Ю.Б.Гиппенрейтер
ФИЗИОЛОГИЯ ДВИЖЕНИЙ И ФИЗИОЛОГИЯ АКТИВНОСТИ1
Залог успеха работ Бернштейна состоял в том, что он отказался от традиционных методов исследования движений. До него движения, как правило, загонялись в прокрустово ложе лабораторных процедур и установок; при их исследовании часто производилась перерезка нервов, разрушение центров, внешнее обездвижение животного (за исключением той части тела, которая интересовала экспериментатора), лягушек обезглавливали, собак привязывали к станку и т.п.
Объектом изучения Н.А.Бернштейн сделал естественные движения нормального, неповрежденного организма, и, в основном, движения человека. Таким образом, сразу определился контингент движений, которыми он занимался; это были движения трудовые, спортивные, бытовые л др. Конечно, потребовалась разработка специальных методов регистрации движений, что с успехом осуществил Бернштейн.
До работ Н.А.Бернштейна в физиологии бытовало мнение (которое излагалось и в учебниках), что двигательный акт организуется следующим образом: на этапе обучения движению в двигательных центрах формируется и фиксируется его программа; затем в результате действия какого-то стимула она возбуждается, в мышцы идут моторные командные импульсы, и движение реализуется. Таким образом, в самом общем виде механизм движения описывался схемой рефлекторной дуги: стимул — процесс его центральной переработки (возбуждение программ) — двигательная реакция.
Первый вывод, к которому пришел Н.А.Бернштейн, состоял в том, что так не может осуществляться сколько-нибудь сложное движение. Вообще говоря, очень простое движение, например, коленный рефлекс или от-
 1 Гиппенрейтер Ю.Б. Введение в общую психологию: Курс лекций. М.: ЧеРо, 1998. С. 138—151.
1 Гиппенрейтер Ю.Б. Введение в общую психологию: Курс лекций. М.: ЧеРо, 1998. С. 138—151.
518 Тема 6. Строение индивидуальной деятельности человека
 дергивание руки от огня, может произойти в результате прямого проведения моторных команд от центра к периферии. Но сложные двигательные акты, которые призваны решить какую-то задачу, достичь какого-то результата, так строиться не могут. Главная причина состоит в том, что результат любого сложного движения зависит не только от собственно управляющих сигналов, но и от целого ряда дополнительных факторов. Какие это факторы, я скажу несколько позже, а сейчас отмечу только их общее свойство: все они вносят отклонения в запланированный ход движения, сами же не поддаются предварительному учету. В результате окончательная цель движения может быть достигнута, только если в него будут постоянно вноситься поправки, или коррекции. А для этого ЦНС должна знать, какова реальная судьба текущего движения. Иными словами, в ЦНС должны непрерывно поступать афферентные сигналы, содержащие информацию о реальном ходе движения, а затем перерабатываться в сигналы коррекции.
дергивание руки от огня, может произойти в результате прямого проведения моторных команд от центра к периферии. Но сложные двигательные акты, которые призваны решить какую-то задачу, достичь какого-то результата, так строиться не могут. Главная причина состоит в том, что результат любого сложного движения зависит не только от собственно управляющих сигналов, но и от целого ряда дополнительных факторов. Какие это факторы, я скажу несколько позже, а сейчас отмечу только их общее свойство: все они вносят отклонения в запланированный ход движения, сами же не поддаются предварительному учету. В результате окончательная цель движения может быть достигнута, только если в него будут постоянно вноситься поправки, или коррекции. А для этого ЦНС должна знать, какова реальная судьба текущего движения. Иными словами, в ЦНС должны непрерывно поступать афферентные сигналы, содержащие информацию о реальном ходе движения, а затем перерабатываться в сигналы коррекции.
Таким образом, Н.А.Бернштейном был предложен совершенно новый принцип управления движениями; он назвал его принципом сенсорных коррекций,имея в виду коррекции, вносимые в моторные импульсы на основе сенсорной информации о ходе движения.
А теперь познакомимся с дополнительными факторами, которые, помимо моторных команд, влияют на ход движения.
Во-первых, это реактивные силы. Если вы сильно взмахнете рукой, то в других частях тела разовьются реактивные силы, которые изменят их положение и тонус.
Это хорошо видно в тех случаях, когда у вас под ногами нетвердая опора. Неопытный человек, стоя на льду, рискует упасть, если слишком сильно ударит клюшкой по шайбе, хотя, конечно, это падение никак не запланировано в его моторных центрах. Если ребенок залезает на диван и начинает с него бросать мяч, то мать тут же спускает его вниз; она знает, что бросив мяч, он может сам полететь с дивана; виной опять будут реактивные силы.
Во-вторых, это инерционные силы. Если вы резко поднимете руку, то она взлетает не только за счет тех моторных импульсов, которые посланы в мышцы, но с какого-то момента движется по инерции. Влияние инерционных сил особенно велико в тех случаях, когда человек работает тяжелым орудием — топором, молотом и т.п. Но они имеют место и в любом другом движении. Например, при беге значительная часть движения выносимой вперед ноги происходит за счет этих сил.
В-третьих, это внешние силы. Если движение направлено на объект, то оно обязательно встречается с его сопротивлением, причем это сопротивление далеко не всегда предсказуемо. Представьте себе, что вы натираете пол, производя скользящие движения ногой. Сопротивление пола в каждый момент может отличаться от предыдущего, и заранее знать его вы
Гиппенрейтер Ю.Б. Физиология движений и физиология активности 519
 никак не можете. То же самое при работе резцом, рубанком, отверткой. Во всех этих и многих других случаях нельзя заложить в моторные программы учет меняющихся внешних сил.
