогою основних залежностей методу переміщень через компоненти переміщень вузлів. Склавши стільки рівнянь рівноваги, скільки є невідомих у намічених вузлах, і, виразивши зусилля, що ввійшли в них, через переміщення вузлів, одержимо розв’язувальну систему рівнянь методу переміщень.
, що входять у рівняння (2.9), необхідно виразити за допомогою основних залежностей методу переміщень через компоненти переміщень вузлів. Склавши стільки рівнянь рівноваги, скільки є невідомих у намічених вузлах, і, виразивши зусилля, що ввійшли в них, через переміщення вузлів, одержимо розв’язувальну систему рівнянь методу переміщень.