рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Сигналов
Реферат Курсовая Конспект
Сигналов
Сигналов - раздел Образование, ПРИЕМНЫЕ УСТРОЙСТВА РЛС РТВ 4.5.1. Назначение И Классификация Накопителей Рл Сигналов....
4.5.1. Назначение и классификация накопителей РЛ сигналов.
Как указывалось, особенностью радиолокационного обнаружителя является то, что решение о наличии сигнала принимается по пачке импульсов, а не по каждому отдельному импульсу. Поэтому в составе приемного устройства должен быть согласованный фильтр не только для одиночного импульса, но и для пачки радиоимпульсов. Этот фильтр называют также накопителем радиолокационных сигналов.
Накопление (интегрирование) отраженных импульсов можно производить либо до детектора (когерентно, т.е. с учетом тонкой структуры сигнала), либо после детектора (некогерентно, т.е. без учета фазы сигнала). Некогерентное накопление менее эффективно, чем когерентное, но во многих случаях оно проще реализуется. В некоторых типах РЛС (например, 19Ж6) осуществляется смешанное интегрирование: часть импульсов пачки интегрируется когерентно, а затем выходные импульсы когерентного накопителя после детектирования интегрируются некогерентным накопителем.
Накопители радиолокационных сигналов можно классифицировать следующим образом:
1. По виду накопления: когерентные накопители; некогерентные накопители.
2. По числу каналов (дальности, скорости): одноканальные; многоканальные.
3. По принципу построения: на линиях задержки с отводами через период повторения; на узкополосных фильтрах (фильтровые накопители);
на узкополосных фильтрах с временной селекцией (корреляционо-фильтровые накопители); на линиях задержки с обратной связью (рециркуляторы); на интегрирующих потенциалоскопах; на электронно-лучевых трубках; цифровые накопители; оптические накопители.
4. По числу ступеней накопления: одноступенчатые; многоступенчатые.
Наиболее широкое применение в РЛС обнаружения находят рециркуляторы, накопители на базе электронно-лучевых трубок и цифровые накопители.
4.5.2 Когерентные накопители
Ознакомимся со способами накопления энергии когерентной пачки импульсов, в которой фазы импульсов изменяются по регулярному закону.

Накопление энергии такой пачки можно осуществить по различным схемам; на радио (промежуточной) или видеочастоте. В первом случае (рис.4.18) отклики фильтра, согласованного с одиночным импульсом пачки (СФОИ), поступают в когерентный накопитель, состоящий из линии задержки (ЛЗ) с отводами по числу "n" импульсов в пачке и сумматора. Задержка между отводами линии задержки выбирается так, чтобы импульсы, следующие с периодом повторения Тп , суммировались синфазно.
Ясно, что такое когерентное суммирование возможно благодаря регулярности фазы в когерентной пачке.
При практической реализации когерентного накопления возможны существенные затруднения. Во избежании нарушения синфазности суммируемых импульсов погрешность ЛЗ не должна превышать малой доли периода несущей частоты. Вместе с тем задержка в ЛЗ во многих случаях оказывается весьма большой (например, при n = 11, Тп = 1мC, tз = (n-1)Tп = 10мC), а требования к точности и стабильности ЛЗ - чрезвычайно жесткими.
Требования к точности ЛЗ существенно упрощаются при накоплении энергии импульсов пачки на видеочастоте. Погрешности ЛЗ в этом случае должны быть малыми по сравнению с длительностью импульса, а не периодом несущего колебания. Это означает снижение требований к точности ЛЗ на 2...3 порядка. Для преобразования радиосигнала на видеочастоту используется синхронное детектирование, позволяющее учесть регулярную связь между фазами импульсов когерентной пачки.
Синхронное детектирование осуществляется в двух квадратурных каналах с помощью фазовых детекторов (ФД) и опорного гетеродина (ОГ) (рис.4.19). Частота ОГ выбирается равной ожидаемой промежуточной частоте сигнала.
