рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Модуль I. Тема 1.1. Понятие об автоматике, роль автоматики в автоматизации технологических процессов на производстве
Реферат Курсовая Конспект
Модуль I. Тема 1.1. Понятие об автоматике, роль автоматики в автоматизации технологических процессов на производстве
Модуль I. Тема 1.1. Понятие об автоматике, роль автоматики в автоматизации технологических процессов на производстве - раздел Философия, Модуль I. Введение. ...
Модуль I.
Введение.
Тема 1.1. «Понятие об автоматике, роль автоматики в автоматизации технологических процессов на производстве».
Автоматика – отрасль науки и техники, которая изучает методы и технические средства, позволяющие осуществлять технологические процессы (т.п.) производства без непосредственного участия человека.
Примеры технологических процессов выплавки стали: выплавка стали, добыча полезных ископаемых, изготовление кастрюль, чайников и т.д.
Применение автоматики:
1) повышает производительность труда, скорость и точность выполнения операций и т.п.
2) освобождает человека от тяжелой физической, а также утомительной однообразной работы
3) исключает необходимость нахождения человека в условиях вредных для здоровья или опасных для жизни
4) повышает удобство использования технологического оборудования и культуру производства
5) обеспечивает многофункциональность оборудования и оперативность заданных механических параметров.
Автоматика является базой для широкой автоматизации производства и быта человека.
Автоматизация – это комплекс мероприятий, направленный на освобождение человека от непосредственного участия в процессе получения, преобразования, передачи и использования энергии, материалов и информации за счет передачи этих функций машинам или механизмам.
В условиях автоматизации устройства и быта за человеком остаются следующие функции:
1) задание необходимых параметров технологического процесса (температура, скорость, перемещение или вращение, время, освещенность, давление и т.д.)
2) наблюдение за ходом технологического процесса и качества выпускаемой продукции
3) первоначальный пуск и наладка технологического процесса, оборудования
4) контроль за работой машин и механизмов
Автоматизация осуществляется за счет использования устройств автоматики и микропроцессорной техники, объединяемых в автоматизированные системы:
1) автоматизированная система управления технологическим процессом (АСУТП)
2) автоматизированная система управления предприятием (АСУП)
3) автоматизированная система диспетчеризации (АСД)
4) автоматизированная система проектирования (АСП)
В дальнейшем мы будем рассматривать частный случай АСУТП – системы автоматики.
Система автоматики – это совокупность устройств, обеспечивающих выполнение заданных операций Т.П. с определенными параметрами (на заданном уровне), а также контроль за этими параметрами.
Примером системы автоматики является система автоматического регулирования (САР) система автоматического регулирования температуры.
Для того, чтобы изучить принцип работы систем автоматики, необходимо знать принцип работы устройств, входящих в эти системы. Эти устройства называются элементами автоматики.
Примеры автоматических устройств:
Автоматическая система проверки шахт и рудников, автоматическая покраска машин, выпечка хлеба (температура в печи).
Элементами системы автоматизации называется составная часть этой системы, выполняющая определенную функцию и взаимодействующая с др. частями системы.
Тема 1.2. «Общие сведения о системах автоматизации. Виды систем автоматики. Понятие о структурной схеме систем автоматики. Классификация систем автоматики и структурные схемы».
Все системы автоматики в зависимости от выполняемых функций делятся на:
· системы автоматического контроля (САК)
· системы автоматического управления (САУ)
· системы автоматического регулирования (САР)
Структурные схемы систем автоматики наглядно показывают количество и состав входящих в систему элементов взаимодействия этих элементов между собой и объектов автоматизации, а также позволяют рассмотреть принцип работы данной системы.
Для этого на структурных схемах кроме основных узлов и блоков показываем линии связи между ними, а также направление распространения сигнала по линиям связи с помощью стрелок.
Для примера рассмотрим структурную схему автоматического регулирования (САР).

Как видно из структурной схемы в системах автоматики сравниваются два параметра:
1. эталонный (желаемый)
2. действительный (контролируемый или регулируемый)
Эталонным параметром называется величина, определяющая необходимый характер технологического процесса.
Действительным параметромназывается величина, реально действующая в данный момент времени на объекте автоматизации.
В системах автоматики существуют следующие виды воздействий:
1) задающие воздействие – определяет величину эталонного параметра для выполнения технологического процесса с высоким качеством.
Существуют два вида задающих воздействий:
· для поддержания технологического параметра на определенном уровне
· для изменения технологического параметра по определенному закону во времени
2) возмущающее воздействие – нарушает нежелаемый ход технологического процесса и изменяет один или несколько параметров этого процесса.
3) регулирующее воздействие – компенсирует (исправляет) вредное влияние возмущенного воздействия и приводит параметры технологического процесса к желаемым по значению в соответствии с задающим воздействием.
