ТЕОРЕТИЧЕСКАЯ МЕХАНИКА

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ТЕХНОЛОГИЙ И УПРАВЛЕНИЯ
Имени К.Г.Разумовского
Кафедра теоретической механики и инженерной графики
Буторин Л.В.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Рабочая программа, контрольные задания и методические рекомендации для студентов специальностей 260601, 260602, 220301 всех форм обучения
Москва 2011
УДК 621.81
Буторин Л.В. Теоретическая механика. Программа, контрольные задания и методические рекомендации для студентов специальностей 260601, 260602, 220301 всех форм обучения. – М.: МГУТУ, 2011.
Пособие содержит рабочую программу, включающую тематический план дисциплины и организационно-методические материалы, задания на контрольные работы, методические рекомендации по выполнению работ, вопросы для подготовки к экзамену.
Автор Буторин Л.В.
Рецензент доцент, к.т.н. Бусыгина Е.Б.
Редактор Свешникова Н.И.
Московский государственный университет технологий и управления, 2011 109004, Москва, Земляной вал,73.
Содержание
Введение……………………………………………………………………….4
1. Рабочая учебная программа………………………………………………….5
1.1. Цели и задачи дисциплины.................................................................5
1.2. Тематическое содержание дисциплины ...........................................5
1.3. Организационно-методические данные……………………………6
1.4. Тематический план лекций……………………….............................6
1.5. Тематический план практических занятий…………………………7
2. Рекомендации по выполнению контрольных работ.. ……………………...7
2.1. Правило выбора задания…………………………………………….7
2.2. Методические рекомендации к решению задачи «С»…………….8
2.3. Методические рекомендации к решению задачи «К1»………… 11
2.4. Методические рекомендации к решению задачи «К2»………… 13
2.5. Методические рекомендации к решению задачи «Д1» ………… 18
2.6. Методические рекомендации к решению задачи «Д2»………… 22.
2.2. Методические рекомендации к решению задачи «Д3»………… 27
3. Контрольные задания……..……………….……….………………………..30
4. Контрольные вопросы……………………………………………………….44
5. Рекомендуемая литература………...………………………………..............46
Ведение
Формирование современного инженера немыслимо без знания фундаментальных инженерных дисциплин. Одной из таких дисциплин является теоретическая… Роль теоретической механики не ограничивается техническим приложением.… Неоспорима гуманитарная роль: знание законов и методов теоретической механики позволяет изучать и объяснять явления,…Рабочая учебная программа
Цели и задачи дисциплины Задача дисциплины – формирование и развитие у студентов комплекса знаний, умений и навыков для постановки и решения…Рекомендации по выполнению контрольной работы
В зависимости от специальности и формы обучения (сокращённая или полная) предусматривается решение задач, соответствующих индексам, приведенным в… Таблица 1. Полная форма обучения Спец. Курс … В условиях каждой задачи приведены по 10 схем и по 10 вариантов исходных данных.В каждой задаче студент выбирает номер схемы по последней цифре учебного шифра, номер исходных данных – по предпоследней цифре учебного шифра.
Решение каждой задачи следует начинать с новой страницы. Условия задачи записывать в краткой форме. Чертеж выполнять аккуратно, четко, показывая оси… Уравнения равновесия необходимо составлять и решать относительно неизвестных в… Выписать ответ и произвести его анализ.Пример решения задачи К 2
Плоский механизм (рис.3а) состоит из стержней 1, 2, 3 и ползунов  ,
,  , соединенных друг с другом и с неподвижной опорой
, соединенных друг с другом и с неподвижной опорой  шарнирами.
шарнирами.
Определить скорости ползунов , , угловую скорость звена  , ускорение точки и угловое ускорение звена
, ускорение точки и угловое ускорение звена  .
.
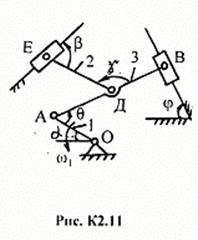
Рис.3а
Дано:  м,
м,  м,
м,  .
. 
 ,
,  ,
,  ,
,  ,
,  ,
,  1/с,
1/с,  1/с2.
1/с2.
Определить:  ,
,  ,
,  ,
,  ,
,  .
.
