рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Функциональная схема пилотажного комплекса ЛА
Реферат Курсовая Конспект
Функциональная схема пилотажного комплекса ЛА
Функциональная схема пилотажного комплекса ЛА - раздел Образование, Функциональная Схема Пилота...
Функциональная схема пилотажного комплекса ЛА.
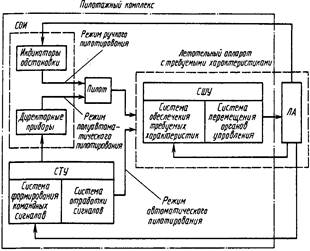
Пилотажный комплекс (ПК)—это комплекс оборудования, осуществляющий стабилизацию центра масс летательного аппарата на заданной опорной траектории и управление его поворотом вокруг центра масс с обеспечением требуемых пилотажных характеристик и безопасности полета при автоматическом, полуавтоматическом и ручном пилотировании.
В ПК входят три основных функциональных системы: система штурвального управления (СШУ), система траекторного управления (СТУ) и система отображения информации (СОИ).
Система штурвального управления (СШУ), состоящая из двух частей (системы перемещения органов управления и системы улучшения пилотажных характеристик), предназначена для обеспечения требуемых пилотажных характеристик (демпфирования, устойчивости и управляемости) и предотвращения возможности выхода самолета на опасные режимы при автоматическом, полуавтоматическом и ручном пилотировании. Аппаратурный состав и структура СШУ определяются аэродинамическими и геометрическими особенностями конкретного летательного аппарата. Система штурвального управления должна работать при каждом из трех возможных способов пилотирования. Она органически связана с самолетом. Если пилотажные характеристики самого самолета удовлетворяют требованиям, то необходимости в специальной подсистеме улучшения пилотажных характеристик не возникает. Но, с другой стороны, для самолетов, пилотирование которых невозможно без автоматических устройств, указанная подсистема должна быть спроектирована и установлена на самолете в первую очередь, чтобы обеспечить нормальные испытательные полеты.
Система траекторного управления состоит из двух частей (системы формирования командных сигналов и системы отработки сигналов рассогласования) и предназначена для стабилизации центра масс летательного аппарата на заданной траектории и управления поворотом летательного аппарата вокруг центра масс. Аппаратурный состав и структура СТУ определяются совокупностью пилотажных задач. К числу таких задач относятся управление высотой и скоростью полета, а также угловым положением самолета. Динамические контуры СШУ являются внутренними по отношению к динамическим контурам СТУ. К последним относятся контуры стабилизации углового положения самолета и контуры стабилизации центра масс самолета на заданной траектории.
В систему отображения информации включаются все средства индикации, устанавливаемые на рабочем месте летчика и обеспечивающие его информацией, необходимой для пилотирования самолета и выполнения полетного задания. Это — индикаторы пилотажной обстановки и директорные приборы.
Функциональная схема САУ СУ ЛА.

1 – объект управления, 2 – измерительные устройства, 3 – управляющая БЦВМ, 4 – исполнительные органы, 5 – органы управления режимами СУ
СУ ЛА – нужный комплекс устройств, нужных для получения силы тяги.
Удельные показатели СУ: удельная тяга, масса, расход топлива.
Режимы работы СУ зависят от многих параметров, для поддержания заданного режима тяги нужны САУ. Особенность системы управления СУ: она является автоматической.
Режимы полёта ЛА должны быть взаимосвязаны с САУ СУ для обеспечения надежности и безопасности полета.
Функциональная схема интегральной САУ ЛА и СУ.
Системы объединенного управления элементами силовой установки, режимами работы двигателя и режимами полета самолета, целью применения которых является наиболее эффективное выполнение задачи полета, называются интегральными. Интегральные системы управления обеспечивают одновременную оптимизацию режимов работы силовой установки и полета самолета в разнообразных условиях, в том числе и существенно отличающихся от стандартных.
