Графічний розв’язок систем т лінійних нерівностей з двома змінними
Дано систему т лінійних нерівностей з двома змінними
 (3.1)
(3.1)
Знак деяких або всіх нерівностей може бути „ ”.
”.
Розглянемо першу нерівність системи (3.1) у системі координат  . Побудуємо пряму
. Побудуємо пряму  , яка є граничною прямою. Ця пряма ділить площину на дві півплощини (1) і (2).
, яка є граничною прямою. Ця пряма ділить площину на дві півплощини (1) і (2).

Напівплощина (1) вміщує початок координат. Для визначення, з якого боку від граничної прямої розміщена задана напівплощина необхідно взяти довільну точку на площині (краще початок координат) і підставити координати цієї точки у нерівність. Якщо нерівність справедлива, то напівплощина звернена у бік цієї точки, якщо не справедлива – то у протилежний бік від точки. Напрямок напівплощини на малюнку позначається стрілкою.
Розв’язком кожної нерівності системи є напівплощина, яка вміщує граничну пряму і розміщена по одну сторону від неї.
Перетином напівплощин, кожна з яких визначається відповідною нерівністю системи, називається областю розв’язків системи (ОР).
Область розв’язків системи, яка задовольняє умовам невід’ємності ( ), називається областю невід’ємних або припустимих розв’язків (ОПР).
), називається областю невід’ємних або припустимих розв’язків (ОПР).
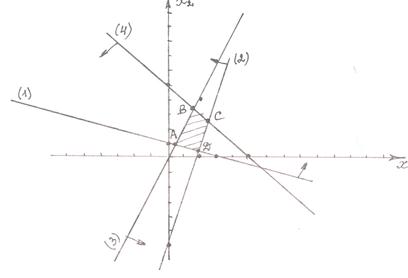
Приклад.Знайти ОР і ОПР системи нерівностей і визначити координати кутових точок ОПР.

Знайдемо ОР системи. Для цього побудуємо граничну пряму  і підставимо координати точки
і підставимо координати точки  у нерівність (1):
у нерівність (1):  Координати точки не задовольняють нерівності (1), тому розв’язком цієї нерівності є напівплощина, що не вміщує точки .
Координати точки не задовольняють нерівності (1), тому розв’язком цієї нерівності є напівплощина, що не вміщує точки .
(1)  При
При  При
При 
(2)  При
При  При
При 
(3)  При
При  При
При 
(4)  При
При  При
При 
Областю розв’язків і областю припустимих розв’язків є чотирьохкутник . Знайдемо кутові точки чотирьохкутника.
. Знайдемо кутові точки чотирьохкутника.


 .
.
 ;
;
 .
.

 .
.


 .
.