Решение
1. Строим схему механизма в выбранном масштабе с соблюдением заданных значений углов (рис.3б).
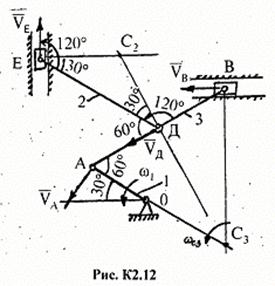
Рис.3б
2. Определяем типы движения тел. Стержень  совершает вращательное движение; стержни и – плоско-параллельное, ползуны и – поступательное движение.
совершает вращательное движение; стержни и – плоско-параллельное, ползуны и – поступательное движение.
3. Определяем скорости точек звеньев.
Определяем скорость точки  , принадлежащей стержню .
, принадлежащей стержню .
 м/с,
м/с, 
Изображаем вектор  на схеме механизма.
на схеме механизма.
Определяем скорость точки , принадлежащей стержню . Точка одновременно принадлежит ползуну , поэтому направление  известно – вдоль направляющих. Применим теорему о проекциях скоростей двух точек твердого тела
известно – вдоль направляющих. Применим теорему о проекциях скоростей двух точек твердого тела
 , откуда
, откуда
 м/с
м/с
Определяем скорость точки Д. Направление  неизвестно, поэтому необходимо воспользоваться мгновенным центром скоростей (МЦС). Строим МЦС стержня 3, который находится в точке
неизвестно, поэтому необходимо воспользоваться мгновенным центром скоростей (МЦС). Строим МЦС стержня 3, который находится в точке  на пересечении перпендикуляров к векторам скоростей
на пересечении перпендикуляров к векторам скоростей  ,
,
 ;
;  ;
; 
Треугольник  - равносторонний, следовательно,
- равносторонний, следовательно, 
 1/с
1/с
Из 
 м
м
 м/с
м/с
Так как  , то вектор направлен по линии в сторону вращения
, то вектор направлен по линии в сторону вращения  .
.
Определяем скорость точки Е. Точка принадлежит стержню и одновременно ползуну , поэтому направление  известно – вдоль направляющих. Применим теорему о проекциях скоростей двух точек твердого тела
известно – вдоль направляющих. Применим теорему о проекциях скоростей двух точек твердого тела
 , откуда
, откуда
 м/с
м/с
Определяем  . Угловая скорость стержня равна угловой скорости радиуса
. Угловая скорость стержня равна угловой скорости радиуса  относительно мгновенного центра
относительно мгновенного центра 
 ; треугольник
; треугольник  - равнобедренный
- равнобедренный
 м;
м;  1/с
1/с
Определяем ускорение точки , принадлежащей стержню

 м/с2;
м/с2; 
 м/с2;
м/с2; 
Изобразим векторы  ,
,  на схеме.
на схеме.
4. Определяем ускорение точки , принадлежащей стержню .
 , (1)
, (1)
Так как точка одновременно принадлежит ползуну , двигающему прямолинейно, то  ,
,  - направлено вдоль направляющих.
- направлено вдоль направляющих.
, - найдены ранее;
 ;
;  ,
,  - не известно
- не известно
 м/с2,
м/с2, 
Покажем векторы ,  ,
,  на схеме (рис. 3в).
на схеме (рис. 3в).

Рис. 3в
Модуль ускорения определим по формуле
Проведем оси 
 , причем ось
, причем ось  направим перпендикулярно неизвестному вектору . Запишем уравнение (2) в проекциях на ось .
направим перпендикулярно неизвестному вектору . Запишем уравнение (2) в проекциях на ось .
 , откуда
, откуда
 м/с2
м/с2
 м/с2,
м/с2, 
5. Определим угловое ускорение стержня

Запишем уравнение (2) в проекциях на ось
 , откуда
, откуда
 м/с2
м/с2
 1/с2
1/с2
Ответ:  м/с,
м/с,  м/с,
м/с,  1/с,
1/с,  м/с2,
м/с2,  1/с2
1/с2
2.5. Методические рекомендации к решению задачи Д 1
Задача Д1 на определение закона поступательного прямолинейного движения твердого тела при действии на него системы сил.