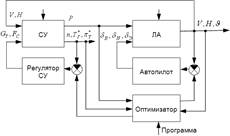
Из схемы видно, что параметры режима полета (высота и скорость полета, угловые координаты самолета) зависят от силы тяги силовой установки и от управляющих воздействий системы управления – автопилота. Сила тяги, в свою очередь, зависит от режимов полета летательного аппарата: скорости и высоты полета. Кроме того, сила тяги двигателя определяется положением регулирующих органов, задающих геометрические параметры элементов двигателя, расходом топлива в основную и форсажную камеры сгорания, определяемых работой регуляторов внутридвигательных параметров.
Контур интеграции «самолет–силовая установка» должен определять задающие воздействия на регуляторы двигателя и летательного аппарата. Основными задачами, выполняемыми контуром интеграции, являются задачи регулирования скорости полета на марше, в строю, при посадке; задачи оптимального управления, обеспечивающего  или
или  и др.
и др.
Классификация силовых установок летательных аппаратов.
Классификация СУ ЛА. Необходимый комплекс устройств, позволяющий получить силу тяги для ЛА. В него входят входное устройство, реактивный двигатель, выходное реактивное сопло и различные системы обслуживания СУ, системы смазки, системы охлаждения, системы управления. Тип СУ определяется типом двигателя.
Реактивный двигатель – тяга которого представляет собой силу реакции потоков продуктов сгорания топлива, получающих ускорение в самом двигателе и вытекающих из него в окружающую среду со скоростью большей v полета.
Реактивный двигатель (РД) несет запас окислителя и топлива, ВРД – использует кислород и ограничен по высоте. ПВРД – прямоточный воздушно реактивный двигатель.
Принципы работы ГТД.
ГТД имеет: 1- воздухозаборник (регулируемый)Классификация САУ силовых установок.
По назначению силовые установки делятся на основные и дополнительные.
Основные, используются при полете ЛА по маршруту
Дополнительные, бывают пусковые, стартовые и вспомогательные.
Пусковые используются при запуске, стартовые – при разгоне ЛА, вспомогательные – для получения электрической энергии на земле и при аварии основных СУ.
Уравнения движения ТРД.
, (5.2) где – момент инерции ротора турбокомпрессора; , – крутящие моменты,… После линеаризации нелинейного уравнения (5.2) путем разложения в степенной ряд относительно исходного установившегося…Матричная форма записи уравнений ГТД.
n0, T30, GTO, Fco-базовые значенияСвойства ТРД как объекта управления.
Расмотим ТРД неурегулированного параметром: (Tp+1)∆n=a1∆GT WnGt=∆n/∆GT=a1/Tp+1=1/T1p+p1 T1=T/a1Основные характеристики ГТД.
В отличие от поршневого двигателя, в ГТД процессы происходят в потоке движущегося газа. Сжатый атмосферный воздух из компрессора поступает в камеру сгорания, туда же… В качестве топлива могут использоваться любое горючее, которое можно диспергировать: бензин, керосин, дизельное…Особенности измерения температуры газа ГТД.
Величина неравномерности поля температур составляет 100…200 градусов. Неравномерность поля температур объясняется многими причинами: неравномерной… Отмечается также нерегулярность поля температур газа, т.е. в одной и той же… Таким образом, измерить истинную температуру газа в двигателе очень трудно и осуществить это можно лишь приближенно.…Основные принципы построения САУ температуры газа ГТД.
При выборе управляющих факторов необходимо учитывать, что САУ температурой газа работает одновременно с САУ частотой вращения. При выборе… Сильное влияние на температуру газа оказывает расход топлива в основной камере… Варианты включения регуляторов температуры газов в САУ ГТД:САУ компрессоров ГТД.
Компрессор газотурбинного двигателя
Законы управления ГТД на форсажных режимах.
Режим турбореактивного двигателя с форсажной камерой (ТРДФ) определяется тремя параметрами рабочего процесса. Это могут быть (или ), (или ), (или ).… Изменение режима работы форсажной камеры влияет на режим турбины, изменяя .… Регулирование форсированного режима по программе получило наибольшее распространение, так как при закритических…Основные принципы управления ГТД на режимах приемистости.
