Дифференциальные сельсины
Дифференциальные сельсины позволяют зафиксировать угол поворота вала, который является разностью углов поворота валов двух других сельсинов. В такой системе один сельсин является сельсин-приемником, а два других — сельсин-датчиками. Дифференциальный сельсин может быть соединен также с двумя другими сельсинами таким образом, что угол поворота его вала будет вычитаться из угла поворота вала одного из сельсин-датчиков. В этом случае разность углов поворота валов двух сельсинов фиксируется относительным углом поворота вала сельсин-приемника, а дифференциальный сельсин служит в качестве сельсин-датчика. Можно сельсины соединить таким способом, что из угла поворота вала дифференциального сельсина будет вычитаться угол поворота вала сельсин-датчика. Разность будет фиксироваться углом поворота вала сельсин-приемника. Как и в предыдущем случае, дифференциальный сельсин служит здесь в качестве сельсин-датчика.
Схематическое изображение дифференциального сельсина показано на рис. 13.12, а. Здесь, так же как в сельсин-датчике и сельсин-приемнике, имеются три обмотки статора Si, 52 и S3. Однако ротор в дифференциальном сельсине имеет не две обмотки, а три. Эти обмотки расположены в пазах ротора на равных расстояниях одна от другой. (На рисунке роторные обмотки обозначены символами R1, R2 и Rз.) В зависимости от схемы использования обмотки присоединяются к той или иной обмотке других сельсинов (рис. 13.12,6 — г). Хотя схема соединения одинакова для случаев использования дифференциального сельсина в качестве сельсин-датчика и сельсин-приемника, однако на практике при использовании дифференциального сельсина в качестве сельсин-приемника приходится вводить незначительные конструктивные изменения. Они сводятся к введению демпфирующего устройства для гашения возможных колебаний около правильного положения. Точно так же и обычный сельсин-приемник отличается от сельсин-датчика наличием в нем демпфирующего устройства.
Схема, показанная на рис. 13.12,6, применяется в случае, когда управление сельсин-приемником осуществляется от двух сельсинов — сельсин-датчика и дифференциального сельсина. Валы сельсин-датчика и дифференциального сельсина соединены с механизмами, вращение которых должно обеспечиваться валом сельсин-приемника. Таким образом, положение вала сельсин-приемника будет определяться изменением положения любого из валов — сельсин-датчика и дифференциального сельсина. При повороте этих двух валов вращение вала сельсин-датчика изменяет сигнал, подаваемый на дифференциальный сельсин. Это приводит к повороту вала дифференциального сельсина, вызывающего появление сигнала, который способствует установлению вала сельсин-приемника в синхронное положение. Угол поворота вала сельсин-приемника равен алгебраической разности между углами поворота сельсин-датчика и дифференциального сельсина, т. е. M=(G — D)°. Таким образом, когда дифференциальный сельсин действует как сельсин-датчик, эта операция является вычитанием. Когда дифференциальный сельсин является сельсин-приемником, можно использовать аналогичное уравнение. В этом случае угол поворота вала дифференциального сельсина, используемого в качестве сельсин-приемника, составит D=(G — М)°.
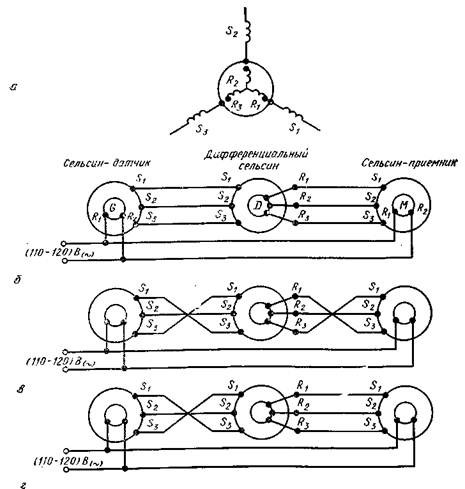
Рис. 13.12. Схематическое изображение дифференциального сельсина (а) и способы включения такого сельсина (б — г).
На рис. 13.12,0 дифференциальный сельсин подключен таким образом, что выполняется операция сложения. Здесь вал сельсин-приемника будет принимать положение, соответствующее равенству М — (G + Z))0.
На схеме рис. 13.12, г дифференциальный сельсин используется в качестве сельсин-приемника, поэтому угол поворота его вала равен сумме углов поворота двух сельсин-датчиков. Таким образом, угловой поворот вала сельсин-датчика, используемого в качестве сельсин-приемника, равен D=(G + M)°. В этом случае также имеет место процесс сложения, как и для схемы на рис. 13.12, в, только дифференциальный сельсин используется здесь в качестве сельсин-приемника, а не сельсин-датчика,