Задача относится ко второй основной задаче динамики и решается путем интегрирования дифференциального уравнения движения материальной точки (тело при поступательном движении рассматривается как материальная точка).
Последовательность решения задачи
1. Изобразить тело в произвольном промежуточном на траектории положении.
2. Показать все внешние силы, действующие на тело (в т.ч. реакции связей).
3. Провести оси координат. (Во избежание дополнительных затруднений с правилом знаков целесообразно одну ось направить по направлению движения тела).
4. Записать дифференциальное уравнение движения материальной точки в общем виде, после чего раскрыть правую часть уравнения в соответствии со схемой сил.
5. Решить полученное дифференциальное уравнение.
В задачах данного задания тело движется по двум участкам траектории, на которых на тело действуют различные системы сил. В связи с этим законы движения тела на участках будут различны и решение задачи необходимо разбить на этапы. На первом этапе рассмотреть движение тела на участке , на втором этапе – на участке  . При этом необходимо учитывать, что по условию задачи скорость тела в конце первого является начальной для второго участка траектории.
. При этом необходимо учитывать, что по условию задачи скорость тела в конце первого является начальной для второго участка траектории.
Если по условию задачи задано не время движения на участке , а длина этого участка, то в дифференциальном уравнении следует произвести замену переменной  на переменную, характеризующую перемещение, например координату
на переменную, характеризующую перемещение, например координату 
 .
.
Пример решения задачи Д1
Груз массой  , получив в точке начальную скорость
, получив в точке начальную скорость  , движется в трубе
, движется в трубе  (Рис 4), расположенной в вертикальной плоскости. На участке на груз, кроме силы тяжести, действуют сила
(Рис 4), расположенной в вертикальной плоскости. На участке на груз, кроме силы тяжести, действуют сила  и сила сопротивления среды
и сила сопротивления среды  . С достигнутой на участке скоростью груз в точке переходит на движение по участку . На этом участке на груз кроме силы тяжести действует сила
. С достигнутой на участке скоростью груз в точке переходит на движение по участку . На этом участке на груз кроме силы тяжести действует сила  , направленная по линии движения груза (ось ) и сила трения скольжения. Коэффициент трения
, направленная по линии движения груза (ось ) и сила трения скольжения. Коэффициент трения  .
.
Найти закон движения груза на участке .
Дано:  кг,
кг,  м/с,
м/с,  Н,
Н,  Н,
Н,
 с,
с,  ,
,  Н
Н
Определить: закон движения на участке , т.е. 
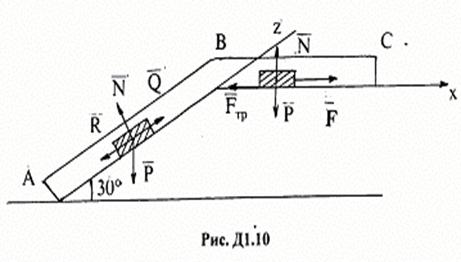
Рис. 4
Решение
1. Рассмотрим движение груза на участке , считая его материальной точкой. На груз действует:  - сила тяжести,
- сила тяжести,  - реакция опоры, силы и . Покажем действующие силы на схеме.
- реакция опоры, силы и . Покажем действующие силы на схеме.
Проведем ось  по направлению движения груза и составим дифференциальное уравнение в проекциях на эту ось.
по направлению движения груза и составим дифференциальное уравнение в проекциях на эту ось.
 , (1)
, (1)
Решим полученное дифференциальное уравнение, методом разделения переменных, предварительно выполнив необходимые преобразования.

Для сокращения записи подставим числовые значения

Разделим переменные и проинтегрируем
 ;
;
 ; (2)
; (2)
Определим постоянную интегрирования  по начальным условиям:
по начальным условиям:  ,
,  м/с.
м/с.
Подставим эти значения переменных в уравнение (2)
 ,
,  .
.
Подставим найденное значение в уравнение (2)
 (3)
(3)
Преобразуем уравнение (3)

 ;
; 
 (4)
(4)
Из равенства логарифмов (4) с одинаковым основанием следует равенство логарифмируемых выражений
 ;
; 
Скорость в точке при  с
с
 м/с (5)
м/с (5)
2. Рассмотрим движение груза на участке . На груз действует сила:  - сила тяжести,
- сила тяжести,  - сила трения, - реакция опоры и заданная сила
- сила трения, - реакция опоры и заданная сила  .
