ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное
учреждение высшего профессионального образования
«Тульский государственный университет»
Кафедра автоматики и телемеханики
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Отчет по лабораторной работе
СИНТЕЗ УПРАВЛЯЮЩИХ СИСТЕМ НА ОСНОВЕ НЕЧЕТКОЙ ЛОГИКИ
Выполнил: студент гр.240181/09 Пасюк И. Р.Цель работы
Изучение основных понятий теории нечетких множеств и их приложений. Знакомство с пакетом математических приложений MATLAB.
Ход работы
Рисунок 1 – Схема исследуемой системы Для входных переменных регулятора рекомендуются симметричные диапазоны изменения, при этомАпериодический процесс
Рисунок 3 – Совмещённый график выходных сигналов системы с fuzzy-регулятором и PID-регулятором По рисунку определяем перерегулирование (σ) и время переходного процесса(τ).Процесс с минимальным временем регулирования
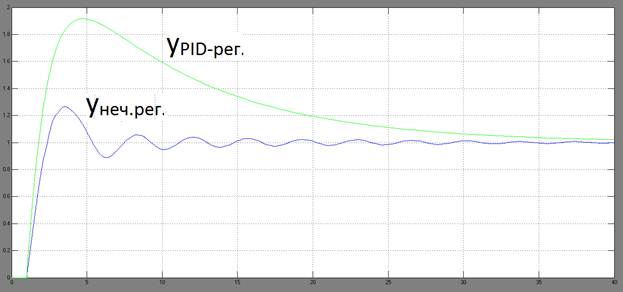 Рисунок 5 – Совмещённый график выходных сигналов системы с fuzzy-регулятором и PID-регулятором
Рисунок 5 – Совмещённый график выходных сигналов системы с fuzzy-регулятором и PID-регулятором
По рисунку определяем перерегулирование (σ) и время переходного процесса(τ).
σнеч.рег.=16% τперех.процесса=10.5 с
σPID-рег.=92% τперех.процесса=32 с
Заключение
В ходе проделанной работы была исследована система с нечетким регулятором. Выходной сигнал данной системы сравнивался с выходным сигналом системы, в которую был включен ПИД-регулятор. Стоит отметить, что в системе с нечетким регулятором перерегулирование и время переходного процесса были сравнительно меньше, чем в системах с ПИД-регулятором.