Разность фаз принимаемого сигнала и колебания ОГ является случайной величиной. Однако вследствие когерентности сигнала эта разность фаз одинакова для всех импульсов пачки при условии равенства частот сигнала и ОГ. В таком случае видеоимпульсы пачки на выходе ФД и в отводах ЛЗ имеют одинаковую полярность. Поэтому они суммируются в сумматоре. Вышесказанное иллюстрируется эпюрами напряжений рис.4.20. Очевидно, что амплитуда центрального импульса выходного сигнала возрастает пропорционально числу импульсов в пачке "n".
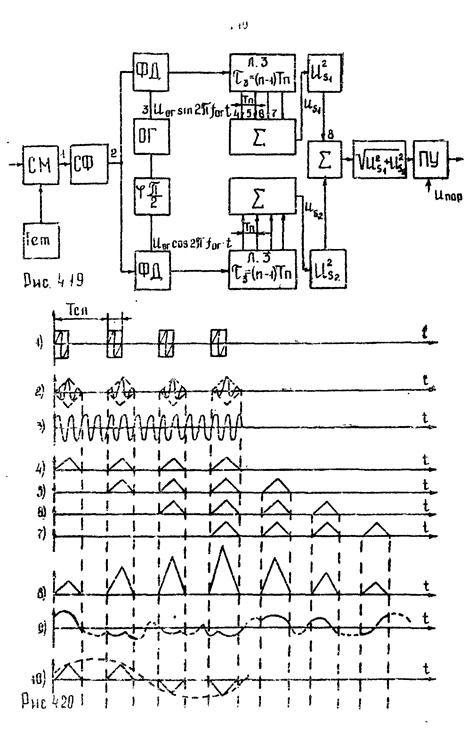
Значения разности фаз помехи и колебания ОГ в моменты времени, разнесенные на период Тп, случайны и независимы. Поэтому амплитуды "импульсов" помехи в отводах ЛЗ в отличие от сигнала оказываются разнополярными (см.рис.4.20(9)). При суммировании в сумматоре помеха частично компенсируется. Можно показать, что дисперсия помехи в сумматоре увеличивается в "n" раз, а амплитуда в  раз. В результате отношение сигнал/помеха повышается пропорционально раз.
раз. В результате отношение сигнал/помеха повышается пропорционально раз.
Выходные сигналы сумматоров Us1 и Us2 возводятся в квадрат. Сигнал на выходе приемника будет равен
Uвых = 
Ожидаемое значение доплеровского смещения частоты Fдо учитывается при выборе частоты ОГ. При движении цели с неизвестной скоростью доплеровская частота Fд может отличаться от ожидаемой Fдо. При этом начальные фазы радиоимпульсов принимаемого сигнала получают от импульса к импульсу дополнительный неучтенный сдвиг фазы Df = 2p×(Fд - Fдо)×Тп. Вследствие этого видеоимпульсы на выходе ФД оказываются промодулированными по амплитуде разностной частотой F= ½Fд - Fдо½. Эта модуляция приводит к уменьшению сигналов Us1 и Us2 в каналах и выходного сигнала Uвых. В случае если период разностной частоты 1/F становится равным длительности пачки импульсов Т = n×Тп, то наступает взаимная компенсация модулированных импульсов пачки в сумматорах. Результат накопления будет близок к нулю. Сигнал на выходе ФД для этого случая показан на рис.4.20(10).
Таким образом, сигналы, отличающиеся по частоте на величину dF=1/T, разрешаются по скорости.
Если диапазон возможных значений доплеровской частоты Fдмах -Fдmin превышает разрешающую способность, то накопитель должен быть многоканальным "по скорости". В каждом из N = (Fдmax - Fдmin)/dF каналов такого накопителя ОГ настраиваются на различные значения частоты, причем шаг по частоте выбирается fог i+1 - fог i = dF .