В зависимости от конструктивной схемы двигателя процессы приемистости и дросселирования происходят по-разному. На рис. 5.12 показан процесс разгона одновального ТРД без изменения… Видно, что до значения ограничение скорости на разгоне происходит из-за близости к границе газодинамической…Принципы построения и основные характеристики воздухозаборников.
Основные способы регулирования и структурные схемы САУ воздухозаборников
Рис.1 Программа управления входным устройством по степени сжатия компрессора … Система автоматического управления воздухозаборником по величине приведенной частоты вращения вала (АРВ-26А, АРВ-29Д,…Синтез структуры и параметров многосвязной САУ ГТД
Существуют различные методы проектирования многосвязных САУ (МСАУ): из условий полной или частичной автономности; по заданному распределению полюсов… Синтез МСАУ в общем виде можно решить в виде задачи приближения искомых… Структурная схема многосвязной системы автоматического управления представлена на рис. 5.15.Условия обеспечения автономности многомерной САУ ГТД
Очевидно, что автономность системы управления не может рассматриваться как самоцель. Развитие средств моделирования и цифровой техники делает также… Математически условие автономности формулируется следующим образом.…Классификация средств автоматизации ЛА
При рассмотрении задач, выполняемых системами автоматического управления, видно, что они должны состоять из ряда автоматических устройств. На пилотируемых ЛА к числу таких устройств относятся автоматы управления, автопилоты, автоматы тяги и командные системы управления.
Автоматы управления (демпферы крена, тангажа и рыскания, автоматы устойчивости) служат для улучшения динамических характеристик – управляемости и устойчивости ЛА. При применении автоматов управления ручное управление ЛА становится легким и точным.
Автоматические устройства, воздействующие на управляющие органы самолета (рули высоты и направления, элероны и т.д.) и обеспечивающие автоматическое пилотирование, называются автопилотами. Близкими по своим функциям являются автоматы тяги – автоматические устройства, служащие для управления скоростью полета.
Командные системы управления служат для обработки разнообразной пилотажно-навигационной информации, необходимой для управления на траектории полета, и выдачи её летчику в удобном для управления виде. При применении командных систем роль летчика сводится к отработке сформированных командных сигналов.
Совокупность указанных автоматических устройств образует САУ пилотируемых ЛА. Эта система может также включать ряд дополнительных устройств, обеспечивающих управление полетом в строю, управление аэроупругими колебаниями и др.
Основные принципы управления ЛА. Задачи управления
- ЛА с аэродинамическими органами управления - ЛА с газодинамическими органами управления - ЛА с комбинированным управленияЗадачи управления
Для управления ЛА нужно создать управляющие силы и моменты по 3-м взаимоперпендикулярным осям и менять их в соответствии с требованиями задачи… Формирование управленческих сил и моментов осуществляется с помощью САУ в… ЛА это еще и система твердых тел (например вертолет).Общий случай движения ЛА. Уравнения движения. Связь продольного и бокового движений
Дифференциальные уравнения движения ЛА в векторной форме имеют вид ; , (4.1)Системы координат и параметры, определяющие положение ЛА в полете
1. Нормальная земная система координат (рис. 4.2). Начало находится на поверхности земли: в определенной точке взлетно-посадочной полосы, в точке… 2. Нормальная система координат (рис. 4.1). Начало находится в центре масс ЛА,…Динамика продольного движения. Уравнения движения
Рис. 4.5. Продольное движение летательного аппарата Выберем систему координат с началом в центре масс ЛА, направив ось по касательной, а ось по нормали к траектории.…Часные случаи продольного движения
При полете с незначительным изменением высоты членами , , в уравнениях (4.9) можно пренебречь. При этом первые три уравнения системы (4.9) могут… ; ;Динамика бокового движения. Уравнения движения.
где – возмущающие моменты и сила, – коэффициент боковой силы. Для полного описания движения центра масс ЛА необходимо взять кинематическое…Частные случаи бокового движения. Передаточные функции.
2. Плоское движение со скольжением при неизменном угле крена. Полагая в уравнениях , получим (при выводе этих уравнений предположено, что угол атаки… ;. Отсюда находим выражения для передаточных функций, полагая :Характеристики возмущенной атмосферы.
