рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Электротехника
- /
- Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД
Реферат Курсовая Конспект
Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД
Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД - раздел Электротехника, СИСТЕМЫ ВЕКТОРНОГО ЧАСТОТНО-ТОКОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ Установка Датчиков Магнитного Поля В Воздушном Зазоре Ад В Си...
Установка датчиков магнитного поля в воздушном зазоре АД в системах прямого управления векторами его потокосцеплений требует дополнительных изменений в конструктивных решениях серийно выпускаемых АД и сопровождается снижением надежности электропривода. Поэтому в современных и наиболее совершенных частотно-регулируемых электроприводах, где системы программного управления реализованы на основе микропроцессорной техники, информация о векторах потокосцеплений электрической машины получается косвенным путем на основе ее математических моделей.
Так, в электроприводах серии Simovert Masterdrives VC фирмы Siemens наиболее развиты системы управления скоростью АД с косвенной ориентацией по вектору потокосцепления его ротора [14]. Модульный принцип построения их систем управления создает возможность комбинаций различных структур управления моментом и скоростью АД, включая как прямое (с помощью тахогенератора), так и косвенное (по модели) определение реальной скорости двигателя. Выбор структур управления определяется технологическими требованиями к электроприводу и его эксплуатационными особенностями.
7.3.1. Системы управления скоростью АД
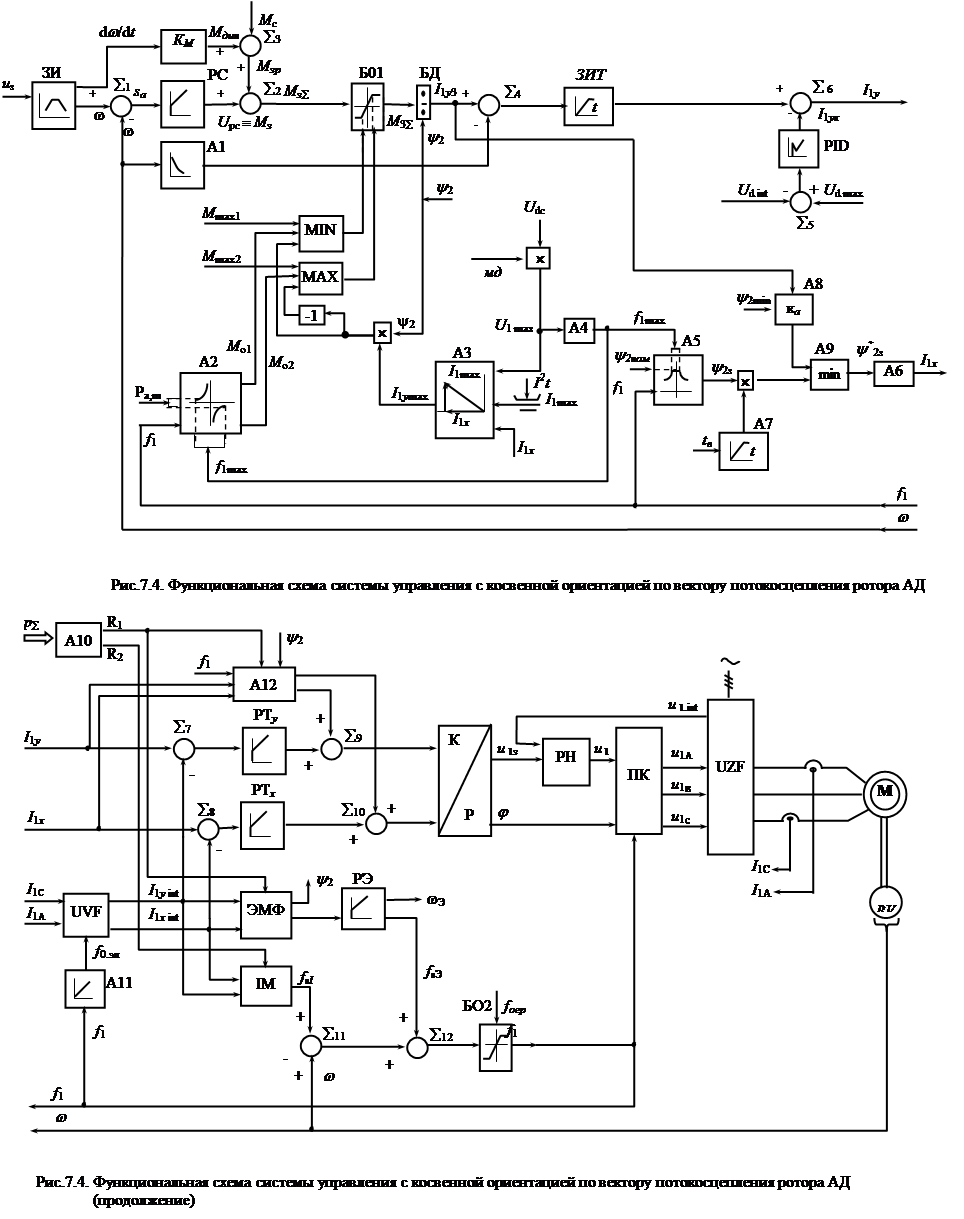
На рис 7.4 представлена функциональная схема системы управления электроприводом серии Simovert Masterdrives VC с отрицательной обратной связью по реальной скорости АД. Система имеет два основных канала управления - угловой скоростью w и модулем потокосцепления ротора çY2ç АД, а также два подчиненных им
внутренних контура регулирования составляющих тока статора I1x и I1у в осях х и у ортогональной системы координат, вращающейся с синхронной скоростью w0эл магнитного поля двигателя.
Сигнал задания скорости АД uз предварительно поступает на вход задатчика интенсивности ЗИ, формирующего на выходе два сигнала управления. Основной wз определяет задание скорости АД с темпом, обеспечивающим ограничение рывков и ускорений в соответствии с технологическими требованиями к электроприводу и максимально допустимыми динамическими перегрузками по току и электромагнитному моменту АД. Дополнительный сигнал dw /dt определяет с учетом коэффициента