В когерентных РЛС предъявляются жесткие требования к стабильности частоты гетеродина приемника, а также СВЧ - генераторов передатчика. Уход частоты этих генераторов приводит к модуляции амплитуд видеоимпульсов на выходе ФД и к соответствующему уменьшению сигнала накопителя. Относительная нестабильность частоты не должна превышать 10-7 ....10-9.
4.5.3 Некогерентные накопители
В накопителе некогерентной пачки импульсов (рис.4.21) вследствие случайности начальной фазы каждого из импульсов пачки осуществить непосредственное суммирование радиоимпульсов не представляется возможным. Поэтому операции накопления предшествуют детектирование сигнала. Полученные с помощью амплитудного детектора видеоимпульсы синхронно суммируются в сумматоре.

К некогерентному накопителю предъявляются менее жесткие требования к точности и стабильности. Так как на выходе согласованного фильтра (УПЧ) устанавливается амплитудный детектор (АД), то соотношение фаз импульсов принимаемого сигнала и гетеродина не имеет значения. Поэтому упрощаются требования к стабильности частоты местного гетеродина (ориентировочно на три порядка ниже, чем в когерентном накопителе). Уходы частоты гетеродина в этом случае должны быть малыми по сравнению с шириной полосы пропускания приемника.
Вместе с тем некогерентным накопителям присущи существенные недостатки. В них теряется информация о скорости движения целей. Кроме того они обладают более низкой чувствительностью по сравнению с когерентными.
4.5.4 Принцип построения рециркулятора
Основными элементами рециркулятора являются линия задержки на Тп и сумматор (рис.4.22). Накопление импульсов в рециркуляторе обеспечивается в результате суммирования поступившего очередного импульса пачки с суммой импульсов, возвратившихся на вход по цепи обратной связи и полученных на предшествующих этапах работы устройства. Для предотвращения самовозбуждения коэффициент обратной связи выбирается Кос < 1.

В качестве устройства задержки в рециркуляторах могут использоваться потенциалоскопы, ультразвуковые линии задержки, магнитные барабаны или диски. Запись сигналов на магнитный барабан (диск) сопряжена с механическим перемещением магнитного носителя относительно записывающих и считывающих головок. Скорость этого перемещения должна поддерживаться с весьма высокой точностью, что оказывается затруднительным на практике. Кроме того, при записи на магнитный материал и на мишень потенциалоскопа возникают специфические искажения: растягивание записываемого импульса по длительности, засорение соседних участков экрана вторичными электронами. При этом ухудшается разрешающая способность РЛС и возрастает уровень помех.
Эти особенности и должны приниматься во внимание при определении целесообразности использования тех или иных аналоговых устройств задержки. Лучшие качественные показатели рециркулятора обеспечиваются при использовании ультразвуковых линий задержки.
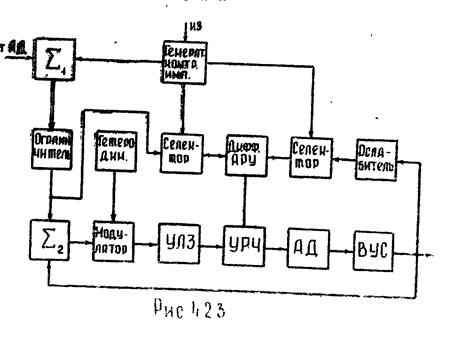
В этом случае накопление импульсов пачки осуществляется в сумматоре 2 (рис.4.23). На один из его входов поступают видеоимпульсы от амплитудного детектора (АД) приемника (через сумматор 1 и ограничитель). Включение ограничителя перед интегратором достигает двух целей: во-первых, единичные импульсные помехи не создают на выходе рециркулятора заметного отклика и, во-вторых, сильные сигналы не выходят за границы динамического диапазона цепей рециркулятора, что привело бы к их перегрузке. На второй вход сумматора подаются видеоимпульсы с выхода видеоусилителя (ВУС) цепи обратной связи. УЛЗ осуществляет задержку каждого импульса пачки на период повторения. Кварцевый гетеродин и модулятор обеспечивают перенос спектра интегрируемых видиосигналов в диапазон рабочих частот УЛЗ.
