рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Вид работы: Лекции
- /
- Система « Человек – машина « [ «Человек–машина–среда»].
Реферат Курсовая Конспект
Система « Человек – машина « [ «Человек–машина–среда»].
Система « Человек – машина « [ «Человек–машина–среда»]. - Лекция, раздел Образование, В ТЗ содержаться в явной или не явной форме необходимые и достаточные данные для всех возможных решений Основной принцип; Человек (Человек– Оператор) Занимает Основное Место В Управлении Созданной Им...
Человек (человек– оператор) занимает основное место в управлении созданной им техникой. Технические средства помогают человеку усиливать его возможности с точки зрения физической силы, скорости действия Є производительности труда.
Ведущий принцип организации взаимодействия в системе « Человек–Машина « – ориентация на человека, как субъекта труда и творчества, с целью наиболее полного и рационального использования его интеллектуального и творческого потенциала. Т.О–М.– средство поддержания профессиональной деятельности человека: « Машина – для человека, а– не человек для машины !!! «.
N Научная и практическая задача организации систем «Человек–Машина–(Среда)» состоит в рациональном распределении и согласовании функций между Человеком и Машиной при сохранении ответственности за Человека !
Эту задачу решает Инженерная психология. При этом Человек–Оператор рассматривается в первую очередь не как звено системы, а именно как живого человека, обладающего такими свойствами, как:
восприятие;
внимание;
скорость реакции;
память, мышление, потребность в общении;
емкость и долговременность;
образность и гибкость оперативного мышления и т.д.
В инженерной психологии рассматривают:
сенсорный вход (органы чувств, или рецепторы человека) и моторный выход (двигательный или эффекторный аппарат человека) Человека–Оператора;
процессы переработки информации и задачи управления машинами (объектом);
нормальные и критические условия жизнедеятельности Человека–Оператора (физиологический или материальный).
é Человек Þ индуктивное мышление
Машина Þ дедуктивные действия û
По этим аспектам мы рассмотрим лишь некоторые рекомендации, которые могут оказаться полезными при конструировании пультов управления, приборных панелей, конструкторско–инженерных устройств и т.п.
При художественном конструировании применяются схемы взаимосвязей: простая: Человек–Объект


«Треугольник взаимосвязей»: Человек–Система управления–Объект (среда);

Ч–О: Оператор станка ЧПУ;
СУ: Блок ЭЧПУ;
О: Станок.
1 – получение Ч–О от СУ разнообразной выходной информации в виде сигналов от приборов (отсчётные, световые, звуковые).
2 – формирование человеком сигналов управления в виде действий по настройке, регулирования, управления станком.
3 – непосредственное воздействие объекта (среды) на Ч–О: расположение элементов блока управления должно соответствовать психофизиологическим возможностям.
4 – воздействие человека на объект (среду): работа со станком требует не только определённых знаний и навыков,но и «совместимости» параметров объекта с человеком (с учётом «помех»).
5 – воздействие СУ на объект (среду): система ЧПУ станка может иметь определённые геометрические размеры (что не всегда позволяет разместить её в станке).
6 – воздействие О(С) на СУ: СЧПУ должна нормально работать в условиях вибрации, загрязнённой атмосферы цеха, и других нежелательных воздействий.
Системный подход.
Чтобы упростить сложные процессы анализа работы Человека–Оператора в системах взаимосвязей применяют частотные модели поведения Человека–Оператора.
Чаще всего Человек–Оператор выступает в роли «машины» по приёму и выработке информации.

