Момент силы и момент импульса относительно неподвижного центра и неподвижной оси
Рассмотрим движение материальной точки m под действием силы  . Положение этой частицы будем задавать относительно начала неподвижной системы координат радиус-вектором
. Положение этой частицы будем задавать относительно начала неподвижной системы координат радиус-вектором  (рис. 8.1).
(рис. 8.1).
Рис. 8.1
По определению, моментом силы относительно неподвижного центра 0  называется следующее векторное произведение:
называется следующее векторное произведение:
 . (8.1)
. (8.1)
Вектор момента силы перпендикулярен плоскости, образованной векторами и . Направление этого вектора связано с направлениями перемножаемых векторов «правилом правого винта».
Проекция вектора момента силы на какую-либо ось называется моментом силы относительно этой оси. Рассмотрим, например, момент силы относительно оси z (рис. 8.2). Разложим силу на три составляющие:
здесь:  — составляющая, параллельная оси z;
— составляющая, параллельная оси z;
 — составляющая, перпендикулярная оси z и действующая вдоль прямой, проходящей через z;
— составляющая, перпендикулярная оси z и действующая вдоль прямой, проходящей через z;
 — составляющая, перпендикулярная плоскости, проходящей через ось и точку приложения силы.
— составляющая, перпендикулярная плоскости, проходящей через ось и точку приложения силы.
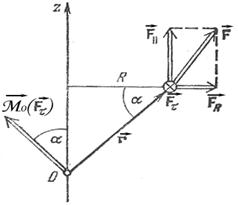
Рис. 8.2
Момент силы относительно центра 0 можно представить теперь суммой моментов её составляющих относительного того же центра. Действительно, умножим векторно предыдущее разложение на радиус-вектор :
 .
.
В этом равенстве все слагаемые — моменты соответствующих сил:
 .
.
Спроецируем это уравнение на ось Z
 .
.
Первые слагаемые равны нулю, так как векторы  и
и  перпендикулярны оси Z, поэтому их проекции на Z равны нулю.
перпендикулярны оси Z, поэтому их проекции на Z равны нулю.
Таким образом, момент силы относительно оси Z равен проекции на эту ось момента силы  относительно центра 0.
относительно центра 0.

Момент силы относительно неподвижного центра 0:

образует с осью Z угол a (см. рис. 8.2), поэтому его проекцию на эту ось следует записать так:
 .
.
Здесь  , поэтому
, поэтому
 . (8.2)
. (8.2)
Здесь R=r Сosa–кратчайшее расстояние от оси вращения до точки приложения силы называется плечом силы.
Как и следовало ожидать, момент силы относительно оси Z зависит от величины её составляющей Ft. Две другие составляющие — и — вообще не создают момента относительно оси Z.
Другой важной характеристикой вращательного движения частицы является момент импульса относительно неподвижного центра «0». Это тоже векторная величина. Она равна векторному произведению радиус-вектора частицы на её импульс  =
=  (рис. 8.3).
(рис. 8.3).
 . (8.3)
. (8.3)
Модуль момента импульса равен:
L = r × mV × Sina = r × p × Sina,
где a — угол между векторами  и .
и .
Рис. 8.3
Моментом импульса системы материальных точек называется векторная сумма их моментов импульса:
 .
.
Проекция вектора момента импульса на некоторую ось OZ называется моментом импульса частицы (или системы) относительно этой оси:
 .
.
Введение понятий «момент силы» и «момент импульса» обусловлено тем, что эти величины связаны друг с другом. В механике эта связь устанавливается «уравнением моментов».