Идея метода гармонической линеаризации
Важную информацию о существовании периодических режимов в нелинейных системах, их числе и параметрах может дать приближенный метод гармонической линеаризации. Достоинство частотного метода гармонической линеаризации заключается в его наглядности и в возможности получения зависимости показателей качества процессов от вида и параметров нелинейности, структуры и параметров линейной системы. Отсутствуют ограничения, накладываемые на порядок дифференциальных уравнений, описывающих динамику системы.
Рассмотрим нелинейную систему, структурная схема которой представлена на рис. 29.

Рис.29. Нелинейная система I рода
Система состоит из линейной части с передаточной функцией  и нелинейного элемента с характеристикой
и нелинейного элемента с характеристикой  . Входная величина X нелинейного элемента и выходная Y являются периодическими функциями времени. Метод гармонической линеаризации основан на предположении, что колебания на входе нелинейного элемента являются синусоидальными, то есть
. Входная величина X нелинейного элемента и выходная Y являются периодическими функциями времени. Метод гармонической линеаризации основан на предположении, что колебания на входе нелинейного элемента являются синусоидальными, то есть
 , (19)
, (19)
где А – амплитуда,  - частота этих колебаний (рис.30).
- частота этих колебаний (рис.30).

Рис.30. Прохождение гармонического колебания
через нелинейное звено
В действительности автоколебания в нелинейных системах всегда несинусоидальны вследствие искажения их формы нелинейным элементом. Поэтому указанное выше предположение означает, что метод гармонической линеаризации является приближенным и область его применения ограниченна.
Достоверность результатов исследования этим методом напрямую зависит от следующего условия:
Линейная часть системы должна являться фильтром низких частот. АЧХ линейной части системы в этом случае имеет вид, как на рис.31.

Рис.31. Вид АЧХ линейной части системы
Наибольшую амплитуду будет иметь первая гармоника. Чем выше частота автоколебаний, тем в меньшей степени линейная часть системы вследствие своей инерционности реагирует на высокочастотный сигнал. В силу этого обстоятельства высокочастотными составляющими сигнала на выходе линейной части можно пренебречь.
Если разложить выходные колебания Y(t) в ряд Фурье и отбросить высшие гармоники, получим следующее выражение:
 + высшие гармоники (20)
+ высшие гармоники (20)
Здесь
 , (21)
, (21)
где
 (22)
(22)
Продифференцировав это равенство, получаем:
 (23)
(23)
Подставив выражения (22) и (23) в выражение (20) получим следующее:
 (24)
(24)
Соответственно,
 (25)
(25)
Коэффициенты  и
и  называются коэффициентами гармонической линеаризации. Они определяются видом нелинейности
называются коэффициентами гармонической линеаризации. Они определяются видом нелинейности  и значениями А и
и значениями А и  . Постоянная составляющая
. Постоянная составляющая  присутствует в уравнении (24) только для нелинейностей несимметричных относительно начала координат. Коэффициент равен нулю только в случае однозначных статических характеристик нелинейных элементов. Неоднозначность характеристик приводит к тому, что при изменении знака входного сигнала происходит запаздывание в изменении выходного сигнала в связи с переходом на другую ветвь характеристики . В результате при гармоническом входном воздействии возникает запаздывание по фазе первой гармоники на выходе относительно входного сигнала. Поэтому в данном случае коэффициент
присутствует в уравнении (24) только для нелинейностей несимметричных относительно начала координат. Коэффициент равен нулю только в случае однозначных статических характеристик нелинейных элементов. Неоднозначность характеристик приводит к тому, что при изменении знака входного сигнала происходит запаздывание в изменении выходного сигнала в связи с переходом на другую ветвь характеристики . В результате при гармоническом входном воздействии возникает запаздывание по фазе первой гармоники на выходе относительно входного сигнала. Поэтому в данном случае коэффициент  при косинусоидальной составляющей не равен нулю и отрицателен. Соответственно отрицательным будет и коэффициент
при косинусоидальной составляющей не равен нулю и отрицателен. Соответственно отрицательным будет и коэффициент  .
.
Таким образом, передаточная функция нелинейной части системы может быть описана следующей зависимостью:
 . (26)
. (26)
Рассмотрим пример вычисления коэффициентов гармонической линеаризации для идеального реле.
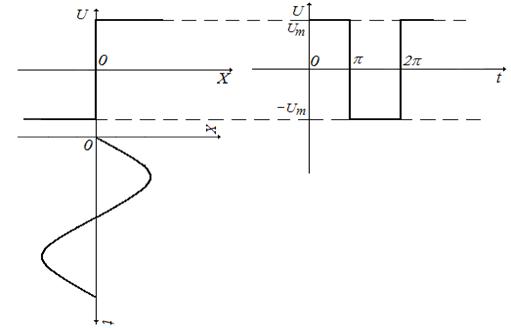
Рис.32. Прохождение гармонического сигнала через идеальное реле
Для того, что найти коэффициенты  и
и  необходимо вычислить значения
необходимо вычислить значения  и :
и :
 ;
;
 , здесь
, здесь 


Видно, что коэффициент гармонической линеаризации зависит от величины  - амплитуды гармонических автоколебаний входного сигнала. В этом проявляется нелинейность свойств данного звена.
- амплитуды гармонических автоколебаний входного сигнала. В этом проявляется нелинейность свойств данного звена.
Коэффициенты гармонической линеаризации для других типовых нелинейных звеньев вычисляются аналогично. Для решения задач можно воспользоваться готовыми справочными данными.