W – воздействие внешней среды.
Y = F (X, W).
Основные рецепторы (органы чувств):
Р 1 – зрение;
Р 2 – слух;
Р 3 – осязание;
Рпр. – (тактильные): обоняние,вкус,равновесие (вестибулярный аппарат).
Основные эффекторы (формируют сигналы управления):
Э 1 – пальцы рук (кисть) (точные, но менее сильные);
Э 2 – ноги (менее точные, но более сильные);
Эпр. – звуковые команды (речь), биоэлектрические потенциалы, параметры физиологической активности (t°, потоотделение, частота пульса и др.)
В соответствии с органами чувств на деятельность человека оказывают влияние (W):
освещённость и цвет среды;
шум, атмосферное давление;
характер поверхностей, с которой имеется контакт;
наличие запахов и токсичных веществ;
рабочая поза, t°C и влажность (термолабильность).
Для оптимизации связи Человека–Оператора с Оборудованием
необходимо знать:
какое количество информации Человек– Оператор может принять, передать или переработать в единицу времени: «Пропускная» способность и предельные скорости различных реакций;
какова точность восприятия и выдачи различных сигналов: время «задержки» (обработки) сигналов;
какова надёжность работы Человека–Оператора: способность противостоять W.
При этом вопросы необходимо решать путём «подгонки» параметров объекта конструирования под способности и возможности человека, а не наоборот.
Т.к. приём и переработка информации – процессы познавательные (ощущение – восприятие – представление ® мышление), которые сформировались в течение тысячелетий эволюции человека.
«Прибором» человека, с помощью которого он воспринимает или формирует сигналы, являются анализаторы: Рецептор + Нервные пути – центр в коре больших полушарий.
Рецепторный аппарат тесно связан с эффекторным (двигательным) аппаратом.
Если рассмотреть Схему прохождения сигнала по контуру управления: Человек–Оператор « Объект, можно выделить 9 характерных стадий (звеньев):
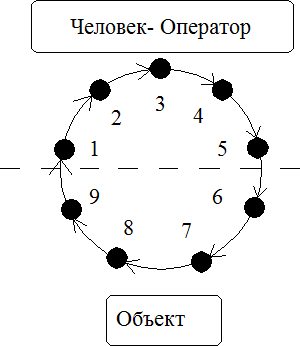
¬ восприятие показаний (сигналов);
Á преобразование показаний индикатора в форму удобную для сравнения с программой работы ®;
¯ принятие решения об изменении программы работы;
° воздействие на органы управления объектом;
± перемещение рабочих элементов регуляторов;
² реакция объекта на воздействие;
Ç работа объекта по новой программе;
´ отображение нового режима работы на индикаторах.
Основная характеристика этого процесса – скорость обращения сигнала по контуру управления, кроме того,– погрешностями и надёжностью звеньев; скоростью обработки информации в них.
Скорость обращения сигналов по контуру управления определяется временем полного цикла регулирования:
Т = Т0 + ТМ,
где Т0 – время задержки сигнала оператором (стадии 1...5); ТМ – время задержки сигнала объектом (стадии 6...9).
Всегда Т0 >> ТМ. Т0 – определяется следующими компонентами:
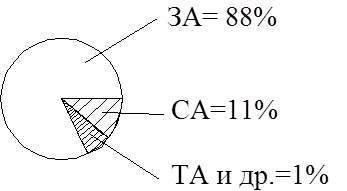
анализаторами и длительностью латентного периода (время от момента появления сигнала среднего уровня до ответа на него действием):
│ ?лп (за) = 0,15.... 0,22 с
│ ?лп (са) = 0,12.... 0,18 с
?лп (са) = 0,12.... 0,18 с
│ ?лп (та) = 0,09.... 0,22 с
│ ?лп (общ) =0,31....0,39 с
Кроме того, необходимо учесть количество индикаторов и органов управления.
А также темп работы оператора (бит с):
оптимально 0,5.....5 бит с (< 0,5 – «засыпает», > 5 – «перегружен»).
Таким образом скорость обработки сигнала оператором зависит от:
характера информации (знакомая 30...45 бс; незнакомая);
конструкции индикатора (шкала, светофор, звук);
характера считывания информации (команда, осведомление, ситуация);
различимость сигнала (сигнал должен превышать фон в 3....5 раз).
– Конец работы –
Эта тема принадлежит разделу:
В ТЗ содержаться в явной или не явной форме необходимые и достаточные данные для всех возможных решений Основной принцип;
Основы конструирования... Лекция Основы конструирования... Конструирование логический мыслительный процесс не исключающий однако элементов интуиции от абстрактно...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Система « Человек – машина « [ «Человек–машина–среда»].
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.015 сек.
Новости и инфо для студентов