.
Покажем действующие на тело силы на схеме, при этом учтем, что сила трения направлена противоположно движению тела.
Составим дифференциальное уравнение движения груза в проекциях на ось
 , (6)
, (6)
Определим силу трения:
 .
.
Для определения силы  запишем дифференциальное уравнение движения груза в проекциях на ось
запишем дифференциальное уравнение движения груза в проекциях на ось 
 .
.

Так как при движении тела вдоль оси координата не изменяется (т.е.  ), то
), то  и, следовательно,
и, следовательно,  .
.
Запишем это равенство в соответствии со схемой сил  , откуда
, откуда  ;
;  .
.
Уравнение (6) примет вид
 (7).
(7).
Разделим переменные в уравнении (7) и проинтегрируем полученное выражение
 ,
,
 . (8)
. (8)
Начальные условия для участка : ,  м/с.
м/с.
Подставим начальные условия в уравнение (8) 
Учитывая, что  и
и  , уравнение (8) примет вид
, уравнение (8) примет вид
 ;
;  (9)
(9)
Проинтегрируем выражение (9)
 , (10)
, (10)
Из уравнения (10) определяем из начальных условий: , 
 ,
,  ;
; 
Окончательно уравнение движения груза примет вид:

Ответ: Закон движения груза на участке 
2.6. Методические рекомендации к решению задачи Д 2
Рассматриваемая задача на определение кинематических характеристик механической системы при действии на нее системы внешних сил. Для решения задачи целесообразно применить одну из общих теорем системы – теорему об изменении кинетической энергии механической системы
 ,
,
где:  ,
,  - кинетическая энергия системы в начальном и конечном состоянии,
- кинетическая энергия системы в начальном и конечном состоянии,
 - сумма работ внешних сил
- сумма работ внешних сил
Последовательность решения задачи
1. Изобразить схему механической системы, показать действующие на нее внешние силы и направление скоростей тел.
2. Записать математическое выражение теоремы об изменении кинетической энергии механической системы.
3. Вычислить изменение кинетической энергию системы в начальном и конечном состояниях.
4. Вычислить сумму работ внешних сил при перемещении системы.
5. Подставить найденные значения кинетической энергии и работы сил в исходное выражение. Вычислить значение искомой кинематической характеристики.
Краткие теоретические сведения
Кинетическая энергия механической системы равна сумме кинетических энергий всех ее частей  ,
,
где  - кинетическая энергия
- кинетическая энергия  -той части системы.
-той части системы.
Кинетическая энергия твердых тел определяется по формулам:
 - при поступательном движении тела;
- при поступательном движении тела;
 - при вращательном движении тела, где
- при вращательном движении тела, где
 - момент инерции тела относительно оси вращения;
- момент инерции тела относительно оси вращения;
 - при плоско-параллельном движении тела, где
- при плоско-параллельном движении тела, где
 - скорость центра масс тела,
- скорость центра масс тела,
 - момент инерции тела относительно центра
- момент инерции тела относительно центра  .
.
Работа силы вычисляется по формулам:
 , при
, при  ;
;
 , при
, при  ,
,
где  - угол между направлением вектора силы и направлением перемещения точки приложения силы.
- угол между направлением вектора силы и направлением перемещения точки приложения силы.
При решении задачи:
· линейные и угловые скорости, входящие в формулы кинетической энергии, необходимо выразить через искомую скорость;
· перемещения тел выразить через перемещение, заданное условием задачи.
Пример решения задачи Д2
Механическая система (рис.5) состоит из сплошного катка 1 массой  , ступенчатого шкива 2 массой
, ступенчатого шкива 2 массой  с радиусами
с радиусами  ,
,  и радиусом инерции
и радиусом инерции  , груза 3 массой
, груза 3 массой  и блоков 4, 5. К блоку 5 присоединена пружина с коэффициентом жесткости . Система приходит в движение под действием силы , приложенной к катку 1. При этом кроме сил тяжести и упругости пружины действуют сила трения груза 3 (коэффициент трения ) и момент сопротивления вращению шкива 2 -
и блоков 4, 5. К блоку 5 присоединена пружина с коэффициентом жесткости . Система приходит в движение под действием силы , приложенной к катку 1. При этом кроме сил тяжести и упругости пружины действуют сила трения груза 3 (коэффициент трения ) и момент сопротивления вращению шкива 2 -  .