УРЧ (усилитель радиочастоты) предназначен для компенсации ослабления сигнала в УЛЗ. В нем должны быть предусмотрены каскады, обеспечивающие возможность регулировки коэффициента усиления в заданном динамическом диапазоне с требуемой точностью. Амплитудный детектор (АД) в цепи обратной связи осуществляет обратное преобразование выходных радиоимпульсов УРЧ в видеоимпульсы.
Для устранения возможности как самовозбуждения, так и снижения эффективности рециркулятора применяют автоматическую регулировку усиления цепи обратной связи. Наиболее эффективной является схема импульсной дифференциальной АРУ (ДАРУ).
Автоматическое поддержание номинального значения коэффициента обратной связи осуществляется следующим образом. Генератор контрольных импульсов вырабатывает контрольные импульсы (пилот-сигналы), которые поступают на один из входов схемы дифференциальной АРУ (через сумматор 1, ограничитель и селектор). На второй вход схемы поступают эти же контрольные импульсы, задержанные в УЛЗ.
Амплитуда входного контрольного видеоимпульса сравнивается с амплитудой ослабленного в 1/(1- bо) раз контрольного импульса (bо - номинальное значение коэффициента обратной связи). При нормальной работе амплитуды одинаковы. Отклонение коэффициента обратной связи от номинального значения изменяет величину накопленного сигнала, ввиду чего равенство амплитуд нарушается. При этом на выходе вычитающего устройства схемы ДАРУ вырабатывается напряжение, которое интегрируется и используется для управления величиной коэффициента усиления УРЧ.
Схема ДАРУ работает в специально выделенном временном канале (либо в начале дистанции, либо в конце), свободном от действия выходных сигналов приемника. Временной канал выделяется путем подачи управляющих импульсов на временные селекторы в моменты поступления на вход рециркулятора контрольных импульсов.
4.5.5. Принципы построения цифровых устройств накопления
радиолокационных сигналов
При использовании цифровых методов представляется возможным избежать многих трудностей, связанных с разработкой и эксплуатацией аналоговых накопителей энергии пачек импульсов. Запоминающие устройства (ЗУ) современных ЭВМ имеют большой объем памяти при умеренных массе и габаритах. Параметры цифровых устройств практически не подвержены дестабилизирующему воздействию окружающей среды. Благодаря этому успешно решается наиболее трудная проблема создания высокостабильной и длительной задержки сигналов.
Цифровые накопители (интеграторы) могут применяться как в когерентных, так и в некогерентных РЛС, совместно с цифровыми или аналоговыми согласованными фильтрами. В последнем случае видеосигнал на выходе согласованного фильтра или детектора преобразуется в цифровую форму с помощью АЦП. Шаг дискретизации выбирается обычно равным длительности импульса сигнала на выходе приемника. Период следования Тп зондирующих импульсов разбивается на Nд= Тп /tи равных интервалов. Ясно, что число возможных градаций дальности также составляет NД. Разрешение по времени не может быть меньше tи, а разрешение по дальности dД = с×tи/2.

Образованная в АЦП последовательность "в"- разрядных двоичных чисел (цифровой эквивалент сигнала) с интервалом tи поступает в блок памяти (БП) (рис.4.24). Блок памяти выполняет функции, подобные линии задержки в аналоговом накопителе видеоимпульсов. Числа входной последовательности хранятся в БП в течение времени (n-1)Тп и после чего сбрасываются. АЦП и БП управляются тактовыми импульсами от единого генератора системы синхронизации. В каждом такте работы устройства, подобно отводам линии задержки аналогового накопителя, из БП с интервалом Тп извлекаются n-1 чисел, которые совместно с очередным отсчетом входного потока поступают в сумматор. Все эти числа соответствуют одному и тому же k-му элементу разрешения по дальности. Если сумма превышает установленный порог, то принимается решение о наличии сигнала в k-м элементе разрешения. При этом одновременно фиксируется время запаздывания сигналов tз = k×tи и дальность до цели Д = c×k×tи/2.
