рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Схемы и принцип работы корректирующих и вспомогательных устройств
Реферат Курсовая Конспект
Схемы и принцип работы корректирующих и вспомогательных устройств
Схемы и принцип работы корректирующих и вспомогательных устройств - раздел Философия, Модуль I. Тема 1.1. Понятие об автоматике, роль автоматики в автоматизации технологических процессов на производстве Корректирующие Устройства Предназначены Для Улучшения Динамических Свойств Си...
Корректирующие устройства предназначены для улучшения динамических свойств систем автоматики (точности и быстродействия) а также придания определенного знака изменяющимся во времени электрического сигнала.
В качестве корректирующего устройства в современных системах автоматики широко используются RC цепи и операционные усилители с использованием RC цепей в качестве обратной связи.
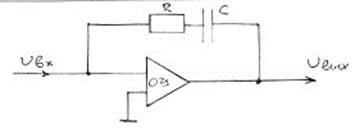
Данная схема представляет собой пропорционально интегральный регулятор (ПИ – регулятор). В выходном сигнале в такого корректирующего устройства содержатся 2 составляющие.
1) пропорциональная составляющая U
Uвых=K*Uвых
и интеграл по времени Uвх
Задающее устройство предназначены для выработки эталонного параметра – задающего воздействия как правила виде U регулируемой величины.
В качестве задающего устройства в системах автоматики применяются стабилизаторные источники питания постоянного и переменного напряжения с регулируемым выходом.
В качестве элемента установки уровня сигнала используются переменный резистор со шкалой проградуированной единицами измерения технологического параметра.
Вспомогательные устройства служат для согласования уровней сигнала между различными.
В качестве вспомогательного устройства используются ограничители и фиксаторы уровней, мультипликаторы и демультипликаторы, шифраторы и дешифраторы.
Примером вспомогательного устройства является схема ограничителя уровня сигнала
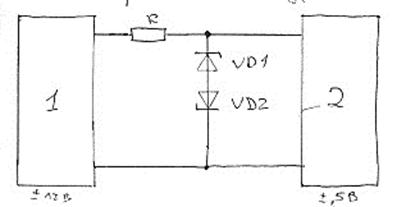
Предположим, в блоке 1 используются сигналы, с максимальным уровнем ±12 В. Блок 2 построен на элементе исполнительного максимального сигнала ±5 В. Пока с выхода блока 1 на вход блока 2 подается напряжение не более ±5 В стабилитроны VD1 и VD2 заперты и не оказывают воздействия на работу схемы.
Если U на выходе блока 1 увеличивается до уровня 9 В, то один из стабилитронов пробивается и ограничивает U до уровня 5 В (U пробоя стабилитронов = 5 В)
Модуль III. «Системы автоматики»
Тема 3.1. «Система автоматического контроля (САК)».
– Конец работы –
Эта тема принадлежит разделу:
Модуль I. Тема 1.1. Понятие об автоматике, роль автоматики в автоматизации технологических процессов на производстве
Введение... Тема Понятие об автоматике роль автоматики в автоматизации технологических процессов на производстве...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Схемы и принцип работы корректирующих и вспомогательных устройств
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.016 сек.
Новости и инфо для студентов