Устойчивость простейшей динамической системы управления по линейному приближению ее математической модели
Если использовать полученную структурную схему динамической системы управления с исполнительным электродвигателем постоянного тока с независимым возбуждением без учета средств коррекции (см. рис. 17), то передаточная функция этой системы управления в замкнутом состоянии по ошибке (9) примет следующий вид:
 (60)
(60)
или при достаточно малом трении на объекте и на валу исполнительного двигателя, т.е. при  :
:
 . (61)
. (61)
В соответствии с известным алгебраическим критерием Раута-Гурвица, для того чтобы система управления, функционирование которой описывает математическая модель в виде передаточной функции (60) или (61), необходимо и достаточно выполнение следующих условий. Во-первых, все коэффициенты характеристического полинома в (60) или (61) должны быть с одним знаком, например, положительными. И, во-вторых, должно соблюдаться неравенство вида
 или
или  . (62)
. (62)
Если заданными требованиями к функционированию динамической системы управления предусмотрено обеспечение величины максимальной скорости отработки: ;  , максимальной допустимой ошибки
, максимальной допустимой ошибки  , то можно определить добротность этой системы управления по скорости, равную:
, то можно определить добротность этой системы управления по скорости, равную:
 . (63)
. (63)
Таким образом, для выполнения требований к системе по скорости должно быть обеспечено условие  .
.
Аналогично, если требованиями к функционированию динамической системы управления предусмотрено обеспечение величины максимального ускорения отработки:  при той же заданной максимальной допустимой ошибки
при той же заданной максимальной допустимой ошибки  , можно определить добротность этой системы управления по ускорению:
, можно определить добротность этой системы управления по ускорению:
 . (64)
. (64)
Но для этого необходимо с учетом (62) выполнения условия:
 . (65)
. (65)
Далее отметим, что динамическая система управления с электродвигателем постоянного тока с независимым возбуждением без средств коррекции структурно устойчива. Иными словами, всегда можно выбрать коэффициент усиления в прямой цепи системы, отвечающий условию (65).
Однако для обеспечения устойчивости в этом случае необходимо, чтобы электромагнитная постоянная времени  была достаточно малой. Практически такое условие невыполнимо.
была достаточно малой. Практически такое условие невыполнимо.
С другой стороны, применяя известную предельную теорему к (60) или (61), можно определить величины статической и скоростной ошибок рассматриваемой динамической системы управления.
Статическую ошибку определяет условие постоянства входного сигнала:
 . (66)
. (66)
При этом
 , (67)
, (67)
так как  ,
,  и
и  .
.
Такую динамическую систему управления принято называть астатической первого порядка.
Напомним, что порядок астатизма определяется показателем степени  в знаменателе передаточной функции в разомкнутом состоянии (6).
в знаменателе передаточной функции в разомкнутом состоянии (6).
Скоростную ошибку определяет условие постоянства задаваемой скорости:
 . (68)
. (68)
При этом
 .(69)
.(69)
Таким образом, скоростная ошибка динамической системы управления с астатизмом первого порядка прямо пропорциональна задаваемой скорости  и обратно пропорциональна коэффициенту усиления разомкнутой системы
и обратно пропорциональна коэффициенту усиления разомкнутой системы 
Очевидно, что, для того чтобы при некоторой максимальной постоянной задаваемой скорости  ошибка системы не превышала заданной, необходимо, чтобы коэффициент усиления в прямой цепи динамической системы был не менее ее добротности (63). Нетрудно убедится, что практически всегда это приводит к нарушению условий (62), а величина действительной ошибки при постоянной максимальной скорости всегда оказывается равной:
ошибка системы не превышала заданной, необходимо, чтобы коэффициент усиления в прямой цепи динамической системы был не менее ее добротности (63). Нетрудно убедится, что практически всегда это приводит к нарушению условий (62), а величина действительной ошибки при постоянной максимальной скорости всегда оказывается равной:
 . (70)
. (70)
Для уменьшения этой ошибки за счет обеспечения возможности поднять коэффициент усиления в прямой цепи динамической системы и применяются различные средства коррекции. Процесс синтеза средств коррекции называют процессом выбора законов управления этой динамической системы.
