рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Реферат Курсовая Конспект
ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ - раздел Менеджмент, Особе...
ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Все реальные объекты и системы нелинейны. Линейной называется такая САУ, которая описывается линейными дифференциальными…Методы исследования устойчивости нелинейных САУ
Устойчивость и качество переходных процессов зависят от величины и вида внешнего воздействия
Рис.4. Переходные процессы в линейной системе Колебательность и длительность переходного процесса не изменяются.В области параметров можно выделить подобласти с многочастотными и одночастотными колебаниями.
Рис.8. Автоколебания с различной амплитудой.ТОЧНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
Метод фазового пространства. Виды фазовых траекторий.
У = х1 = х2 .Методика исследования нелинейных систем второго порядка методом фазовой плоскости. Примеры исследования.
Методика исследования нелинейных систем методом фазовой плоскости включает в себя следующие этапы:
1. Переход от исходного дифференциального уравнения второго порядка(1), описывающего динамику системы к системе двух дифференциальных уравнений первого порядка в форме Коши(2). Выделение фазовых переменных x и y, где x – отклонение выходной величины от установившегося режима (x1=x), y – скорость изменения выходной величины (x2=y).
 (1)
(1)
 (2)
(2)
2. Исключение времени, путем деления второго уравнения системы на первое(3).
 (3)
(3)
3. Нахождение уравнений линий переключения управляющего воздействия и выделение областей, где нелинейную систему можно рассматривать как линейную. Решение дифференциальных уравнений для каждой выделенной области.
4. Построение фазовых траекторий в соответствующих областях.
5. Анализ устойчивости и качества нелинейной системы.
Рассмотрим пример исследования методом фазовой плоскости релейной системы автоматического управления углом поворота вала двигателя. Структурная схема системы представлена на рис.15.
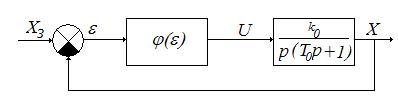
Рис.15. Структурная схема релейной системы
Здесь  – кусочно-линейная статическая характеристика нелинейного элемента,
– кусочно-линейная статическая характеристика нелинейного элемента,  – коэффициент усиления и постоянная времени двигателя, Х – угол поворота вала исполнительного двигателя, Хз – подлежащее отработке заданное значение Х.
– коэффициент усиления и постоянная времени двигателя, Х – угол поворота вала исполнительного двигателя, Хз – подлежащее отработке заданное значение Х.
1. Рассмотрим случай, когда  - идеальное реле (рис.16а).
- идеальное реле (рис.16а).
Представленная на рис.15 схема, описывается следующей системой уравнений:
 (4)
(4)
Исключив промежуточные переменные, получим одно уравнение: 
или
 (5)
(5)
Возьмем частный случай  , тогда исходя из этого
, тогда исходя из этого  . Получим систему двух дифференциальных уравнений первого порядка:
. Получим систему двух дифференциальных уравнений первого порядка:
 (6)
(6)
Для  система (6) не изменится, если рассматривать X как координату отклонения от заданного значения.
система (6) не изменится, если рассматривать X как координату отклонения от заданного значения.
Для получения уравнения фазовых траекторий разделим одно уравнение на другое. Исключим время, разделив второе уравнение на первое:
 (7)
(7)
Согласно статической характеристике идеального реле  может принимать только постоянные значения
может принимать только постоянные значения  . Для каждого из этих значений
. Для каждого из этих значений  уравнение (7) является линейным и легко решается:
уравнение (7) является линейным и легко решается:
Его решение имеет вид:
 , при
, при  (8)
(8)
 ,при
,при  (9)
(9)
где постоянная интегрирования  ,
,  – начальные значения фазовых переменных. На рис.16 представлены графики фазовой траектории и изменения управляющего воздействия для этого случая. Линия переключения реле совпадает с осью координат и ее уравнение имеют вид x=0 (
– начальные значения фазовых переменных. На рис.16 представлены графики фазовой траектории и изменения управляющего воздействия для этого случая. Линия переключения реле совпадает с осью координат и ее уравнение имеют вид x=0 ( ).
).
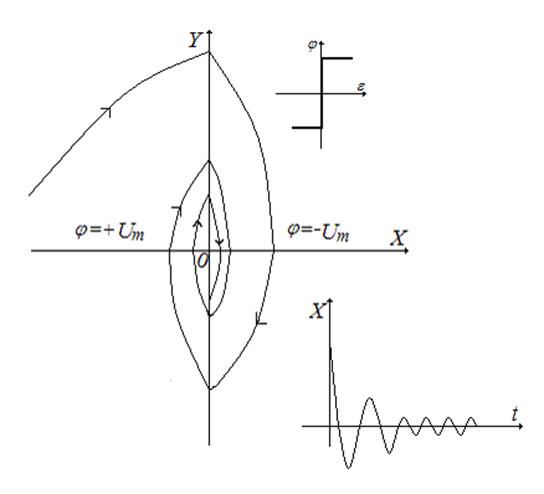
Рис.16. Вид фазовой траектории для системы с идеальным реле.
