Таблиця 3
Значення ККД для механізму крана
| Тип механізму | Номінальний ККД ηн при опорах | |
| Механізм піднімання: | Кочення | Гойдання |
| із циліндричними колесами | 0,8 – 0,85 | 0,7 – 0,8 |
| із черв’ячною передачею | 0,65 – 0,7 | 0,65 – 0,7 |
| Механізм пересування: | ||
| із циліндричними колесами | 0,8 – 0,9 | 0,75 – 0,85 |
| із черв’ячною передачею | 0,65 – 0,75 | 0,65 – 0,75 |
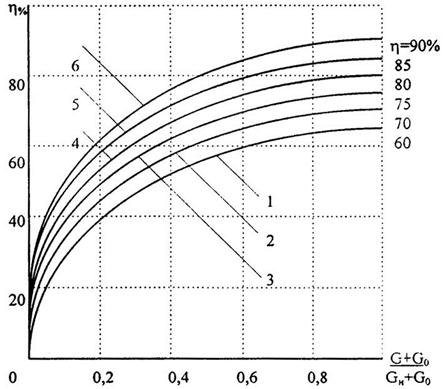
Рис.1. Залежності  при
при 
Статичний момент при підйомі порожнього вантажозахватного пристрою розраховують за формулою
 (15)
(15)
де  – ККД холостого ходу (G = 0), який визначається за кривою, згідно з номінальним ККД (див. рис. 1).
– ККД холостого ходу (G = 0), який визначається за кривою, згідно з номінальним ККД (див. рис. 1).
У режимах спуску розрізняють силовий спуск і спуск гальмуванням вантажів.
Силовий спуск застосовують для легких вантажів, сила важкості яких не спроможна подолати сили тертя в механізмі. У цьому випадку статичний момент Мс зумовлений дією сили важкості вантажу, що спускається, меншої від моменту тертя в крановому механізмі Мз, і спуск вантажу виконується електродвигуном, увімкненим на спуск (III квадрант).
Спуск гальмуванням використовують при спусканні важких вантажів (Мс > Мтр,); при цьому для запобігання вільному падінню вантажу електродвигун створює гальмівний момент (спуск або в режимі рекуперації, або в режимі _в._анням_ватну_ – IV квадрант), переходячи в генераторний режим і обмежуючи швидкість спуску.
При спуску гальмуванням номінального вантажу 
 (16)
(16)
а момент, що розвивається електродвигуном при силовому спуску вантажу, визначається співвідношенням
 (17)
(17)
де
 . (18)
. (18)
При силовому спуску порожнього вантажозахватного пристрою момент, що розвивається електродвигуном, з урахуванням співвідношень (17) і (18) розраховується за формулою
 (19)
(19)
Попередній вибір потужності двигуна механізму піднімання здійснюється методом середньоквадратичного моменту
 (20)
(20)
де  – тривалість роботи механізму в режимах піднімання і спускання при відповідних статичних моментах.
– тривалість роботи механізму в режимах піднімання і спускання при відповідних статичних моментах.
При відсутності точних даних стосовно часу перехідних процесів приймають
 .
.
Тоді вираз (20) матиме вигляд
 (21)
(21)
Для обліку перехідних процесів в електроприводі при пуску і гальмуванні попередній розрахунок потужності двигуна, кВт, здійснюється з деяким запасом
 (22)
(22)
де  – коефіцієнт запасу, який враховує вплив динамічних навантажень;
– коефіцієнт запасу, який враховує вплив динамічних навантажень;
 – задана синхронна швидкість двигуна, рад/с;
– задана синхронна швидкість двигуна, рад/с;
Мср – середньоквадратичний момент, Н·м.
Перерахунок потужності двигуна, кВт, на стандартну тривалість (ПВ) у відсотках проводиться за спрощеною формулою
 , (23)
, (23)
де  – розрахункова потужність двигуна, відповідна стандартній тривалості ввімкнення ТВк, %;
– розрахункова потужність двигуна, відповідна стандартній тривалості ввімкнення ТВк, %;
Р – потужність двигуна при розрахунковій (заданій) тривалості ввімкнення ТВ, %.
За розрахунковим значенням потужності Рк і відповідною їй стандартною тривалістю включення ТВк, а також за заданою синхронною швидкістю проводять попередній вибір двигуна за каталогом, при цьому необхідно дотримуватись умови
 (24)
(24)
де  – номінальна потужність вибраного за каталогом [5] двигуна, або із [1, дод. 14, 16 с. 17 – 21].
– номінальна потужність вибраного за каталогом [5] двигуна, або із [1, дод. 14, 16 с. 17 – 21].
Після вибору двигуна слід уточнити передавальне число редуктора і визначити фактичну швидкість підйому вантажу υпф:
 (25)
(25)
де  – передаточне число редуктора, розраховане за формулою (7);
– передаточне число редуктора, розраховане за формулою (7);
 – номінальна кутова швидкість двигуна, рад/с;
– номінальна кутова швидкість двигуна, рад/с;
– номінальна швидкість обертання вала двигуна, об/_в..
За потужністю рн, уточнюваним передавальним числом  і заданим режимом роботи необхідно вибрати редуктор, користуючись працею [1, дод. 13, с. 15 – 17].
і заданим режимом роботи необхідно вибрати редуктор, користуючись працею [1, дод. 13, с. 15 – 17].
Фактична швидкість підйому вантажу
 (26)
(26)
де  – стандартне передавальне число вибраного редуктора.
– стандартне передавальне число вибраного редуктора.
Отримане значення хп.ф. повинно мало відрізнятися від величини заданої швидкості підйому хп (не більше ніж на 15%).