Приклад розрахунку стержневої системи методом переміщень
2.7.1 Розрахункова схема рами та її “еквівалентна” половина
Розглянемо методику складання розв’язувальної системи рівнянь методу переміщень та визначення зусиль на прикладі рами, розрахункову схему якої наведено на рисунку 2.15. Для подальших розрахунків візьмемо 
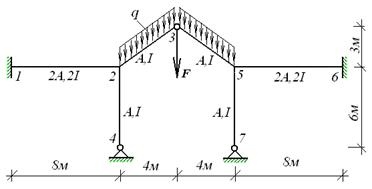
Рисунок 2.15 – Розрахункова схема рами
Вихідна рама симетрична й завантажена симетричним навантаженням, тому раціонально виконати розрахунок половини рами. “Еквівалентна” половина рами показана на рисунку 2.16.

Рисунок 2.16 - “Еквівалентна” половина розрахункової схеми
2.7.2 Вузли розрахункової схеми та основні невідомі методу переміщень
Мінімальне число вузлів цієї рами дорівнює чотирьом – опорні вузли та точка 2, де з’єднуються стержні 2-1, 2-3 та 2-4.
Число основних невідомих методу переміщень (ступінь кінематичної невизначеності СКН) визначається за формулою (2.12).

Невідомі переміщення вузлів цієї рами - . Якщо не розшукувати кути повороту перерізів, де є шарніри, кількість невідомих можна зменшити до чотирьох. Щоб не розшукувати кути поворотів перерізів, де є шарніри, слід користатися основними залежностями (2.10) та (2.11) для стержнів із шарніром на кінці. Невідомі переміщення вузлів рами, яку зображено на рисунку 2.16, наведено в таблиці 2.3.
. Якщо не розшукувати кути повороту перерізів, де є шарніри, кількість невідомих можна зменшити до чотирьох. Щоб не розшукувати кути поворотів перерізів, де є шарніри, слід користатися основними залежностями (2.10) та (2.11) для стержнів із шарніром на кінці. Невідомі переміщення вузлів рами, яку зображено на рисунку 2.16, наведено в таблиці 2.3.
Таблиця 2.3 - Невідомі переміщення вузлів рами
| Вузол | 
| 
| 
|

|  
| 
| |
 , можна не розшукувати , можна не розшукувати
| 
| ||
 , можна не розшукувати , можна не розшукувати
|
2.7.3 Рівняння рівноваги, які необхідно скласти для визначення основних невідомих
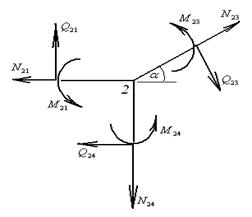
Найбільш прості рівняння рівноваги виходять, якщо розглядати рівновагу вузлів, у яких є невідомі переміщення. У таблиці 2.4 наведено ескізи вирізаних вузлів рами з діючими на них силами й записані умови рівноваги цих вузлів.
Таблиця 2.4 - Ескізи вузлів й умови рівноваги.
| Ескіз вирізаного вузла з діючими на нього зусиллями | Умови рівноваги вузла |
|



|

|


 Першим рівнянням слід скористатися якщо буде необхідність визначити кут повороту .
Останніх два рівняння рівноваги використовувати не слід, тому що вони містять невідомі реакції опори 4, які не визначаються через переміщення вузлів. Ці рівняння знадобляться, коли необхідно буде знайти реакції опори 4.
Першим рівнянням слід скористатися якщо буде необхідність визначити кут повороту .
Останніх два рівняння рівноваги використовувати не слід, тому що вони містять невідомі реакції опори 4, які не визначаються через переміщення вузлів. Ці рівняння знадобляться, коли необхідно буде знайти реакції опори 4.
|
Продовження таблиці 2.4
| Ескіз вирізаного вузла з діючими на нього зусиллями | Умови рівноваги вузла |

|
  Першим рівнянням слід скористатися якщо буде необхідно визначити кут повороту .
Друге рівняння рівноваги використовувати не слід через невідому реакцію
Першим рівнянням слід скористатися якщо буде необхідно визначити кут повороту .
Друге рівняння рівноваги використовувати не слід через невідому реакцію  , яка увійшла в це рівняння. , яка увійшла в це рівняння.
|
Таким чином, для визначення чотирьох невідомих переміщень вузлів  маємо чотири рівняння рівноваги вузлів, що містять тільки кінцеві зусилля стержнів, які виражаються через шукані переміщення:
маємо чотири рівняння рівноваги вузлів, що містять тільки кінцеві зусилля стержнів, які виражаються через шукані переміщення:
2.7.4 Формування розв’язувальної системи рівнянь для визначення основних невідомих
Використовуючи основні залежності методу переміщень (2.7), (2.9), (2.10), (2.11) виразимо кінцеві зусилля стержнів, які ввійшли в рівняння рівноваги (2.14), через переміщення вузлів.
При використанні формул (2.9) варто пам'ятати, що кут a відраховується від загальної (глобальної) осі  до місцевої (локальної) осі
до місцевої (локальної) осі  стержня, що розглядається, проти руху годинної стрілки (якщо дивитися з додатного кінця осі
стержня, що розглядається, проти руху годинної стрілки (якщо дивитися з додатного кінця осі  ).
).
Якщо початок місцевої системи координат розташовувати завжди на кінці стержня, який розглядається (перший індекс у позначенні зусилля), а вісь направляти від початку стержня до кінця (другий індекс), то із шести залежностей (2.9) нам знадобляться тільки перших три - .
.
Розглянемо техніку складання рівнянь рівноваги (2.14) у переміщеннях.
У перші три рівняння рівноваги увійшли зусилля на кінці 2 стержнів 2-1, 2-3, 2-4.
Стержень 2-1. 
Стержень 2-3. 
Стержень 2-4. 
У четверте рівняння рівноваги увійшли зусилля на кінці 3 стержня 3-2.
Стержень 3-2. 
Формування першого рівняння рівноваги:

