С помощью принципа Даламбера-Лагранжа
Общее уравнение динамики системы есть математическое выражение принципа Даламбера-Лагранжа
 . (4.1)
. (4.1)
Здесь  - сумма элементарных работ всех активных сил на возможном перемещении системы;
- сумма элементарных работ всех активных сил на возможном перемещении системы;
 - сумма элементарных работ всех сил инерции на возможном перемещении системы.
- сумма элементарных работ всех сил инерции на возможном перемещении системы.
Изобразим на рисунке активные силы и силы инерции (рис.4). 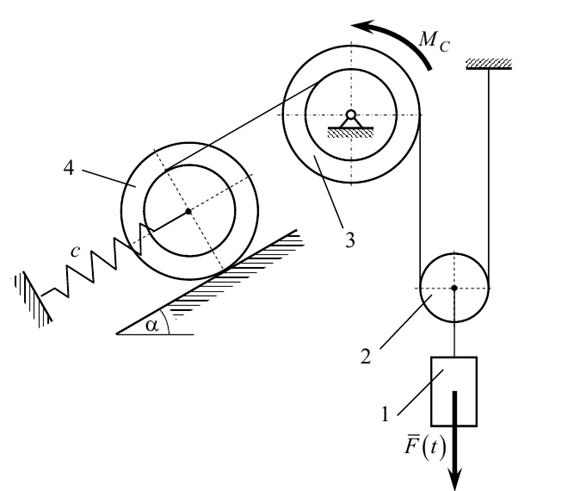
Рис. 4. Расчетная схема
Идеальные связи  не учитывают и не отображают на расчетной схеме, поскольку по определению работа их реакций ва любом возможном перемещении системы равна нулю. Пружина является неидеальной связью. Введем реакцию этой связи в число активных сил.
не учитывают и не отображают на расчетной схеме, поскольку по определению работа их реакций ва любом возможном перемещении системы равна нулю. Пружина является неидеальной связью. Введем реакцию этой связи в число активных сил.
Сообщим системе возможное перемещение. Возможная работа активных сил определяется как сумма следующих элементарных работ:

 (4.2)
(4.2)
Вычисляя последовательно элементарные работы активных сил и суммируя их, получаем после несложных преобразований
 (4.3)
(4.3)
Аналогичное выражение для приведенной силы Fпр получено ранее [см. (1.18)].
Найдем возможную работу сил инерции:

(4.4)
Для величин главных векторов и главных моментов сил инерции имеем следующие выражения:


Ф4=m4 (4.5)
(4.5)
Используя кинематические соотношения (1.7), можно записать

 (4.6)
(4.6)

Тогда возможную работу сил инерции можно преобразовать к виду
 , (4.7)
, (4.7)
где mпр= , (4.8)
, (4.8)
Аналогичное выражение для приведенной массы системы было получено ранее [см.(1.10)]. Подставляя выражения (4.3) и (4.8) в общее уравнение динамики (4.1), получаем
 (4.9)
(4.9)
Поделив (3.10) на  , получим дифференциальное уравнение вынужденных колебаний системы:
, получим дифференциальное уравнение вынужденных колебаний системы:
 , (4.10)
, (4.10)
где 
 (4.11)
(4.11)
Дифференциальное уравнение (4.10) полностью совпадает с полученным ранее уравнением (1.20).