Выбор законов управления обеспечивается следующими способами:
1) введением в закон управления первой и более высоких производных от угла поворота исполнительной оси (объекта управления) с помощью местных отрицательных обратных связей;
2) использованием звена последовательной коррекции;
3) введением в закон управления первой и более высоких производных от угла рассогласования (ошибки) с помощью местных отрицательных обратных связей и компенсационных сигналов, пропорциональных первой и более высоким производным от угла поворота командной оси.
На структурной схеме рис. 16 первому способу соответствуют цепи с коэффициентами передачи  , второму - звено с передаточной функцией
, второму - звено с передаточной функцией  , третьему - цепи с коэффициентами передачи
, третьему - цепи с коэффициентами передачи  и
и  .
.
В качестве примера покажем, как это сказывается на функционировании динамической системы управления с передаточной функцией (60), т.е. когда коэффициент трения  .
.
Вначале представим структурную схему рис. 17 в виде рис 18.
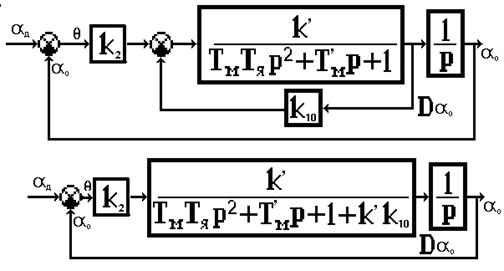 |
Рис.18. Структурная схема с введение первой производной 
Очевидно, что в этом случае передаточная функция системы в разомкнутом состоянии с учетом местной обратной связи примет вид
 . (71)
. (71)
Передаточная функция этой системы управления в замкнутом состоянии по ошибке (9) запишется как
 . (72)
. (72)
Неравенство (62) преобразуется к виду
 ., (73)
., (73)
а условие устойчивости (63) динамической системы управления в зависимости от значения  :
:
 . (74)
. (74)
Таким образом, полученное соотношение (74) позволяет определить значение коэффициента  в цепи обратной связи, которое гарантирует устойчивость динамической системы с электродвигателем постоянного тока с независимым возбуждением в качестве исполнительного двигателя при соответствующем увеличении значения коэффициента усиления
в цепи обратной связи, которое гарантирует устойчивость динамической системы с электродвигателем постоянного тока с независимым возбуждением в качестве исполнительного двигателя при соответствующем увеличении значения коэффициента усиления  в прямой цепи.
в прямой цепи.
Так, если выбрать величину коэффициента обратной связи (74)
 , (75)
, (75)
а в пределе
 , (76)
, (76)
соответственно, то система управления останется устойчивой при сколь угодно большом коэффициенте усиления:
 . (77)
. (77)
При этом установившаяся статическая ошибка останется равной нулю, а скоростная определится из того, что
 . (78)
. (78)
Первое слагаемое этой ошибки может быть уменьшено за счет выбора достаточно большого коэффициента усиления  , а второе мало потому, что коэффициент обратной связи по скорости
, а второе мало потому, что коэффициент обратной связи по скорости  по абсолютной величине также мал, а крутизна чувствительного элемента обычно больше единицы.
по абсолютной величине также мал, а крутизна чувствительного элемента обычно больше единицы.
Аналогичный результат может быть получен при введении в закон управления второй производной от угла поворота исполнительной оси. Покажем это также на примере, когда коэффициент трения  . Структурная схема для этого случая примет вид рис. 19.
. Структурная схема для этого случая примет вид рис. 19.

Рис. 19. Структурная схема с введение второй производной 
Передаточная функция (70) с учетом отрицательной местной обратной связи в этом случае примет вид:
 , (79)
, (79)
а передаточная функция системы в замкнутом состоянии по ошибке (74)
 . (80)
. (80)
Условие устойчивости (63) динамической системы управления в зависимости от значения  определится из неравенства
определится из неравенства
 , (81)
, (81)
откуда:
 ., (82)
., (82)
Тогда, если выбрать величину коэффициента обратной связи
 , (83)
, (83)
а в пределе
 , (84)
, (84)
соответственно, то система управления останется устойчивой при сколь угодно большом коэффициенте усиления:
. (85)
При этом установившаяся статическая ошибка останется равной нулю, а скоростная определится из того, что
 (86)
(86)
и, следовательно, может стать сколь угодно малой с ростом  , так как всегда справедливо
, так как всегда справедливо  .
.