Формування другого рівняння рівноваги:

Формування третього рівняння рівноваги:

Формування четвертого рівняння рівноваги:

Таким чином, для визначення чотирьох невідомих ми отримали чотири рівняння рівноваги в переміщеннях.
Увага! Матриця коефіцієнтів системи рівнянь методу переміщень має бути симетричною відносно головної діагоналі або вона легко робиться симетричною. Цей факт є наслідком теореми про взаємність реакцій. Він дозволяє помітити випадкові помилки, які зроблені при формуванні системи рівнянь.
Подальші розрахунки виконаємо для випадку, коли  Розділивши всі рівняння на
Розділивши всі рівняння на  та зробивши всі коефіцієнти на головній діагоналі додатними будемо мати таку систему рівнянь:
та зробивши всі коефіцієнти на головній діагоналі додатними будемо мати таку систему рівнянь:
Розв’язавши систему рівнянь (2.15) отримаємо:

Проаналізуйте отримані результати. Про що свідчать додатні та від’ємні значення результатів?
2.7.5 Визначення зусиль в кінцевих перерізах стержнів рами та побудова епюр зусиль
Користуючись основними залежностями методу переміщень обрахуємо зусилля в кінцевих перерізах стержнів. Явні вирази для обчислення зусиль майже для усіх кінцевих перерізів стержнів, окрім кінця 1 стержня 1-2, записані вище, тому докладно наводимо методику обчислень зусиль тільки для кінця 1 стержня 1-2, а для інших кінцевих перерізів - тільки остаточні результати.
Стержень 1-2, переріз 1.




Стержень 1-2, переріз 2.

Стержень 2-3, переріз 2.

Стержень 2-3, переріз 3.

Стержень 2-4, переріз 2.

Стержень 2-4, переріз 4.

Знаючи зусилля в кінцевих перерізах стержнів рами можемо побудувати епюри зусиль на тих стержнях, де відсутнє навантаження. Для того щоб побудувати епюри зусиль на стержнях, де є місцеве навантаження, треба цей стержень розглянути окремо, завантаживши його в кінцевих перерізах знайденими зусиллями та місцевим навантаженням. Так для нашого прикладу розрахункова схема стержня 2-3 матиме вигляд, який наведено на рисунку 2.17.

Рисунок 2.17 – До визначення зусиль в навантаженому стержні
За отриманими результатами будуємо епюри внутрішніх зусиль  (рисунок 2.18).
(рисунок 2.18).

Рисунок 2.18 - Епюри внутрішніх зусиль 
2.7.6 Контроль правильності епюр зусиль
Особливо уважно слід будувати епюри зусиль за отриманими результатами обчислень. Слід звернути увагу на те, що додатне значення знайденого зусилля відповідає тому напрямку, який був прийнятий при отриманні основних залежностей методу переміщень (рисунок 2.1).
Основною перевіркою (необхідною та достатньою) є статична перевірка побудованих епюр зусиль. Розрахунок методом переміщень виконано вірно якщо всі вузли споруди знаходяться в рівновазі. Якщо виявляється, що якийсь вузол неврівноважений, то помилку слід шукати в рівнянні, яке відповідає неврівноваженому вузлу.
Перевіримо, чи виконуються умови рівноваги вузла 2. Для цього нам необхідно вирізати вузол і завантажити його вузловим навантаженням, якщо воно є, та кінцевими зусиллями стержнів, які сходяться у вузлі, і скласти рівняння рівноваги. При цьому треба пам’ятати правила знаків, яких ми додержувалися, коли будували епюри: згинальні моменти побудовано із боку розтягнутих волокон, додатні поздовжні сили розтягують стержень, а додатні поперечні сили обертають вузол проти руху годинникової стрілки, якщо дивитися на вузол з боку осі .

|

 
|
Перевіримо рівновагу всієї рами.

Рисунок 2.19 – До перевірки рівноваги рами



Умови рівноваги вузла 2 та рами в цілому виконуються, тобто основні невідомі, зусилля в кінцевих перерізах, а також епюри правильні.