передачи Км, пропорционального приведенному к валу АД результирующему его моменту инерции, задание динамической составляющей электромагнитного момента Мдин . Результат его суммирования на å3 с сигналом Мс, пропорциональным статическому моменту сил сопротивления на валу АД, формирует задание электромагнитного момента АД Мзр. При этом определение реального сигнала Мс и, соответственно, практическая реализация задания электромагнитного момента требуют наличия датчика статического момента на валу АД. Однако техническая сложность, заметные метрологические погрешности существующих датчиков статического момента на вращающихся валах электрических машин и отсутствие серийного их выпуска, как правило, ограничивают их применение в системах электропривода.
Сигнал рассогласования sа на выходе сумматора å1 основного сигнала управления wз и сигнала w реальной скорости АД с выхода тахогенератора BV, пропорциональный абсолютному скольжению АД, поступает на вход пропорционально-интегрального регулятора скорости РС. Его выходной сигнал uрс формирует сигнал задания Мз электромагнитного момента, необходимого для полной компенсации скольжения АД. На выходе сумматора å2 результирующий сигнал Мзå определяет полное задание электромагнитного момента с учетом возможных изменений статической и динамической составляющих нагрузок на валу АД.
Подобная комбинированная система задания момента (по возмущению и отклонению) применяется в основном для электроприводов, где требуются повышенные динамические показатели качества регулирования. В наиболее распространенных электроприводах канал управления по возмущению, как правило, используется редко, поскольку требует дополнительной и не всегда точно известной информации о реальных значениях статической нагрузки и моментов инерции на валу двигателя. К тому же два параллельно действующих канала управления по отклонению и возмущению требуют более тщательной их настройки и взаимного согласования. С учетом этого в структуре управления электроприводом серии Simovert Masterdrives VC предусмотрена возможность отключения либо всего дополнительного канала по возмущению, либо сохранения канала коррекции лишь по динамической составляющей момента.
Результирующий сигнал Мзå ограничивается блоком БО1 на уровне задания, соответствующего выбранному максимальному значению электромагнитного момента АД. Задание этого значения определяется внешними сигналами управления Мmax1 и Мmax2. В зависимости от энергетических режимов работы электропривода предусмотрена коррекция по ограничению максимально допустимых моментов АД (блоки MIN и MAX).
