Системы управления угловой скоростью ЛА. Расчет передаточных чисел автопилота.
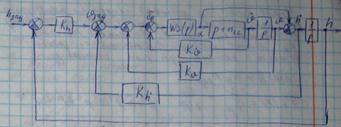
В системах автоматического управления полетом имеются контуры управления угловыми скоростями ЛА, служащие для формирования демпфирующих моментов и, следовательно, для улучшения качества переходного процесса. Для этих же целей применяются самостоятельные системы управления угловыми скоростями, получившие название демпферов. закон управления де
де  – передаточное число,
– передаточное число,  – заданная угловая скорость тангажа. Передаточная функция ЛА по угловой скорости
– заданная угловая скорость тангажа. Передаточная функция ЛА по угловой скорости
где  и
и  – соответственно собственная частота и коэффициент затухания ЛА.
– соответственно собственная частота и коэффициент затухания ЛА.
Для выбора передаточного числа  заметим, что наилучшее качество процесса в колебательном звене получается при
заметим, что наилучшее качество процесса в колебательном звене получается при  . Исключая из уравнений частоту
. Исключая из уравнений частоту  , получим выражение для
, получим выражение для  .
. параметры передаточной функции сервопривода определяются выражениями:
параметры передаточной функции сервопривода определяются выражениями:
 ,
,  ,
,  . Передаточная функция системы будет
. Передаточная функция системы будет  В пределе, при достаточно большой частоте
В пределе, при достаточно большой частоте  , динамическими погрешностями можно пренебречь и тогда поведение системы управления угловой скоростью крена будет описываться передаточной функцией типа инерционного звена, для которого увеличение передаточного числа
, динамическими погрешностями можно пренебречь и тогда поведение системы управления угловой скоростью крена будет описываться передаточной функцией типа инерционного звена, для которого увеличение передаточного числа  приводит к сокращению времени переходного процесса.
приводит к сокращению времени переходного процесса.
 48. Системы управления углом тангажа. Расчет передаточных чисел автопилота.
48. Системы управления углом тангажа. Расчет передаточных чисел автопилота.
Передаточная функция ЛА Закон управления системы берем в виде
Закон управления системы берем в виде  , где
, где  – заданное значение угла тангажа,
– заданное значение угла тангажа, ,–передаточные числа
,–передаточные числа где
где  ,
,  ,
,  ,
,  . Будем осуществлять выбор передаточных чисел
. Будем осуществлять выбор передаточных чисел  и
и  в два этапа. Сначала выберем значение
в два этапа. Сначала выберем значение  из условия заданного переходного процесса по угловой скорости тангажа во внутреннем контуре САУ. При коэффициенте затухания
из условия заданного переходного процесса по угловой скорости тангажа во внутреннем контуре САУ. При коэффициенте затухания  значение передаточного числа
значение передаточного числа  определяется выражением. Размерные передаточные числа:
определяется выражением. Размерные передаточные числа: ,
,  ,
,  . структура системы с изодромным автопилотом аналогична структуре системы с автопилотом, имеющим скоростную обратную связь, причем выполняются следующие соотношения между передаточными числами автопилотов:
. структура системы с изодромным автопилотом аналогична структуре системы с автопилотом, имеющим скоростную обратную связь, причем выполняются следующие соотношения между передаточными числами автопилотов:  ,
,  ,
,  .
.

51 САУ высотой полета.
Кунтуры угловой стабил. Лав продольной плоскости по углу тангажа. Анализ математической модели ЛА в продольной плоскости показывает что наиб.корректи.измненение высоты полета Н,достигается за счет измнения угла тангажа
Для стабилизации высоты полета дополноительно тангажа Дельта Vзадю должен зависеть от ошибки выдержания зад. Высоты. Дельта Vзад = -Кн(Н-Нз)
Соотв. Законов руля высоты.

Система статическая 
САУ высотой полета внешне по отклонении. К САУ угла движения.

