ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Нелинейной считается система, содержащая хотя бы одно нелинейное звено, то есть звено, описываемое нелинейным уравнением. Все реальные САУ в той или иной степени нелинейны, но часто существует возможность свести задачу к исследованию линейной модели реальной системы путем линеаризации последней. Процесс линеаризации невозможен в том случае, когда в системе присутствуют звенья с существенно нелинейными характеристиками.
Все реальные объекты и системы нелинейны.
Линейной называется такая САУ, которая описывается линейными дифференциальными уравнениями.

Е1 R2 E2
R1
I= ; I=
; I= *U;
*U;  +
+ - принцип суперпозиции в случае линейности.
- принцип суперпозиции в случае линейности.
Нелинейные объекты и системы – это те, у которых хотя бы один элемент нелинеен.
 P=
P= =
= Kоб=(
Kоб=( ) при I=I10
) при I=I10
Пример линеаризуемой (слабой) нелинейности.
Такая нелинейность присуща всем реальным объектам.
При К=Кmin определяют точность, при К=Kmax определяют устойчивость.
Но существуют такие нелинейности, которые нельзя линеаризовать (существенные).
Примеры:
1. Релейные элементы
u=sign εumax ,т.е.
|
 0
0
u=-umax , при ε  0
0
|
 с симметр. хар-кой
с симметр. хар-кой 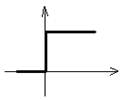 с несимметр. хар-кой
с несимметр. хар-кой
2. Люфт:

3. Гистерезис (неоднозначные нелинейные звенья):
 u=umax при ε≥b, если ε≥0
u=umax при ε≥b, если ε≥0
 u=-umax при ε
u=-umax при ε b, если ε0
b, если ε0
4. Релейный элемент с зоной нечувствительности:
u=umax при ε≥b
u=0 при -b ε b
b
u=-umax при ε-b
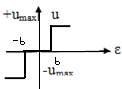
Статические характеристики и математическое описание релейных элементов

Рис. 1. Статические характеристики релейных элементов
а – идеальное реле;
б –реле с зоной нечувствительности;
в –реле с гистерезисом.
Выходной управляющий сигнал принимает следующие значения:
 –для идеального реле
–для идеального реле
| |
 –для реле с зоной нечувствительности
–для реле с зоной нечувствительности
 –для реле с гистерезисом
–для реле с гистерезисом
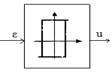
Нелинейные системы подразделяются на два класса. К нелинейным системам первого класса относят такие, которые с помощью структурных преобразований можно привести к виду (рис.2):
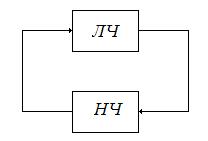
Рис.2. Нелинейные системы I класса
Системы, где подобное преобразование невозможно относят ко второму классу (рис.3). Они требуют использования более сложных с математической точки зрения методов исследования.

Рис.3. Нелинейные системы II класса