Так, при отсутствии дополнительного блока рекуперативного торможения в силовой цепи выпрямителя на входе автономного инвертора напряжения UZF для ограничения максимально допустимой рекуперируемой активной мощности Ра.m и, соответственно, ограничения перенапряжения на емкостном фильтре выпрямителя, в режиме рекуперативного торможения АД в блоке А2 в функции от скорости АД или частоты его питания f1 формируются сигналы Мо1 и Мо2 , уменьшающие уровень задания электромагнитного момента АД. Функциональная связь между Ра.m , частотой f1 с учетом ее максимального значения f1max , качественно отраженная в блоке А2, в электроприводах серии Simovert Masterdrives VC определена их математической моделью и корректируется при автоматической идентификации параметров электропривода.
Ограничение электромагнитного момента АД связано и с выбором максимально допустимого тока статора I1max. С этой целью в блоке А3 с учетом максимального значения напряжения питания АД U1max и реального значения составляющей тока статора I 1x по оси x определяется вектор максимально допустимой составляющей тока статора I1 у. max . Выходной сигнал блока произведения I1 у. max на потокосцепление ротора Y2 , пропорциональный реальному максимально допустимому электромагнитному моменту АД и контролирует ограничение выходного сигнала Мзå .
Для постоянства задания электромагнитного момента при изменении потокосцепления ротора в соответствии с определением момента по (4.42) используется блок деления БД сигнала М*зå на выходе БО1 на сигнал, пропорциональный Y2 . Выход БД формирует сигнал задания I1уз составляющей тока статора по оси у.
Для коррекции по динамической составляющей момента на валу АД в структуре управления электроприводом предусмотрена возможность подключения на вход сумматора å4 сигнала отрицательной обратной связи, пропорционального производной по скорости АД (устройство А1). Ограничение рывков по моменту АД за счет ограничения темпа изменения составляющей тока статора I1у обеспечивается задатчиком интенсивности ЗИТ. Его выходной сигнал, суммирующий на å6 с сигналом отрицательной обратной связью с выхода пропорционально-интегрально-дифференцирующего регулятора РID определяет задание на составляющую тока статора I1у .
Входом РID является выходной сигнал сумматора å5 , где сравниваются сигналы, пропорциональные текущему Ud.ist и установленному максимально допустимому Ud.max напряжениям на выходе выпрямителя UZF. Рассматриваемый узел способствует управлению моментом АД во время кратковременных отключений или возможных уменьшений напряжения питающей сети преобразователя частоты. При кратковременных отключений сети управление может быть продолжено за счет рекуперации кинетической энергии вращающегося вала АД в цепь выпрямителя UZF. При нагрузках с большим моментом инерции и высокой рабочей скоростью могут быть весьма заметные периоды поддержки рабочего состояния преобразователя.
Сигнал задания потокосцепления ротора y2з формируется в блоке А5. Функциональная связь между реальной частотой f1 выходного напряжения преобразователя и потокосцеплением ротора АД определяет постоянство y2з на уровне задания номинального потокосцепления ротора y2ном при f1 £ f1max @ f1.ном и уменьшение y2з при f1 > f1max. Последний вариант обеспечивает работу АД в зоне регулирования скорости выше номинальной при постоянстве номинального напряжения питания статора.
Cигнал f1max , корректирующий допустимую максимальную частоту выходного напряжения преобразователя UZF, формируется расчетным путем по модели АД в блоке А4 в зависимости от заданного максимально допустимого напряжения питания статора U1max . Значение U1max определяется напряжением Udc на выходе силового фильтра выпрямителя UZF с коррекцией по сигналу мд, пропорционального максимально возможной глубине модуляции выходного напряжения UZF.