.
Определить скорость центра  катка при перемещении его на расстояние
катка при перемещении его на расстояние  .
.
Дано:  кг,
кг,  кг,
кг,  кг,
кг,  ,
,
 м,
м,  м,
м,  Нм,
Нм,  .
.
 м,
м,  Н/м,
Н/м,  Н
Н
Определить 
Решение
Для решения задачи применим теорему об изменении кинетической энергии системы:
 (1)
(1)
1. Изобразим схему механической системы, покажем все действующие на нее внешние силы (рис. 5).
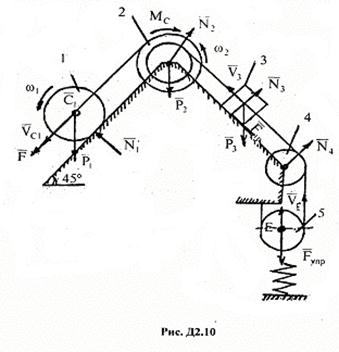
Рис.5
- заданная сила, - сила трения,
 - сила упругости пружины,
- сила упругости пружины,  ,
,  ,
,  ,
,  - реакции связей,
- реакции связей,
 ,
,  ,
,  - силы тяжести тел, - момент сопротивления.
- силы тяжести тел, - момент сопротивления.
2. Определим кинетическую энергию системы в начальном и конечном положении.
Покажем на схеме линейные и угловые скорости тел:
 ,
,  ,
,  ,
,  ,
,
В начальном положении кинетическая энергия системы равна нулю, так как система в этот момент неподвижна
 .
.
В конечном положении кинетическая энергия системы равна сумме кинетических энергий тел, составляющих систему
 ,
,
где  ,
,  ,
,  -кинетическая энергия тел 1, 2, 3 соответственно.
-кинетическая энергия тел 1, 2, 3 соответственно.
Тело 1 совершает плоско-параллельное движение
 , где
, где  .
.
Тело 2 вращается вокруг неподвижной оси
 , где
, где  .
.
Тело 3 движется поступательно
 .
.
Выразим скорости тел через искомую
 ;
;  ;
; 
С учетом полученных выражений кинетическая энергия системы

 . (2)
. (2)
4. Вычислим работу внешних сил (силы показаны на схеме). Предварительно выразим перемещения тел через заданное . Учтем, что соотношения между перемещениями тел такие же, как между соответствующими скоростями.
 ;
;  ;
;  ;
; 
 Дж
Дж
 Дж
Дж
 Дж
Дж
 Дж
Дж
 Дж
Дж
 Дж
Дж
Точки приложения сил , , , не перемещаются
 .
.
На основании найденных значений работ
 Дж. (3)
Дж. (3)
5. Подставим найденные значения (2) и  (3) в уравнение (1)
(3) в уравнение (1)
 , откуда
, откуда
 м/с
м/с
Ответ:  м/с
м/с
2.7. Методические рекомендации к решению задачи Д3
Задача Д3 – на применение к изучению движения механической системы принципа Даламбера. Принцип заключается в следующем: если к действующим на механическую систему внешним силам присоединить силы инерции, то полученная система сил будет уравновешенной, т.е.
 , (1)
, (1)
где:  - сумма внешних сил,
- сумма внешних сил,  - сумма сил инерции.
- сумма сил инерции.
Применение уравнения (1) упрощает решение задач динамики. По существу, это уравнение эквивалентно уравнению равновесия статики.
Как известно (см. /1/, 133…135 ) сила инерции материальной точки равна
 .
.
При движении твердых тел с ускорением возникает система распределенных сил инерции. В этом случае систему распределенных сил инерции приводят к главному вектору  и главному моменту
и главному моменту  сил инерции.
сил инерции.
При поступательном движении:  ,
,  ,
,
где - суммарная масса тела,  - ускорение центра масс тела.
- ускорение центра масс тела.