Анализируя вид фазовой траектории можно сделать вывод о том, что система не имеет установившегося значения. Имеет место режим автоколебаний. Задающее и возмущающее воздействия отрабатываются с максимальным быстродействием, так как управляющее воздействие принимает максимальные значения .
Рассмотрим случай, когда –
реле с зоной нечувствительности (рис.1с).
В данном случае  кроме постоянных значений может принимать значение равное 0. При
кроме постоянных значений может принимать значение равное 0. При  уравнения (7) принимает вид прямой (движение объекта по инерции, так как
уравнения (7) принимает вид прямой (движение объекта по инерции, так как  ):
):
 ,
,
его решение
 (10)
(10)
При  ,
,  ,
,
следовательно уравнение линии переключения для этого случая представляет собой следующую зависимость:
 при
при 
 (11)
(11)
На рис.17 представлен вид фазовой траектории. Отрезок оси абсцисс между линиями переключения представляет собой особый отрезок, определяющий зону движения системы по инерции из-за нечувствительности реле.
Если ширина зоны нечувствительности реле достаточно большая, то система (объект) может “застрять” в этой зоне, как показано на рис.17.
Если уменьшить зону нечувствительности реле, например, с целью уменьшения установившейся ошибки, то система перейдет в режим автоколебаний, так как они будут “проскакивать” зону нечувствительности.
Система с таким фазовым портретом устойчива в целом, но неасимптотически из-за наличия зоны нечувствительности реле. Она имеет установившуюся ошибку, максимальное значение которой, определяется зоной нечувствительности реле.
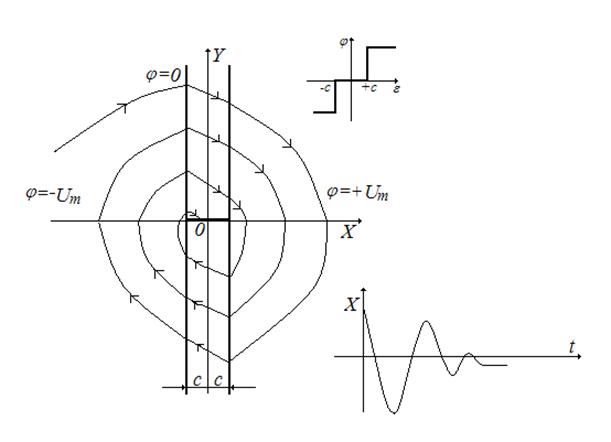
Рис.17. Вид фазовой траектории для системы, имеющей
реле с зоной нечувствительности.
Для реле с гистерезисом (рис.1в)
уравнение линий переключения будет
 (12)
(12)
Фазовый портрет такой системы представлен на рис.18. Здесь присутствует устойчивый предельный цикл, что говорит о неустойчивости системы в малом.
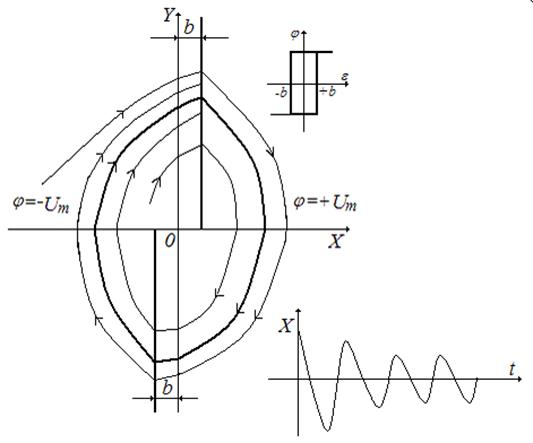
Рис.18. Вид фазовой траектории для системы, имеющей
реле с гистерезисом
Понятие о скользящем режиме. Способ его получения.
Рис. 19. Структурная схема исследуемой системыМетод исследования устойчивости А.М. Ляпунова.
Второй метод Ляпунова, называемый также прямым методом, дает достаточные условия устойчивости, то есть определяет часть области устойчивости. Идея… Рассмотрим в фазовом пространстве замкнутую поверхность произвольной формы,… (17)Критерий абсолютной устойчивости В.М. Попова
Рис.23. Условие сектораСвязь между критерием устойчивости Попова с критерием устойчивости Найквиста
ПРИБЛИЖЕННЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
НЕЛИНЕЙНЫХ СИСТЕМ
Идея метода гармонической линеаризации
Рассмотрим нелинейную систему, структурная схема которой представлена на рис. 29. Рис.29. Нелинейная система I родаМетодика исследования автоколебаний с помощью
Гармонической линеаризации
Будем считать, что автоколебания описываются зависимостью вида (19) , без постоянной составляющей. Применив гармоническую линеаризацию, заменим… (27) В результате получим линейную САУ с передаточной функцией– Конец работы –
Используемые теги: особенности, нели, ных, систем, автоматического, управления0.093
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.16 сек.
Новости и инфо для студентов