Сигнал y2з задания потокосцепления ротора с выхода блока А5 в результате перемножения на выходной сигнал блока А7 преобразуется в сигнал y*2з , изменяющийся во времени с темпом, определяющим время возбуждения АД. Лишь по истечению этого времени, когда возбуждение АД достигнет установившегося значения, в системе управления преобразователем частоты появляется логический сигнал на разрешение управления преобразователем со стороны сигнала uзw управления электроприводом. Отметим здесь полное подобие условию подключения к питающему напряжению якорной цепи двигателя постоянного тока независимого возбуждения лишь при наличии его магнитного потока. Значение времени возбуждения АД может быть задано как внешним сигналом tв блока А7, так и определено при автоматической идентификации параметров АД.
В структуре управления предусмотрена возможность адаптации потока ротора к нагрузке АД, способствующая снижению суммарных магнитных потерь в машине при уменьшении нагрузки. С этой целью сигнал I1уз задания составляющей тока статора по оси у поступает на блок А8, где при заданном минимально допустимом значении потока ротора y2min и заданном коэффициенте адаптации ка формируется сигнал, определяющий поток ротора в зависимости от нагрузки АД. При включенном контуре адаптации потока ротора блок А9 выделяет минимальное значение сигнала задания y*2з .
В соответствии с (7.2) и заданием потокосцепления ротора в блоке А6 по математической модели АД определяется сигнал задания составляющей тока статора I 1x . Каждая из составляющих I 1у и I 1x тока статора сравнивается на å7 и å8 со своими текущими значениями I 1у ist и I 1x ist , которые выделяются в блоке UVF векторного преобразования токов I 1А и I 1С в цепи обмоток фаз А и С статора АД. Угол j0.эл поворота осей координат х и у, вращающихся со скоростью электромагнитного поля АД, формируется в блоке А11 согласно частоте f1.
Сигналы рассогласования задающих и реальных значений составляющих тока статора поступают на входы их соответствующих регуляторов РТх и РТу .Выходные сигналы регуляторов после суммирования на å9 и å10 с сигналами компенсации составляющих по (7.6) и учета внутренней обратной связи по ЭДС двигателя, сформированными в блоке А12, поступают на координатный преобразователь К/Р. В зависимости от его входных сигналов, пропорциональных заданию составляющих выходного напряжения преобразователя в осях х , у на выходе К/Р формируются сигналы u1з и j, определяющие соответственно амплитуду и фазу вектора напряжения в двухфазной системе координат a , b , неподвижной относительно статора АД. Регулятор напряжения РН, на входе которого сравниваются сигналы задания u1з и реального значения напряжения u1. ist на выходе выпрямителя UZF, обеспечивает стабилизацию его выходных напряжений. Сигналы задания выходного напряжения преобразователя u1 и j совместно с сигналом f1, определяющим частоту выходного напряжения преобразователя частоты, трансформируются в преобразователе координат ПК в эквивалентные сигналы u1а , u1в , u1с трехфазной системы координат, определяющие выходные напряжения UZF.
Формирование сигнала f1 задания частоты выходных напряжений UZF обеспечивается суммированием на å11 и å12 сигнала w реального значения скорости АД, поступающего с тахогенератора BV, и сигналов fsI , fsЭ, определяющих частоту скольжения АД соответственно в функции тока и ЭДС двигателя. Вычисление fsI осуществляется в блоке IM математической модели двигателя по току, на вход которого совместно с текущими значениями I 1у ist и I 1x ist составляющих тока статора в осях х , у подается сигнал R2 , пропорциональный сопротивлению ротора АД.
В блоке ЭФМ математической модели АД, на вход которого кроме текущих значений I 1у ist и I 1x ist составляющих тока статора поступает сигнал R1 , пропорциональный результирующему сопротивлению цепи статора, формируются два выходных сигнала: y2 - определяющий потокосцепление ротора, и Е1 - пропорциональный ЭДС двигателя.
В серии Simovert Masterdrives VC реализована логика управления, обеспечивающая раздельное подключение сигналов fsI и fsЭ на вход å11 и å12 в зависимости от заданной частоты выходного напряжения UZF . При малых частотах действует контур коррекции по току, обеспечивая компенсацию падения напряжения на сопротивлении статора ; при больших частотах – по ЭДС двигателя, обеспечивая коррекцию скорости АД. Выбор частоты, при которой переключаются контура коррекции, определяется экспериментально по аналогии с настройкой соотношений U1/f1 в разомкнутых структурах скалярного управления АД (раздел 5.2). Максимально допустимая частота выходного напряжения UZF ограничивается сигналом fогр блока БО2.