При вращательном движении: ,  ,
,
где  - момент инерции тела относительно оси вращения
- момент инерции тела относительно оси вращения  ,
,
 - угловое ускорение тела
- угловое ускорение тела
В случае, когда ось вращения проходит через центр масс,  и
и  , система сил инерции сводится к одному главному моменту сил инерции
, система сил инерции сводится к одному главному моменту сил инерции

При решении задач по приведенным формулам вычисляют модули , , а направления действия, показывают на чертеже.
Пример решения задачи Д3
Однородный стержень длиной  , массой прикреплен под углом к вертикальному валу, вращающемуся с постоянной угловой скоростью ω (Рис.6).
, массой прикреплен под углом к вертикальному валу, вращающемуся с постоянной угловой скоростью ω (Рис.6).
Вал закреплен в подпятнике и в цилиндрическом подшипнике . Отрезки  .
.
Определить реакции связей.
Дано: , ,  , ,
, ,  .
.
Определить реакции связей и .
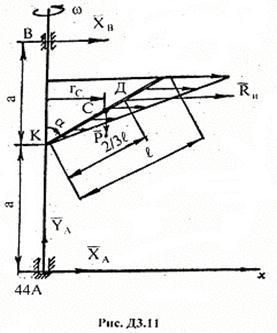
Рис.6
Решение
Применим для решения задачи принцип Даламбера.
1. Строим расчетную схему. Покажем действующие на механическую систему силы: силу тяжести  , реакции связей
, реакции связей  ,
,  ,
,  , силы инерции элементов однородного стержня. Так как вал вращается равномерно, то элементы стержня имеют только нормальные ускорения
, силы инерции элементов однородного стержня. Так как вал вращается равномерно, то элементы стержня имеют только нормальные ускорения  , где
, где  - расстояние элементов стержня от оси вращения. Силы инерции элементов стержня направлены от оси вращения и численно равны
- расстояние элементов стержня от оси вращения. Силы инерции элементов стержня направлены от оси вращения и численно равны
 .
.
Эпюра сил инерции элементов стержня образует треугольник. Полученную систему параллельных сил заменим равнодействующей, равной главному вектору этих сил.
 ,
,
где  - вектор ускорения центра масс стержня
- вектор ускорения центра масс стержня
Линия действия равнодействующей должна проходить через центр тяжести эпюры распределенной системы сил инерции.
Таким образом, равнодействующая сил инерции стержня численно равна

Вектор силы приложен в т. Д, находящейся на расстоянии (2/3)l от точки  .
.
Полученная система сил  уравновешена. Условия и уравнения равновесия
уравновешена. Условия и уравнения равновесия
 ;
;  (1)
(1)
;  (2)
(2)
 ;
;  (3)
(3)
Решим полученную систему уравнений. Из уравнения (2):  .
.
Из уравнения (3):
 .
.
Из уравнения (1):

Ответ: 


Контрольные задания
При разработке настоящего учебного пособия в качестве контрольных заданий приняты задания, рекомендованные в методическом пособии под редакцией С.М. Тарга.
