помехоустойчивости основных видов цифровой модуляции
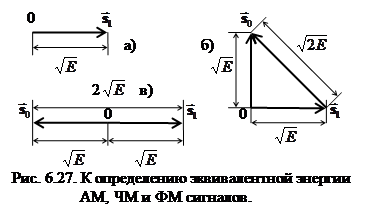
Для сравнения помехоустойчивости основных видов цифровой модуляции АМ, ЧМ (при использовании ортогональных сигналов) и ФМ достаточно для каждого из них определить эквивалентную энергию ЕЭ разностного сигнала sэ(t) = s1(t) – s0(t) или расстояние между этими сигналами и воспользоваться выражением (6.20). Сравнение удобно выполнять на энергетической основе, т.е. определять соотношение энергий сигналов с разными видами модуляции, при котором обеспечиваются равные вероятности ошибочного приема. На рис. 6.27. в двумерном пространстве показаны векторы сигналов s0(t), s1(t) с равными энергиями и sэ(t) для: а) АМ (при s0(t) = 0), б) ЧМ и в) ФМ.
Из этих рисунков и (6.20) следует:
 (6.21)
(6.21)
 (6.22)
(6.22)
 (6.23)
(6.23)
где  .
.
 Для достижения одинаковой помехоустойчивости (РАМ = РЧМ = РФМ) энергия сигналов Е при ЧМ должна быть в 2 раза, а при ФМ – в 4 раза меньше чем при АМ, т.е. по пиковой мощности ЧМ обеспечивает двукратный, а ФМ четырехкратный энергетический выигрыш по сравнению с АМ. По средней мощности выигрыши ЧМ и ФМ уменьшаются в 2 раза за счет пассивной паузы при АМ.
Для достижения одинаковой помехоустойчивости (РАМ = РЧМ = РФМ) энергия сигналов Е при ЧМ должна быть в 2 раза, а при ФМ – в 4 раза меньше чем при АМ, т.е. по пиковой мощности ЧМ обеспечивает двукратный, а ФМ четырехкратный энергетический выигрыш по сравнению с АМ. По средней мощности выигрыши ЧМ и ФМ уменьшаются в 2 раза за счет пассивной паузы при АМ.
Таким образом, при равных энергиях сигналов наибольшей помехоустойчивостью обладает система с ФМ (использующая противоположные сигналы), наименьшей – система с АМ (с пассивной паузой). Система с ЧМ, использующая ортогональные сигналы, занимает промежуточное положение.
Следует отметить, что оптимальный порог в демодуляторе при использовании АМ не равен нулю, как при ЧМ и ФМ (при использовании сигналов с равными энергиями). Он зависит от энергии Е (мощности) сигнала, которая может быть неизвестной или изменяться в процессе передачи, что затрудняет практическую реализацию оптимального приема.
Полученные результаты имеют общий характер и относятся не столько к конкретному виду модуляции при использовании гармонического переносчика, сколько к выбору сигналов. В частности, формулы расчета средней вероятности ошибочного приема применимы для любых двоичных систем:
(6.21) - с пассивной паузой,
(6.22) – с ортогональными сигналами,
(6.23) – с противоположными сигналами.
Практическая реализация оптимального приема сигналов с наиболее помехоустойчивой модуляцией – ФМ является весьма проблематичной из-за чрезмерных требований к точности работы системы синхронизации:
1. При использовании согласованной фильтрации требуется высокая временная точность взятия отсчета реакции на выходе СФ (погрешность не должна превышать малой доли периода несущей частоты).
2. При использовании активного фильтра (коррелятора) столь же высокие требования предъявляются к фазовой погрешности опорного колебания.
 Использование автономного опорного генератора в демодуляторе по этой причине исключается. Использование систем автоподстройки его частоты и фазы к соответствующим параметрам несущего колебания невозможно по причине отсутствия оного в спектре ФМ сигнала (при равновероятных сообщениях). Возможный выход из этой ситуации состоит в использовании различных схем восстановления несущего колебания из принимаемого сигнала, например, схемы Пистолькорса А.А., использующей последовательно включенные умножитель и делитель частоты в два раза (рис. 6.28). Однако, все схемы такого рода обладают существенным недостатком – неоднозначностью фазы (0 или π) восстановленного колебания несущей частоты, что может приводить к так называемой «обратной работе», когда принимаемые сообщения инвертируются, т.е. вместо 0 регистрируются 1 и наоборот.
Использование автономного опорного генератора в демодуляторе по этой причине исключается. Использование систем автоподстройки его частоты и фазы к соответствующим параметрам несущего колебания невозможно по причине отсутствия оного в спектре ФМ сигнала (при равновероятных сообщениях). Возможный выход из этой ситуации состоит в использовании различных схем восстановления несущего колебания из принимаемого сигнала, например, схемы Пистолькорса А.А., использующей последовательно включенные умножитель и делитель частоты в два раза (рис. 6.28). Однако, все схемы такого рода обладают существенным недостатком – неоднозначностью фазы (0 или π) восстановленного колебания несущей частоты, что может приводить к так называемой «обратной работе», когда принимаемые сообщения инвертируются, т.е. вместо 0 регистрируются 1 и наоборот.
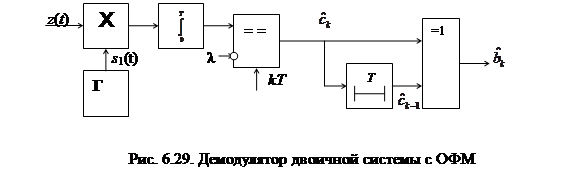
Эффективный способ решения этих проблем был предложен Н.Т.Петровичем путем перехода к относительной фазовой модуляции (ОФМ). При ОФМ сообщение («0» или «1») передается не абсолютным значением фазы несущего колебания (0 или π), а разностью фаз текущего и предшествующего сигналов, т.е. «0» передается сохранением фазы колебания, а «1» ее изменением на π. Систему с ОФМ можно рассматривать как систему с ФМ со специальным перекодированием кодовых символов bk в ck на входе фазового модулятора по правилу ck = bk Å ck-1. Символ Å означает суммирование по модулю 2 (логическую операцию «исключающее ИЛИ»). Принимать сигналы с ОФМ можно с помощью фазовых демодуляторов (рис. 6. 18) с последующим обратным перекодированием выходных символов (рис. 6.29). В этой схеме обратное перекодирование осуществляется логическим элементом «исключающее ИЛИ» (символ «=1» на УГО) совместно с элементом задержки на Т.
 Определим вероятность ошибочного приема в системе с ОФМ при когерентном приеме. Поскольку в формировании выходного символа
Определим вероятность ошибочного приема в системе с ОФМ при когерентном приеме. Поскольку в формировании выходного символа  участвуют символы
участвуют символы  и
и  , ошибочный прием имеет место при выполнении одного из двух условий:
, ошибочный прием имеет место при выполнении одного из двух условий:
1. символ принят верно, а символ ошибочно,
2. символ принят ошибочно, а символ верно.
Каждое из этих условий реализуется с вероятностью РФМ(1-РФМ). Таким образом получаем  . Поскольку требуется обеспечивать
. Поскольку требуется обеспечивать  , то
, то
 .
.
Таким образом, «платой» за переход от ФМ к ОФМ для устранения «обратной работы» является удвоение средней вероятности ошибочного приема.
 На рис. 6.30 приведены кривые помехоустойчивости когерентного приема в двоичных системах, рассчитанные по выше полученным формулам.
На рис. 6.30 приведены кривые помехоустойчивости когерентного приема в двоичных системах, рассчитанные по выше полученным формулам.