Значения сигналов R1 и R2 формируются в блоке А10 тепловой модели АД, куда поступает совокупность сигналов рå , включающих в себя информацию о сопротивлениях цепи статора и ротора, определенных при автоматической идентификации параметров двигателя, степени влияния на них температуры собственно двигателя и окружающей среды, условий охлаждения двигателя, о наличие выходных фильтров преобразователя.
В соответствии с принципом работы рассматриваемой системы управления на рис.7.5 приведены качественные зависимости ее основных переменных в функции от момента АД при постоянном сигнале задания скорости (рис. 7.5, а) и в функции от сигнала управления скоростью при постоянном статическом моменте Мс ¹ 0 (рис.7.5, б).
Как результат действия ПИ-регулятора скорости механическая характеристика АД имеет в области нагрузок Мс < Мс.max абсолютную статическую жесткость (линия 1 на рис.7.5, а1), а при Мс ³ Мс.max механическая характеристика за счет ограничения выходного сигнала регулятора скорости и ПИ-регуляторов составляющих тока статора в осях х , у абсолютно мягкая (линия 2-3 на рис.7.5, а1). Стабилизация скорости связана с увеличением выходного сигнала регулятора скорости uрс и соответствующим увеличением сигнала задания М*зå электромагнитного момента АД (рис.7.5, а7). Последнее приводит к увеличению напряжения U1 и частоты f1 на выходе UZF по мере увеличения статической нагрузки Мс1 (рис.7.5, а2, а3) и, соответственно, увеличению по сравнению с исходной w0.0 скорости идеального холостого хода w0.1 (при Мс1) двигателя. Штриховые линии механических характеристик АД на рис.7.5, а1 отражают перемещение исходной характеристики М0 при увеличении нагрузки.
При Мс = Мс.max , когда произойдет ограничение выходного сигнала uрс на уровне максимального значения М*зå max блока БО1, и при абсолютной скорости АД, равной нулю, напряжение U1 и частота f1 будут соответствовать значениям (точки 3 на рис.7.5, а2, а3), при которых скорость идеального холостого хода АД равной w0.с (рис.7.5, а1).
По мере увеличения нагрузки составляющая I 1у тока статора, определяющая момент АД, также увеличивается (рис.7.5, а4), а составляющая I 1x , как и определяемое ею потокосцепление ротора y2 сохраняются постоянными (рис.7.5, а5, а6).
При отсутствии сигнала задания скорости АД (uз =0) и наличии на его валу постоянного реактивного момента сил сопротивления Мс ¹ 0 начальные выходное напряжение U1.0 и частота f1.0 преобразователя равны нулю. Если же момент сил сопротивления активен, то выходное напряжение U1.0 и частота f1.0 преобразователя соответствуют значениям, при которых начальная скорость идеального хода АД w0.0 ¹ 0 и механическая характеристика двигателя обеспечивает при w = 0 момент Мс (рис.7.5, б2, б3). Соответственно этому моменту определяются и начальные сигналы uрс. 1, М*зå.1 , I 1у.1 (рис.7.5, б6, б7). При этом сигналы I 1x.1 и y2.1 определяют номинальное потокосцепление ротора (рис.7.5, б5, б6).
По мере увеличения сигнала uз напряжение U1 и частота f1 на выходе преобразователя UZF также увеличиваются. При uз = uзн выходное напряжение UZF и его частота достигают номинальных значений U1ном и f1ном. В соответствии с ними устанавливается номинальное значение скорости идеального холостого хода АД w0.ном. Дальнейшее увеличение uз и частоты f1 сопровождается постоянством напряжения U1 = U1ном на выходе UZF и переходом работы АД в зону уменьшения потокосцепления ротора за счет снижения составляющей I 1x тока статора (рис.7.5, б5, б6). Максимальный момент АД при этом также уменьшается.
