HTM моделирует мир путем построения представлений причин, включая предустановленное моторное поведение
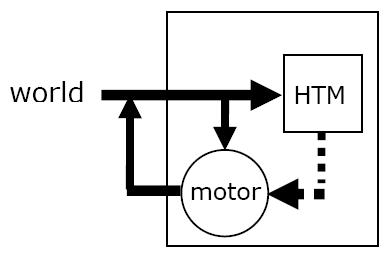
По мере того, как HTM открывает причины в ее мире, она обучается представлять ее предустановленное поведение точно также, как и поведение объектов внешнего мира. С точки зрения HTM, система, к которой она подключена, всего лишь еще одним объектом мира. HTM формирует представление о поведении системы, к которой она подключена, и, что важно, она учится предсказывать ее поведение. Затем, с помощью механизма ассоциативной памяти представление встроенного поведения в HTM связывается с механизмом, создающим встроенное движение (рисунок 2b). После такого ассоциативного связывания, когда HTM задействует внутреннее представление движения, она может вызвать возникновение движения. Если HTM предсказывает, что движение возникнет, она может сделать так, что движение произойдет заранее. Теперь HTM находится в положении управления движением. Связывая вместе последовательности этих простых движений, она может создавать новое сложное целенаправленное поведение. Чтобы сделать это, HTM выполняет те же самые шаги, что она выполняла, когда генерировала связку предсказаний и воображалу будущее. Однако, теперь, вместо простого воображения будущего, HTM связывает встроенные движения, делая их действительно происходящими.