Уравнения функционирования электродвигателя постоянного тока с независимым возбуждением
Математическая модель, которая описывает функционирование электродвигателя постоянного тока с независимым возбуждением, может быть получена в виде следующих уравнений.
Уравнение баланса ЭДС:
 , (30)
, (30)
где  ,
,  и
и  – активное сопротивление и индуктивность якорной обмотки и конструктивный параметр электродвигателя, соответственно;
– активное сопротивление и индуктивность якорной обмотки и конструктивный параметр электродвигателя, соответственно;  ,
,  ,
,  ,
,  – напряжение, ток, поток в магнитном зазоре и скорость вращения якоря электродвигателя, соответственно. Второе слагаемое в правой части (30)
– напряжение, ток, поток в магнитном зазоре и скорость вращения якоря электродвигателя, соответственно. Второе слагаемое в правой части (30)  принято называть противо-ЭДС, так как это слагаемое имеет размерность ЭДС и вычитается из приложенного к якорю двигателя напряжения
принято называть противо-ЭДС, так как это слагаемое имеет размерность ЭДС и вычитается из приложенного к якорю двигателя напряжения  .
.
Отметим, что уравнение (30) фактически является вариантом закона Ома, так как  , где
, где  – общее (активное и реактивное, т.е. омическое и индуктивное) сопротивление якоря электродвигателя.
– общее (активное и реактивное, т.е. омическое и индуктивное) сопротивление якоря электродвигателя.
Уравнение баланса моментов, соответствующее второму закону Ньютона для вращательного движения:
 , (31)
, (31)
где  – параметр, равный приведенному к валу двигателя моменту инерции всех вращающихся частей.
– параметр, равный приведенному к валу двигателя моменту инерции всех вращающихся частей.  ;
;  – электромагнитный момент, развиваемый двигателем;
– электромагнитный момент, развиваемый двигателем;  – магнитный поток обмотки возбуждения;
– магнитный поток обмотки возбуждения;  – ток в цепи якоря;
– ток в цепи якоря;  – момент всех сопротивлений на валу двигателя, включая приведенные;
– момент всех сопротивлений на валу двигателя, включая приведенные;  – конструктивный параметр двигателя.
– конструктивный параметр двигателя.
Таким образом, математическая модель электродвигателя в общем случае с учетом принятых обозначений может быть записана в виде системы нелинейных дифференциальных уравнений, если их разрешить относительно производных, т.е. представить в форме Коши:
 (32)
(32)
где  – ток в обмотке возбуждения двигателя.
– ток в обмотке возбуждения двигателя.
Математическая модель (32) может быть представлена и в виде структурной схемы рис. 7.
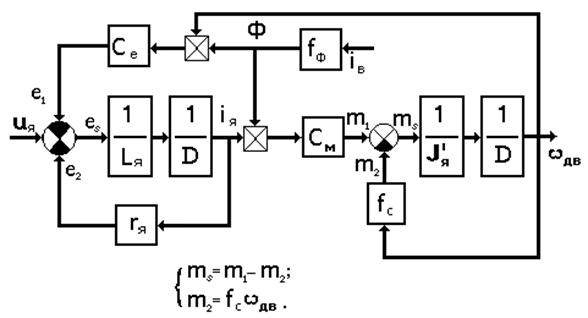 |
Рис. 7. Общая структурная схема двигателя постоянного тока, соответствующая нелинейной математической модели (31). Символ  представляет собой операцию умножения переменных.
представляет собой операцию умножения переменных.
Возможность применения для исследований функционирования исполнительного двигателя и всей простейшей динамической системы управления уравнений (32) ограничена из-за наличия следующих нелинейностей (см. рис. 7):
1) двух нелинейностей в виде произведения переменных в слагаемых  ,
,  ;
;
2) нелинейной зависимости от относительной скорости  момента сил сухого трения (23);
момента сил сухого трения (23);
3) нелинейной зависимости магнитного потока от тока возбуждения двигателя  .
.
В то же время на первом этапе обычно решаются такие важнейшие вопросы функционирования систем, как их устойчивость (устойчивость системы “в малом”). Для этого следует рассматривать линейное приближение уравнений (32), получаемое в результате операций линеаризации. На рассматриваемом примере покажем некоторые простейшие приемы такой линеаризации.