При uз = uзmax скорость идеального холостого хода АД устанавливается на максимально заданном уровне w0.max , соответствующем f1.огр (точка 2 на рис.7.5, б). Составляющая тока статора и соответствующее ей потокосцепление ротора устанавливаются при этом на минимальном уровне I 1x.2 и y2.2 (рис.7.5, б5, б6).
В приведенной системе управления диапазон регулирования скорости АД при номинальной нагрузке и точности регулирования скорости на уровне 5% с учетом двухзонного регулирования практически достигает 1:50 при использовании аналогового тахогенератора и 1:200 при применении цифрового датчика скорости.
Возможность избежать применения тахогенератора как элемента, требующего дополнительной, точной и надежной его установки на валу АД, реализуется в системах, где обратная связь по скорости заменяется обратной связью по ЭДС двигателя. В серии Simovert Masterdrives VC сигнал обратной связи по ЭДС двигателя wЭ поступает на сумматор å1 с выхода блока ЭФМ математической модели АД, а формирование частоты f1 выходного напряжения UZF осуществляется суммированием на å11 и å12 сигнала задания скорости wз и сигналов fsI и fsЭ с выхода блока IM математической модели двигателя по току и регулятора ЭДС двигателя (рис. 7.6 ). Все остальные блоки схемы управления электроприводом (на рис. 7.6 сгруппированы в блоке СУЭ) и функциональные связи между ними остаются при этом без изменения.
Качество регулирования скорости в подобных системах управления зависит от степени соответствия математической модели ЭФМ и установленных в ней параметров реальной электрической машине и, как правило, заметно уступает системам с датчиками скорости.
7.3.2. Система управления моментом АД
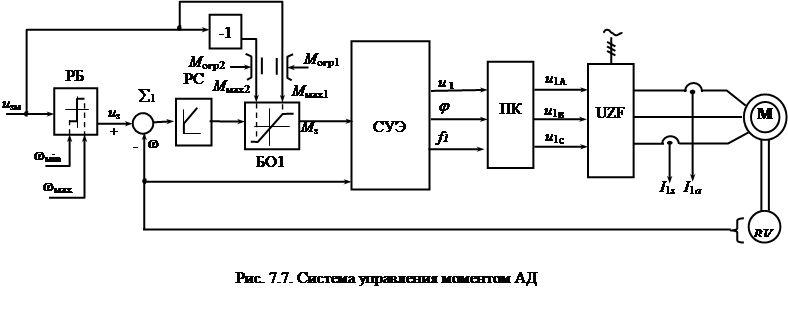
Ряд технологических объектов (натяжные, намоточно-размоточные механизмы и т.п.) требуют регулирования и стабилизации момента на валу двигателя при постоянстве его заданной скорости. В электроприводах серии Simovert Masterdrives VC решение подобной задачи реализуется в структуре управления с датчиком скорости на валу АД за счет включения между сигналом управления скоростью uз и сигналом управления моментом uзм блока РБ с релейной характеристикой (рис.7.7). Остальные блоки и их функциональные связи остаются в структуре управления электроприводом СУЭ неизменными.
Задание постоянной максимальной или минимальной скорости АД обеспечивается внешними сигналами wmax и wmin , ограничивающими уровень сигнала uз на входе регулятора скорости. Сигнал uзм определяет направление скорости и ограничение сигнала задания момента М*зå на уровне Мmax.1 и Мmax.2 . Предельно допустимые моменты АД ограничиваются при этом сигналами Могр.1 и Могр.2 .
Механическая характеристика электропривода в подобной системе при Мс < Мmax имеет абсолютную статическую жесткость при скорости, соответствующей заданию сигналами wmax или wmin . При Мс = Мmax механическая характеристика имеет абсолютно мягкий характер, стабилизируя заданный сигналом uзм электромагнитный момент АД.
 |
|


|
| I1у | |||||||||||||||

|
 
|
 |
 |
– Конец работы –
Эта тема принадлежит разделу:
СИСТЕМЫ ВЕКТОРНОГО ЧАСТОТНО-ТОКОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ
На сайте allrefs.net читайте: "СИСТЕМЫ ВЕКТОРНОГО ЧАСТОТНО-ТОКОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ"
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.055 сек.
Новости и инфо для студентов