никак не можете. То же самое при работе резцом, рубанком, отверткой. Во всех этих и многих других случаях нельзя заложить в моторные программы учет меняющихся внешних сил.
Наконец, последний непланируемый фактор — исходное состояние мышцы.
Состояние мышцы меняется по ходу движения вместе с изменением ее длины, а также в результате утомлений и т.п. Поэтому один и тот же управляющий импульс, придя к мышце, может дать совершенно разный моторный эффект.
Итак, действие всех перечисленных факторов обусловливает необходимость непрерывного учета информации о состоянии двигательного аппарата и о непосредственном ходе движения. Эта информация получила название «сигналов обратной связи». Кстати, роль сигналов обратной связи в управлении движениями, как и и задачах управления вообще, А.Н.Бернштейн описал задолго до появления аналогичных идей в кибернетике1. Тезис о том, что без учета информации о движении последнее не может осуществляться, имеет веские фактические подтверждения. Рассмотрим два примера. Первый я беру из монографии Н.А.Бернш-тейна2.
Есть такое заболевание — сухотка спинного мозга, при котором поражаются проводящие пути проприоцептивной, т.е. мышечной и суставной, а также кожной чувствительности. При этом больной имеет совершенно сохранную моторную систему: моторные центры целы, моторные проводящие пути в спинном мозге сохранны, его мышцы находятся в нормальном состоянии. Нет только афферентных сигналов от опорно-двигательного аппарата. И в результате движения оказываются полностью расстроены. Так, если больной закрывает глаза, то он не может ходить; также с закрытыми глазами он не может удержать стакан — тот у него выскальзывает из рук. Все это происходит потому, что субъект не знает, в каком положении находятся, например, его ноги, руки или другие части тела, движутся они или нет, каков тонус и состояние мышц и т.п. Но если такой пациент открывает глаза и если ему еще на полу чертят полоски, по которым он должен пройти (т.е. организуют зрительную информацию о его собственных движениях), то он идет более или менее успешно. То же происходит с различными ручными движениями.
Другой пример я беру из относительно новых экспериментальных исследований организации речевых движений.
 1 Примерно в то же время, т.е. в середине 30-х годо». наличие сигналов обратной связи
1 Примерно в то же время, т.е. в середине 30-х годо». наличие сигналов обратной связи
в контуре управления физиологическими актами было описано другим советским физио
логом, П.К.Анохиным, под названием «санкционирующая афферентация» (см. Анохин П.К.
Избранные труды. Философские аспекты теории функциональной системы. М., 1978).
2 См. Бернштейн НА. О построении движений. М., 1947.
520 Тема 6. Строение индивидуальной деятельности человека
 Когда человек говорит, то он получает сигналы обратной связи о работе своего артикуляционного аппарата в двух формах: в форме тех же про-приоцептивных сигналов (мы имеем чувствительные «датчики» в мышцах гортани языка, всей ротовой полости) и в форме слуховых сигналов.
Когда человек говорит, то он получает сигналы обратной связи о работе своего артикуляционного аппарата в двух формах: в форме тех же про-приоцептивных сигналов (мы имеем чувствительные «датчики» в мышцах гортани языка, всей ротовой полости) и в форме слуховых сигналов.
Вообще сигналы обратной связи от движений часто залараллелены, т.е. они поступают одновременно по нескольким каналам. Например, когда человек идет, то ощущает свои шаги с помощью мышечного чувства и одновременно может их видеть и слышать. Так же и в обсуждаемом случае: воспринимая проприоцептивные сигналы от своих речевых движений, человек одновременно отчетливо слышит звуки своей речи. Я сейчас докажу, что и те и другие сигналы используются для организации речевых движений.
Современная лабораторная техника позволяет поставить человека в совершенно необычные условия. Испытуемому предлагают произносить какой-нибудь текст, например, знакомое стихотворение. Этот текст через микрофон подают ему в наушники, но с некоторым запаздыванием; таким образом, испытуемый слышит то, что он говорил несколько секунд назад, а то, что говорит в данный момент, он не слышит. Оказывается, что в этих условиях речь субъекта полностью расстраивается; он оказывается неспособным вообще что-либо говорить!
В чем здесь дело? Нельзя сказать, что в описанных опытах испытуемый лишен сигналов обратной связи: оба чувствительных канала — мышечный и слуховой — функционируют. Дело все в том, что по ним поступает несогласованная, противоречивая информация. Так что на основании одной информации следовало бы производить одно речевое движение, а на основании другой — другое движение. В результате испытуемый не может произвести никакого движения.
Замечу, что описанный прием «сшибки» сигналов обратной связи используют для выявления лиц, симулирующих глухоту: если человек действительно не слышит, то задержка сигналов обратной связи по слуховому каналу не вызывает у него никакого расстройства речи; если же он только притворяется неслышащим, то этот прием действует безотказно.
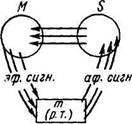
Перейдем к следующему важному пункту теории Н.А.Бернштейна — к схеме рефлекторного кольца.Эта схема непосредственно вытекает из принципа сенсорных коррекций и служит его дальнейшим развитием. Рассмотрим сначала упрощенный вариант этой схемы (см. рис. 1, А).
Имеется моторный центр (М), из которого поступают эффекторные команды в мышцу. Изобразим ее блоком внизу, имея в виду также рабочую точку движущегося органа (т). От рабочей точки идут сигналы обратной связи в сенсорный центр (S); это чувствительные, или афферентные, сигналы. В ЦНС происходит переработка поступившей информации, т.е. перешифровка ее на моторные сигналы коррекции. Эти сигналы снова поступают в мышцу. Получается кольцевой процесс управления.
Гиппенрейтер Ю.Б. Физиология движений и физиология активности


|
|

|

|

|