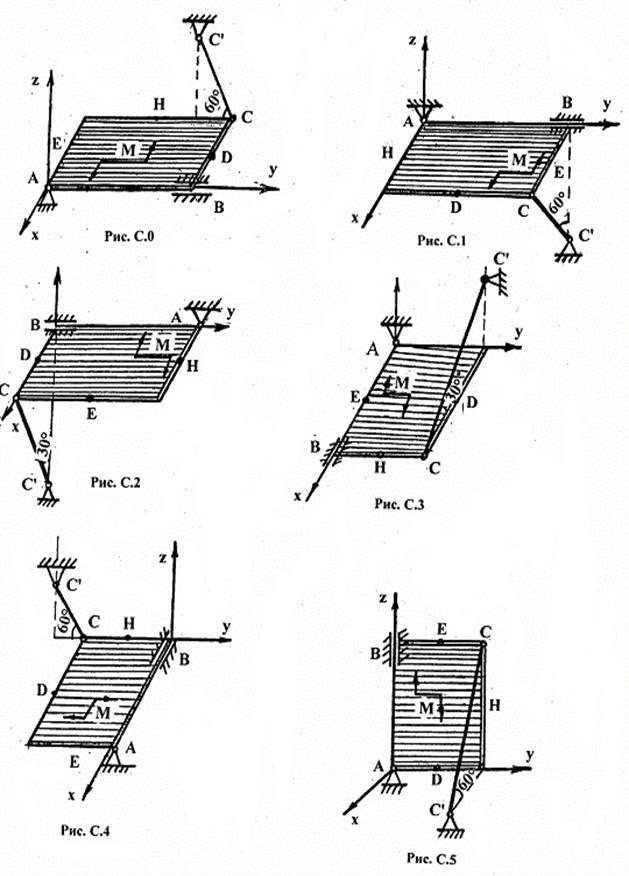
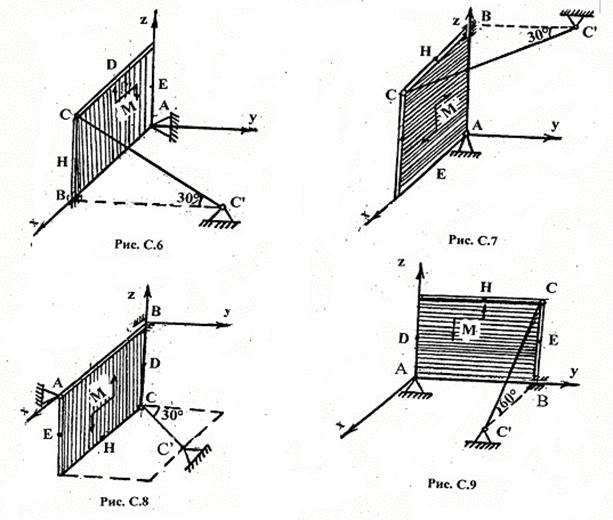
Задача С
При расчетах принять м. Определить реакции связей в точках .Таблица С.
| Сила | 
| 
| 
| |||
| Условия |  кН кН
|  кН кН
|  кН кН
| |||
| Точка приложения | 
| Точка приложения | 
| Точка приложения | 
| |
| Д | Е | |||||
| Н | Д | - | - | |||
| Д | Е | - | - | |||
| Н | - | - | Е | |||
| Е | - | - | Н | |||
| - | - | Д | Н | |||
| Д | Н | - | - | |||
| Е | Н | - | - | |||
| Е | - | - | Д | |||
| - | - | Е | Д |
Задача К1
Точка движется в плоскости (рис. К1.0…К1.9; траектория точки на рисунке показана условно). Закон движения точки задан уравнениями , , где и выражены… Найти уравнение траектории точки, определить скорость и ускорение точки, а… В некоторых вариантах задачи в процессе решения следует выполнить необходимые тригонометрические преобразования, а…Задача К2
Плоский механизм состоит из стержней, соединенных между собой и с неподвижными опорами цилиндрическими шарнирами. Схемы механизмов приведены на… Заданы угловая скорость и угловое ускорение одного из стержней механизма или… Положительным направлением угловых скоростей и ускорений считать против хода часовой стрелки, линейных скоростей и…Задача Д 1
Тело массой движется поступательно по траектории , расположенной в вертикальной плоскости. Участки траектории и прямолинейны. В точке тело имеет начальную скорость . Кроме того задана длина участка или… На указанных участках на тело действуют различные системы сил: кроме силы тяжести и реакции опоры на участке действует…Задача Д2
Механическая система состоит из груза 1 массой , ступенчатого шкива 2 массой с радиусом , и радиусом инерции , шкива 3 с радиусом и распределенной… Система из состояния покоя приходит в движения под действием силы ,… Значение входящих в условие задачи величин приведены в табл. Д2, схемы механизмов – на рис. Д2.0, …, Д2.9.Задача Д3
Вертикальный вал (рис. Д3.0…Д3.9, табл. Д3), вращающийся с постоянной угловой скоростью с-1, закреплен подпятником в точке и цилиндрическим… Пренебрегая весом вала, определить реакции подпятника и подшипника. При…Контрольные вопросы
1. Основное содержание теоретической механики.
2. Основные разделы теоретической механики. Основное содержание разделов.
3. Дайте определения основных понятий статики (абсолютно твердого тела, материальной точки, силы, системы сил, классификации систем сил).
