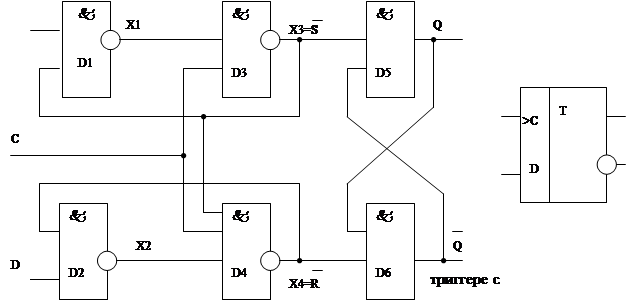
Динамический D – триггер (синхронный).
В

динамическим управлением информация записывается только в момент перепада напряжения на входе синхронизации.
 |  |  |  | ||||||
 |
X1 = X3 . X2; Х2 = Х4 . D; Х3 = S = X1 . C; Х4 = Х2 . Х3 . С
 |  |
Пока сигнал С = 0 Х3 = Х4 = 1 (S = R = 1), поэтому согласно таблице истинности это соответствует режиму хранения триггером информации, а сигналы на выходах D1 и D2 соответствуют входному информационному сигналу.
 | |||||||
 |  |  |
Х2 = D . 1 = D и X1 = D . 1 = D
Так как сигналы Х2 и Х1 инверсны по отношению друг к другу, то при С = 1 только один из них разрешает прохождение синхроимпульса через D3 или D4.
 | |||||
 |  | ||||

 С = 1 D = 1: S = X3 = C . X1 = C . D = 1 . 1 = 0
С = 1 D = 1: S = X3 = C . X1 = C . D = 1 . 1 = 0
|



 R = X4 = X2 . C . X3 = D . C . S = 0 . 1 . 0 = 1
R = X4 = X2 . C . X3 = D . C . S = 0 . 1 . 0 = 1

|


 C = 1 D = 0 : S = X3 = C . X1 = C . D = 1 . 0 = 1
C = 1 D = 0 : S = X3 = C . X1 = C . D = 1 . 0 = 1
 |  |

 R = X4 = X2 . C . X3 = D . C . S = 0 . 1 . 1 = 0
R = X4 = X2 . C . X3 = D . C . S = 0 . 1 . 1 = 0

|
|
 |
Динамический D-триггер состоит из трёх статических RS-триггеров. D1, D3 и D2, D4 производят подготовку информации. D5, D6 – записывают предварительно логически обработанную первыми двумя триггерами информацию.