Функциональная схема автопилота. Датчики, сервопривод, механизм согласования.
Автопилот является одним из важнейших элементов любой САУ. Автопилоты различаются структурными особенностями, законами управления, формой сигналов-носителей информации, числом каналов управления и др. Функциональная схема одного из каналов автопилота приведена на рис. Чувствительный элемент в сочетании с устройством для снятия сигналов образует датчик сигналов. Набор необходимых датчиков первичной информации диктуется конкретной структурой разрабатываемой САУ. Характеристиками датчиков являются передаточные функции и статические погрешности. Очевидно, что статические погрешности датчиков должны быть меньше требуемых точностей процессов управления.
Исполнительными устройствами систем управления, преобразующими командные сигналы в механические перемещения аэродинамических органов управления, являются приводы. В авиации применяют приводы гидравлического и электрического принципа действия. Привод, главной задачей которого является преобразование электрического командного сигнала в механическое перемещение, называют сервоприводом. Механизм согласования служит для автоматической подготовки автопилота к включению его силовой части. Механизм согласования представляет собой следящую систему, которая находится в замкнутом состоянии, когда автопилот не включен.
Законы управления автопилотов.
Требования к системам автоматического управления ЛА
Принцип действия каналов крена, тангажа и рыскания автопилота.
включающую контур управления угловой скоростью и контур управления углом тангажа. Передаточная функция ЛА взята в предположении постоянства скорости… Закон управления системы берем в виде, где – заданное значение угла тангажа, ,… Отсюда следует, что чем больше передаточное число , тем меньше статическая ошибка. Однако при значительном система…Системы управления угловой скоростью ЛА. Расчет передаточных чисел автопилота.
где и – соответственно собственная частота и коэффициент затухания ЛА. Для выбора передаточного числа заметим, что наилучшее качество процесса в… , , . Передаточная функция системы будет В пределе, при достаточно большой частоте , динамическими погрешностями можно…Схемы систем автоматизированного управления при посадке.
Посадочный маневр принято разделять на три фазы: – на первой фазе самолет выводится на осевую линию ВПП, производится выпуск… – вторая фаза посадки начинается с высоты ≈ 400 м с момента захвата глиссады. Здесь движение самолета происходит…Законы управления при заходе на посадку
Закон управления: . (13.11) Соответствующая структурная схема замкнутой системы управления представлена на рис. 13.3Автоматизация взлета самолета.
По требованиям ИКАО безопасная высота Hусл отсчитывается от уровня ВПП в точке отрыва и равна 10,7 м (35 футов). Взлет состоит из двух этапов: – разбега до скорости отрыва самолета от ВПП;Автоматическая бортовая система управления АБСУ-154. Назначение. Принцип работы. Основные характеристики.
Все функции АБСУ-154 выполняются тремя системами: – траекторного управления СТУ, которая формирует сигналы управления и… – автоматического управления САУ, которая обеспечивает необходимые характеристики устойчивости и управляемости, а…Основные принципы построения адаптивных автопилотов.
Общая схема: С целью адаптации основного контура системы к снешним условиям устр-ва адаптации меняет структуру или параметры…Цифровые системы управления полетом.
Первые цифровые бортовые системы управления полетом были применены в конце 70-х годов на самолетах B-757 и B-767, позднее в 80-х годах на самолетах… Комплекс стандартного цифрового пилотажно-навигационного оборудования (КС… Комплекс осуществляет автоматическое и полуавтоматическое самолетовождение по запрограммированным траекториям с…Интегрированное управление летательными аппаратами и их силовыми установками.
Задачи управления состоят в согласовании элементов СУ, улучшении приемистости двигателя, использовании поворота вектора тяги сопла для повышения… Для решения задач разработаны различные математические модели движения… Интеграция (согласование характеристик) СУ с двигателем и ЛА является одной из важнейших задач оптимального…– Конец работы –
Используемые теги: Функциональная, Схема, пилотажного, комплекса, ЛА0.081
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Функциональная схема пилотажного комплекса ЛА
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.185 сек.
Новости и инфо для студентов