Передаточные функции и структурные схемы электродвигателя постоянного тока с независимым возбуждением
Общая структурная схема двигателя постоянного тока, соответствующая нелинейной математической модели (32), приведена на рис. 7. Она содержит информацию об основных нелинейностях статических характеристик электродвигателя.
В результате линеаризации момента “сухого” трения, а также с учетом того, что для двигателя постоянного тока с независимым возбуждением справедливо утверждение о постоянстве магнитного потока
 , (46)
, (46)
и  ,
,  , перепишем систему уравнений (32) в виде
, перепишем систему уравнений (32) в виде
 (47)
(47)
Система уравнений (47) линейная и ей соответствует структурная схема, представленная на рис. 9.
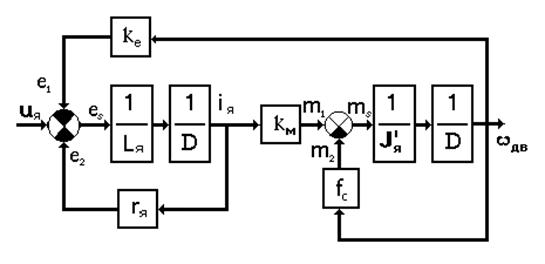 |
Рис. 9. Структурная схема электродвигателя постоянного тока с независимым возбуждением, соответствующая системе уравнений (47)
Подчеркнем, что широко применяемые на практике электродвигатели постоянного тока с независимым возбуждением имеют большие скорости вращения ротора и изготавливаются с достаточно малыми моментами трения на оси вращения. Поэтому не только значение собственного момента трения на оси двигателя, но и приведенная к этой оси составляющая момента трения на оси объекта управления из-за больших значений передаточного отношения редуктора пренебрежимо малы в сравнении с развиваемым электромеханическим моментом. Следовательно, в первом приближении можно считать, что  или даже
или даже  .
.
Тогда система уравнений (47) может быть записана в виде
 (48)
(48)
а структурная схема после соответствующих преобразований сведется к схеме рис. 10.
Преобразование структурной схемы, представленной на рис. 10а, к виду динамического звена, представленного на рис. 10б, заключается в следующем. Два последовательных звена заменяются одним, оператор которого есть произведение операторов этих последовательных звеньев.
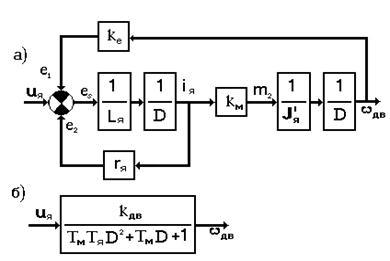 |
Рис. 10. Структурная схема электродвигателя постоянного тока с независимым возбуждением: а) при
 ; б) та же схема, преобразованная к виду динамического звена
; б) та же схема, преобразованная к виду динамического звена
Таким образом, два последовательно включенных звена с операторами  и
и  заменяются одним звеном с оператором,
заменяются одним звеном с оператором,  ,а три последовательно включенных звена с операторами
,а три последовательно включенных звена с операторами  ,
,  и заменяются одним звеном с оператором
и заменяются одним звеном с оператором  .
.
Звено, охваченное обратной связью, заменяется одним звеном с оператором, который определяется по следующему правилу:
 , (49)
, (49)
где  – оператор звена, которое охвачено обратной связью,
– оператор звена, которое охвачено обратной связью,  – оператор звена в цепи обратной связи.
– оператор звена в цепи обратной связи.
После преобразований получены выражения для электромеханической постоянной времени и электромагнитной постоянной времени электродвигателя постоянного тока с независимым возбуждением. Они равны:
 (50)
(50)
и
 , (51)
, (51)
соответственно. Кроме того, получено выражение коэффициента передачи электродвигателя:
 . (52)
. (52)
В дальнейшем оператор дифференцирования  в передаточных функциях заменяется оператором Лапласа
в передаточных функциях заменяется оператором Лапласа  . Например, передаточная функция электродвигателя постоянного тока с независимым возбуждением может быть записана двумя способами:
. Например, передаточная функция электродвигателя постоянного тока с независимым возбуждением может быть записана двумя способами:
 (53)
(53)
или
 . (54)
. (54)
Следует иметь в виду, что формулы (50) – (54) можно использовать только при сделанном выше допущении о возможности пренебречь коэффициентом эквивалентного вязкого трения  . В противном случае формулы (53) и (54) перепишутся следующим образом:
. В противном случае формулы (53) и (54) перепишутся следующим образом:
 (55)
(55)
 . (56)
. (56)
Для определения выражений коэффициентов в формулах (55) и (56) проведем несколько последовательных преобразований структурных схем. Схема рис. 9 преобразуется к виду рис. 11 с заменой оператора дифференцирования оператором  и последовательно соединенных звеньев одним звеном с передаточными функциями
и последовательно соединенных звеньев одним звеном с передаточными функциями  и
и  , соответственно.
, соответственно.
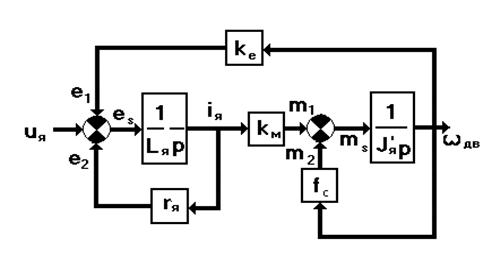 |
Рис. 11. Структурная схема электродвигателя постоянного тока с независимым возбуждением при первом преобразовании
Структурная схема рис. 11 преобразуется к виду рис. 12, на котором показано приведение двух звеньев, охваченных местными обратными связями к двум, включенным последовательно с третьим –  .
.

Рис. 12. Структурная схема электродвигателя постоянного тока с независимым возбуждением при втором преобразовании
Затем - к виду рис. 13, на котором остается только одно звено, охваченное местной обратной связью –  .
.
Рис. 13. Структурная схема электродвигателя постоянного тока с независимым возбуждением при третьем преобразовании
И, наконец, к окончательному виду рис. 14 с передаточной функцией (55), где коэффициенты (параметры передаточной функции) соответственно равны:
 и при
и при 
 . (57)
. (57)
и при 
 . (58)
. (58)
 |
Рис. 14. Структурная схема электродвигателя постоянного тока с независимым возбуждением, соответствующая его представлению одним динамическим звеном при наличии трения, т.е. 
Рассмотрим более подробно задачу использования предложенных математических моделей электродвигателя постоянного тока с независимым возбуждением в виде структурных схем и передаточных функций при анализе и синтезе динамической системы с таким исполнительным двигателем.
С этой целью получим математическую модель простейшей динамической системы управления. Вначале выберем для нее чувствительный элемент.