Блок памяти может быть выполнен на элементах памяти различных видов. Использование сдвиговых регистров позволяет построить во многих случаях весьма удобное устройство памяти. Вместе с тем оптимальные цифровые интеграторы при больших количестве импульсов в пачке n и разрядности чисел "в" оказываются громоздкими устройствами.

При бинарном квантовании (в=1) квантованный сигнал может принимать одно из двух значений: 0 или 1. Потери в отношении сигнал/шум при этом по сравнению с многоуровневым квантованием составляют порядка двух децибел.
Бинарный квантователь представляет собой пороговое устройство. Если выходное напряжение приемника превышает порог, то квантованно-му сигналу присваивается значение 1 и на соответствующем интервале дискретизации создается стандартный импульс. Если выходное напряжение приемника ниже порога, то ему присваивается нуль и указанный импульс отсутствует (рис.4.25). Квантованный сигнал представляет собой последовательность нулей и единиц. Наличие и отсутствие пачки импульсов сигнала при бинарном квантовании различаются лишь плотностью единиц в этой последовательности.
При бинарном квантовании построение обнаружителя существенно упрощается (рис.4.26). Устройство содержит один сдвиговый регистр. Число единиц, хранящихся в памяти (в регистре), пропорционально их плотности в потоке отсчетов сигнала. Функции сумматора и порогового устройства выполняет логическая комбинационная схема, которая представляет собой логическую схему совпадения " m из n".
Максимальное число единиц (импульсов), поступающих со сдвигового регистра на схему совпадения в некотором шаге дискретизации по времени, не превышает числа импульсов в пачке ²n². Если величина порога m, то схема совпадения принимает решение о наличии сигнала каждый раз, когда на ее входы ²i² поступает ²m² или больше импульсов. Если число импульсов меньше, то полагается, что сигнал отсутствует. Физически "решением" является возникновение стандартного импульса на выходе схемы совпадения. В этом состоит алгоритм цифрового обнаружения методом "m из n". Наиболее просто реализуется устройство для алгоритма "n из n"
Бинарные обнаружители по сравнению с многоуравневыми имеют весьма простую схему и конструкцию.
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ ...................................................................................................... 3
1. РАДИОЛОКАЦИОННАЯ СИСТЕМА РТВ. ОСНОВНЫЕ
ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ СРЕДСТВ
РАДИОЛОКАЦИИ ............................................................................... 3
1.1. Радиолокационная система РТВ как большая система .............. 3
1.2. Внешняя среда радиолокационной системы ............................. 11
1.2.1. Характеристика радиолокационных целей ....................................... 11
1.2.2. Характеристика мешающих отражателей ......................................... 15
1.2.3 Характеристика внешних излучателей ............................................... 16
1.3. Классификация СРЛ РТВ ................................................................... 17
1.4. Основные тактико-технические характеристики СРЛ РТВ ......... 20
1.5. Обобщенная структурная схема РЛС ................................................ 27
1.6. Общие сведения о системе САЗО. Принципы построения систем
САЗО ........................................................................................................ 32
1.6.1. Назначение, состав и принцип функционирования системы с
активным запросом-ответом ............................................................... .32
1.6.2. Кодирование и декодирование сигналов в системах
опознавания ........................................................................................... 35
1.7. Общая характеристика систем пассивной локации ....................... 40
1.7.1. Назначение и типы систем пассивной локации ................................. 40
1.7.2. Принципы построения систем пассивной локации ........................... 40
1.8. Принципы построения систем радиолокационного распознавания 48
2. МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА ПРИМЕНЯЕМЫЕ В
СРЛ РТВ .................................................................................................. 53
2.1. Зона обнаружения СРЛ и ее характеристики ................................... 53
2.2. Способы обзора пространства используемые в СРЛ РТВ ............... 56
2.2.1. Сравнение способов обзора зоны обнаружения .............................. 58