4. Аксиомы статики.
5. Связи и реакции связей.
6. Сложение сил (графическое, аналитическое).
7. Момент силы относительно центра и относительно оси.
8. Момент силы как вектор.
9. Пара сил. Момент пары сил. Свойства пары сил.
10. Сложение пар в плоскости и в пространстве.
11. Теорема о параллельном переносе силы.
12. Приведение системы сил к заданному центру.
13. Условия равновесия систем сил в аналитической и геометрической форме.
14. Методика определения реакций связей.
15. Трение. Условия равновесия при наличии сил трения.
16. Центр параллельных сил.
17. Центр масс (тяжести) твердого тела. Формулы для определения центра масс (тяжести) твердого тела.
18. Что изучает кинематика?
19. Способы задания движения точки. Основные формулы, определяющие кинематические характеристики точки при различных способах задания движения.
20. Поступательное движение твердого тела.Свойства кинематических характеристик точек тела при поступательном движении.
21. Вращательное движение вокруг неподвижной оси, способ задания движения и определение кинематических характеристик тела и его точек.
22. Плоскопараллельное движение твердого тела, способ задания движения и определение кинематических характеристик точек тела.
23. Сложное движение точки. Теорема Кориолиса. Метод Жуковского.
24. Сферическое движение твердого тела.
25. Сложное движение точки. Определение кинематических характеристик точки.
26. Сложное движение твердого тела.
27. Что изучает динамика?
28. Основные понятия динамики: масса, момент инерции, импульс силы, работа силы, количество движения, кинетическая энергия, мощность.
29. Аксиомы динамики.
30. Прямая (первая) и обратная (вторая) основные задачи динамики.
31. Дифференциальные уравнения движения точки в декартовой и естественной системах координат.
32. Дифференциальные уравнения вращательного движения твердого тела.
33. Дифференциальные уравнения относительного движения точки и механической системы.
34. Прямолинейные колебания материальной точки. При каких условиях возникают гармонические колебания? Вид дифференциального уравнения гармонических колебаний и физический смысл его коэффициентов.
35. При каких условиях возникают затухающие колебания? Вид дифференциального уравнения затухающих колебаний и физический смысл его коэффициентов.
36. Вид дифференциального уравнения вынужденных колебаний. При каких условиях возникает резонанс.
37. Теорема о движении центра масс системы.
38. Теорема об изменении количества движения точки и механической системы.
39. Теорема об изменении количества движения точки и системы.
40. Теорема об изменении момента количества движения точки и системы.
41. Теорема об изменении кинетической энергии точки и системы.
42. Интегральная и дифференциальная формы записи общих теорем динамики.
43. Принцип Даламбера.
44. Принцип возможных перемещений. Число степеней свободы системы. Формула Чебышева.
45. Общее уравнение динамики.
46. Обобщенные координаты и скорости, их связь с числом степеней свободы. Обобщенные силы.
47. Условия равновесия в обобщенных координатах.
48. Уравнение Лагранжа ІІ рода.
49. Понятие об устойчивости равновесия
50. Малые колебания системы с одной степенью свободы.
51. Малые колебания системы с двумя степенями свободы.
52. Основы теории удара.
53. Основное уравнение теории удара.
54. Общие теоремы теории удара.
55. Коэффициент восстановления при ударе.
56. Теорема Карно.
57. Абсолютно упругий и абсолютно неупругий удары.
Рекомендуемая литература
Основная:
1. Тарг С.М. Краткий курс теоретической механики. – М.: Высшая школа, 2007 и другие издания.
2. Яблонский А.А., Никифорова В.Н. Курс теоретической механики. – М.: “OSON”, 2006 и другие издания.
3. Яблонский А.А. Сборник задач по теоретической механике. – М.: «Интеграл-Пресс», 2006 и другие издания.
Дополнительная:
5. Гернет М.М. Курс теоретической механики. – М.: ВШ, 1981 и другие издания.
5. Мещерский И.В. Сборник задач по теоретической механике. М.: 1989 и другие издания.
6. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. Т1,2 – М.: Наука, 1984 и другие издания
Для замечаний
Буторин Леонид Васильевич
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Рабочая программа, методические документы,
контрольные задания
Тираж 150 экз.
Заказ