Ошибка стабилизации дельта hнеравен Нулю.
По критерию гурвица.
 Сау высотой полета.
Сау высотой полета.
Изменение скорости существенно влияет на процесс стабилизации важнейших парамертов полет:угла тангажа, высоты, устойчивости ск-ть полета ЛА в горизон. Полете определяется из следующего уравнения.
M*dV/Dt=P *cosАЛьфа-Х
M –масса самолета.
Альфа – угол атаки.
Х- сила лобового сопротивления
Р- сила тяги.
P=P(V), X=X(V)
M*dV/dt=P(v)cosАЛьфа-X(V)
При установившемся режиме когда V=const, dV/dt=0
ЛА на определенных режимах полета может быть неустойчивым объектом.
Управлять скоростью полета можно 2-мя путями 1) непосредственное воздействие на ягу двигатетлей. 2) косвенным путем воздействуя на руль высота, тем самым вызывая изменение угла тангажа, а следовательно лобовое споротивления, что приводит к изменения скорости.
53 Полуавтоматические (директорные) системы управления обеспечивают сбор и анализ информации о положении ВС в пространстве, поступающей от навигационного оборудования, и выдают пилоту команду на управление им. Управление ВС при помощи таких пилотажно-навигационных систем называется полуавтоматическим, так как в этом случае автоматизированы лишь сбор и обработка информации о состоянии ВС, а управление им сохраняется ручным.
Полуавтоматические системы управления применяются в тех случаях, когда участие человека обеспечивает большую безопасность полета, чем это может обеспечить автоматическая система в настоящее время. Важнейшее значение имеет эргономическая совместимость системы управления и оператора.
степень участия человека-оператора в управлении устанавливается путем сопоставления преимуществ и недостатков «человека» и «машины». Деятельность человека многофункциональна. Он способен наблюдать за различными по физической природе сигналами, фильтровать, сглаживать их, осуществлять селекцию и распознавание образов при минимуме информации, импровизировать свою деятельность, т.е. достигать одних и тех же целей различными способами. Человек способен принимать решения при маловероятных, критических ситуациях в силу своей творческой способности, хорошо развитой логики, способности к адаптации, высокой избирательности. Он может выполнять точные координированные движения. Однако человеку – высокоорганизованному живому существу, присущи элементы страха, неуверенности, скуки, раздражительности, утомления и т.п. Он плохо работает в режиме «ожидания», не приспособлен к монотонной работе («засыпает»), слаб физически. Пропускная способность его довольно низка, вычислительные операции проводит медленно и неточно, долго воспроизводит в памяти полученную ранее информацию.
54. Международная организация гражданской авиации (ИКАО) определила пять основных эксплуатационных категорий или посадочных минимумов, характеризуемых высотой принятия решения и дальностью видимости на ВПП, по которым осуществляется заход на посадку и посадка. Под высотой принятия решения понимается высота, на которой должен быть начат маневр ухода самолета на второй круг, если до этой высоты не был установлен надежный контакт с наземными ориентирами по курсу посадки, позволяющий выполнить безопасную посадку самолета. По требованиям, предъявляемым к режимам посадки, вероятность неудовлетворительного захода на посадку, вызывающая летное происшествие, должна быть не более 10-7.
К основным эксплуатационным категориям относятся:
– I категория (посадочный минимум I категории), предусматривающая выполнение захода на посадку до высоты принятия решения 60 м при дальности видимости на ВПП не менее 800 м (60×800 м);
– II категория, предполагающая выполнение захода на посадку до высоты принятия решения 30 м при дальности видимости на ВПП не менее 400 м (30×400 м);
– IIIA категория, предполагающая заход на посадку, посадку и руление по ВПП при дальности видимости на ВПП не менее 200 м (0×200 м);
– IIIB категория, предполагающая заход на посадку, посадку, руление по ВПП и рулежным дорожкам при видимости на ВПП не менее 50 м (0×50 м);
– IIIC категория, предполагающая заход на посадку, посадку, руление по ВПП и рулежным дорожкам без возможности использования внешних ориентиров (0×0 м);
Таким образом, в системах посадки I и II категорий осуществляется лишь автоматический заход на посадку, а третья фаза посадки (выравнивание и приземление) осуществляется пилотом вручную. В системах III категории должен быть инструментальный контроль и автоматическое управление вплоть до приземления.
55перед заходом на посаду ЛА совершает предпосадочный маневр «коробочка» который образуется 4-мя разворотами,
Глиссада задается в пространствес помощью маяков.
На борту Ла ист-ся 2 радиоволны: глиссадный радиоприемник ГРП и курсовой КРП. Для автоматизации управлнеие ЛА при посадке необходимо выходные сигналы курсового и глиссадного приемников представляют собой сигналы пост.тока подавать после усиления в соотв канале автопилота
Er – отклонение Ла по глиссаде, Ул- по курсу.Если сигнал курсового приемника подать в автопилот, то Ла будет совершать разворот по направлению к центральной линии Ввп, скорость которого будет пропорциональна величине этого сигнала. Если сигнал глиссадного радиоприемника падать в продольный канал ЛА, то Ла будет совершать движение по направлению к глиссаде со скоросью тангажа пропорциональному сигналу приемника 
КУ- корр.устройство.ПСВК- приемник системы ведущих кабелей
В состав наземного радиооборудования системы посадки входят: курсовой радиомаяк (КРМ), глиссадный радиомаяк (ГРМ), маркерные радиомаяки (МРМ), аппаратура автоматического контроля и дистанционного управления, вспомогательная контрольно-измерительная и сервисная аппаратура.
Курсовой радиомаякпредназначен для выдачи информации (сигналов) о положении самолета относительно вертикальной плоскости, проходящей через ось ВПП. Антенная система радиомаяка располагается строго на оси ВПП на расстоянии 600—1000 м от порога ВПП, противоположного направлению захода на посадку. КРМ работает на одной из 20 фиксированных частот в диапазоне 108,1 —111,9 МГц. Излучение горизонтально поляризованное.
Глиссадный радиомаяк предназначен для выдачи информации о положении самолета относительно заданной линии снижения в вертикальной плоскости. Антенная система ГРМ располагается таким образом, чтобы продольная линия прямолинейного участка глиссады проходила над порогом ВПП на высоте 15 м. Этим определяется продольное удаление от порога ВПП антенной системы ГРМ. Для стандартного угла наклона глиссады 2,7° и для местности без уклонов это расстояние составляет 250 м. Боковое смещение ГРМ от оси ВПП лимитируется требованиями безопасного пролета над препятствиями и составляет, как правило, 180 м.
Дальность действия ГРМ не менее 18 км.
Маркерные радиомаяки предназначены для выдачи информации о расстоянии самолета от порога ВПП в фиксированных точках вдоль оси ВПП. В гражданской авиации СССР МРМ располагаются, как правило, на расстоянии 1050 м (ближний) и 4000 м (дальний) от порога ВПП.