2.3. Влияние способа обзора на дальность обнаружения РЛС ........... 59
2.4. Формирование зоны обнаружения в дальномерах и высотомерах 64
2.4.1. Требования к зоне обнаружения РЛК ................................................ 64
2.4.2. Формирование зоны обнаружения в дальномерах РЛК ................. 66
2.4.3. Обзор пространства и измерение координат в ПРВ ........................ 69
2.4.4. Способы обзора пространства и измерения координат в
трехкоординатных РЛС ....................................................................... 72
2.5. Формирование зоны обнаружения в РЛС метрового диапазона
волн .........................................................................................................80
2.5.1. Достоинства метрового диапазона волн при решении задач
радиолокационного обнаружения и измерения координат целей..80
2.5.2. Формирование зоны обнаружения в РЛС МДВ.............................. 83
3. ПЕРЕДАЮЩИЕ УСТРОЙСТВА РЛС РТВ .................................... 88
3.1. Назначение, основные характеристики и типы передающих
устройств РЛС РТВ .............................................................................. 88
3.2. Виды зондирующих сигналов и их параметры .............................. 94
3.2.1. Влияние структур и параметров зондирующих радиоимпульсов
на дальность обнаружения целей .................................................... 97
3.2.2. Влияние структур и параметров зондирующих радиоимпульсов
на точность измерения координат целей ........................................ 101
3.2.3. Влияние структур и параметров зондирующих радиоимпульсов
на разрешающую способность РЛС ................................................103
3.2.4. Влияние структур и параметров зондирующих радиоимпульсов
на защищенность РЛС от активных шумовых помех ................... 103
3.2.5. Влияние структур и параметров зондирующих радиоимпульсов
на защищенность от пассивных помех ............................................ 104
3.3. Импульсные модуляторы передающих устройств РЛС ............. 106
3.3.1. Назначение и состав импульсных модуляторов ..............................106
3.3.2. Структурные схемы основных типов модуляторных устройств
и их сравнительная характеристика .................................................108
3.4. Примеры технической реализации передающих устройств ......... 112
3.4.1. Передающее устройство РЛС 5Н84А ................................................112
3.4.2. Передающее устройство РЛС 55Ж6 ..................................................112
3.4.3. Передающее устройство РЛС 19Ж6 ..................................................114
4. ПРИЕМНЫЕ УСТРОЙСТВА РЛС РТВ ..........................................119
4.1. Назначение и структура тракта приема и выделения сигналов .... 119
4.2. Технические параметры приемных устройств и их влияние на
тактические характеристики РЛС ................................................... 123
4.3. Способы расширения динамического диапазона приемных
устройств .......................................................................................... 126
4.4. Приемные устройства широкополосных сигналов ....................... 133
4.4.1. Прием и обработка ЛЧМ сигналов ...................................................134
4.4.2. Прием и обработка ФКМ сигналов ................................................. 136
4.5. Принцип построения устройств накопления радиолокационных
сигналов ................................................................................................ 137
4.5.1. Назначение и классификация накопителей РЛ сигналов ............... 137
4.5.2. Когерентные накопители .................................................................... 139
4.5.3. Некогерентные накопители ................................................................ 142
4.5.4. Принципы построения рециркулятора ............................................. 143
4.5.5. Принципы построения цифровых устройств накопления
радиолокационных сигналов ............................................................146
– Конец работы –
Эта тема принадлежит разделу:
ПРИЕМНЫЕ УСТРОЙСТВА РЛС РТВ
Назначение и структура тракта приема и выделения сигналов Тракт приема и... Технические параметры приемных устройств и их... Принципы построения устройств накопления...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Сигналов
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.024 сек.
Новости и инфо для студентов