Системы координат и параметры, определяющие положение ЛА в полете
Для определения положения ЛА в пространстве согласно ке полета ГОСТ 20058-80 применяются следующие правые прямоугольные системы координат.
1. Нормальная земная система координат  (рис. 4.2). Начало находится на поверхности земли: в определенной точке взлетно-посадочной полосы, в точке расположения ориентира, в центре наземной силы и т.д. Оси
(рис. 4.2). Начало находится на поверхности земли: в определенной точке взлетно-посадочной полосы, в точке расположения ориентира, в центре наземной силы и т.д. Оси  и
и  расположены в горизонтальной плоскости, а ось
расположены в горизонтальной плоскости, а ось  направлена вверх (вдоль местной вертикали). Ориентация осей
направлена вверх (вдоль местной вертикали). Ориентация осей  и
и  зависит от решаемой задачи и полагается неизменной (вращение Земли пренебрегается).
зависит от решаемой задачи и полагается неизменной (вращение Земли пренебрегается).
2. Нормальная система координат  (рис. 4.1). Начало находится в центре масс ЛА, оси
(рис. 4.1). Начало находится в центре масс ЛА, оси  и
и  расположены в горизонтальной плоскости, а ось
расположены в горизонтальной плоскости, а ось  направлена вверх. Оси нормальной и нормальной земной систем координат параллельны. Относительное положение этих систем координат определяется вектором
направлена вверх. Оси нормальной и нормальной земной систем координат параллельны. Относительное положение этих систем координат определяется вектором  между их началами.
между их началами.
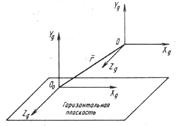
Рис. 4.1. Нормальная земная и нормальная системы координат
3. Связанная система координат  (рис. 4.2). Начало находится в центре масс ЛА. Ось
(рис. 4.2). Начало находится в центре масс ЛА. Ось  лежит в плоскости симметрии ЛА, направлена вдоль ЛА вперед и называется продольной осью. Ось
лежит в плоскости симметрии ЛА, направлена вдоль ЛА вперед и называется продольной осью. Ось  лежит в плоскости симметрии самолета, направлена вверх (при нормальном полете) и называется нормальной осью. Ось
лежит в плоскости симметрии самолета, направлена вверх (при нормальном полете) и называется нормальной осью. Ось  направлена вправо по ходу самолета и называется поперечной осью. Связанная система координат жестко фиксирована по отношению к самолету и её положение относительно нормальной системы определяет пространственное угловое положение самолета. Оно характеризуется эйлеровыми углами рыскания, тангажа и крена.
направлена вправо по ходу самолета и называется поперечной осью. Связанная система координат жестко фиксирована по отношению к самолету и её положение относительно нормальной системы определяет пространственное угловое положение самолета. Оно характеризуется эйлеровыми углами рыскания, тангажа и крена.

Рис. 4.2. Нормальная и связанная системы координат
Угол  , образуемый при повороте ЛА вокруг продольной оси
, образуемый при повороте ЛА вокруг продольной оси  относительно положения, при котором поперечная ось
относительно положения, при котором поперечная ось  горизонтальна, называется углом крена; угол
горизонтальна, называется углом крена; угол  , образуемый проекцией продольной оси на горизонтальную плоскость и заданным направлением
, образуемый проекцией продольной оси на горизонтальную плоскость и заданным направлением  называется углом рыскания; угол
называется углом рыскания; угол  , образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа. Связанная система координат используется при анализе углового движения самолета.
, образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа. Связанная система координат используется при анализе углового движения самолета.
4. Скоростная система координат  (рис. 4.3). Начало находится в центре масс ЛА. Ось
(рис. 4.3). Начало находится в центре масс ЛА. Ось  направлена вдоль вектора скорости ЛА относительно воздушной среды и называется скоростной осью. Ось
направлена вдоль вектора скорости ЛА относительно воздушной среды и называется скоростной осью. Ось  лежит в плоскости симметрии, направлена вверх (при нормальном полете) и называется осью подъемной силы. Ось
лежит в плоскости симметрии, направлена вверх (при нормальном полете) и называется осью подъемной силы. Ось  направлена вправо и называется боковой осью. Эта система используется для определения аэродинамических сил, действующих на самолет.
направлена вправо и называется боковой осью. Эта система используется для определения аэродинамических сил, действующих на самолет.
Рис. 4.3. Связанная и скоростная системы координат
Положение вектора воздушной скорости относительно связанной системы характеризуется углом атаки  , т.е. углом между проекцией указанного вектора на плоскость симметрии и продольной осью, и углом скольжения
, т.е. углом между проекцией указанного вектора на плоскость симметрии и продольной осью, и углом скольжения  между вектором воздушной скорости и плоскостью симметрии.
между вектором воздушной скорости и плоскостью симметрии.
5. Траекторная система координат  (рис. 4.4). Начало находится в центре масс ЛА. Ось
(рис. 4.4). Начало находится в центре масс ЛА. Ось  направлена вдоль вектора земной скорости ЛА
направлена вдоль вектора земной скорости ЛА  , где
, где  – вектор воздушной скорости,
– вектор воздушной скорости,  – вектор скорости ветра. Ось
– вектор скорости ветра. Ось  лежит в горизонтальной плоскости, ось
лежит в горизонтальной плоскости, ось  направлена вверх. По отношению к нормальной траекторная система координат повернута на углы
направлена вверх. По отношению к нормальной траекторная система координат повернута на углы  и
и  . Угол пути – это угол между осью
. Угол пути – это угол между осью  и вертикальной плоскостью, проходящей через ось
и вертикальной плоскостью, проходящей через ось  . Угол наклона траектории – это угол между осью
. Угол наклона траектории – это угол между осью  и горизонтальной плоскостью.
и горизонтальной плоскостью.

Рис. 4.4. Нормальная и траекторная системы координат
Поскольку движение ЛА непрерывно возмущается действующими на него силами и моментами, то для управления движением необходимо воздействовать на эти силы и моменты, изменяя их по требуемым законам. В качестве управляемых параметров выбирают угловые координаты и координаты центра масс, скорости, ускорения и т.д. Регулирующими факторами обычно являются углы отклонения руля высоты  , руля направления
, руля направления  , элеронов
, элеронов  , угол отклонения рукоятки управления двигателем
, угол отклонения рукоятки управления двигателем  и т.д.
и т.д.