4) управляющее воздействие – изменяем ход ТП в соответствии с задающим воздействием.
Модуль II. «Элементы автоматики»
Тема 2.1. «Классификация элементов (устройств) автоматики».
Все элементы по функциональному назначению делятся на:
1)
|
|
2) – преобразовательно-усилительное устройство – предназначено для усиления или преобразования сигнала до величины или формы, необходимой для нормальной работы исполнительного устройства (электронные или электромагнитные усилители, цифро-аналоговые и аналогово-цифровые преобразователи, неуправляемые и управляемые выпрямители и инверторы, электромагнитные реле и контакторы)
3)
|
4)
|
|
5)
|
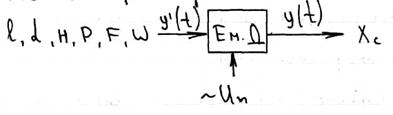
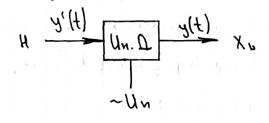
6)  – датчик – воспринимает изменение величины технологического параметра
– датчик – воспринимает изменение величины технологического параметра  и непрерывно преобразует его в электрический сигнал (термопара, тахометр, фоторезистор, емкостной датчик уровня жидкости, потенциометрический датчик угла поворота)
и непрерывно преобразует его в электрический сигнал (термопара, тахометр, фоторезистор, емкостной датчик уровня жидкости, потенциометрический датчик угла поворота)
7)
|
 и действительным значением технологического параметра (измерительные мосты, потенциометры, электромеханические и механические устройства)
и действительным значением технологического параметра (измерительные мосты, потенциометры, электромеханические и механические устройства)
8) – корректирующее устройство предназначено для улучшения динамических свойств системы автоматики – точности и быстродействия (корректирующие  -цепи, устройство на операционных системах с применением -цепей)
-цепи, устройство на операционных системах с применением -цепей)
9)
|
Тема 2.2. «Датчики. Общие сведения о датчиках, классификация датчиков. Требования, предъявляемые к датчикам».
Датчиком называется устройство автоматики, которое воспринимает изменение величины технологического параметра и непрерывно преобразует его в электрический сигнал
По принципу преобразования технологического параметра датчики делятся на:
1. параметрические – преобразуют изменения технологического параметра в измерение параметра электрической цепи (активное индуктивное и емкостное сопротивление)
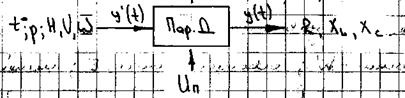
Поскольку на выходе датчика необходимо иметь сигнал в виде напряжения или ЭДС, то совместно с параметрическими датчиками используются дополнительные внешние источники питания постоянного и переменного тока.
2. генераторные – непосредственно преобразуют изменение технологического параметра и изменение ЭДС напряжения или силы тока (постоянного или переменного), а также последовательность импульсов различной частоты

Генераторные датчики не требую дополнительных источников питания, т.к. сами вырабатывают электроэнергию.
По виду преобразуемого технологического параметра (входной величины) все датчики делятся на датчики: скорости вращения ω; температуры to; давления – Р; высоты – Н; усилий –F; влажности –W; освещенности – Е; линейного перемещения –L; углового перемещения –a; времени –t; уровня жидкости – Н.
По виду выходной величины все датчики делятся на:
· активного сопротивления R;
· индуктивного сопротивления XL;
· емкостного сопротивления XC;
· величины постоянного тока, напряжения и ЭДС;
· величины (амплитуды) переменного тока, напряжения или ЭДС;
· частоты или фазы переменного тока, напряжения или ЭДС;
· частоты последовательности импульсов;
Вывод: таким образом, изменение входной величины датчика (любого) вызывает пропорциональное изменение выходной величины датчика.
Требования, предъявляемые к датчикам:
· определенность и однозначность зависимости между входной и выходной величинами;
· высокая чувствительность к изменениям к входной величине;
· высокое быстродействие;
· минимальное обратное воздействие на входную величину или полное его отсутствие;
· высокая перегрузочная способность;
· устойчивость к воздействиям посторонних факторов и долговечность;
· стабильность параметров и характеристик во времени и при изменении внешних условий;
· простота устройства, малые размеры и масса;
· взаимозаменяемость, удобство монтажа и обслуживания
Тема 2.3.«Конструкция и принцип работы параметрических датчиков.
Контактные датчики»
Контактные датчики преобразуют линейное  или угловое
или угловое  перемещение, а также
перемещение, а также  , давление
, давление  , уровень жидкости
, уровень жидкости  в электрический сигнал (замкнуто-разомкнуто).
в электрический сигнал (замкнуто-разомкнуто).
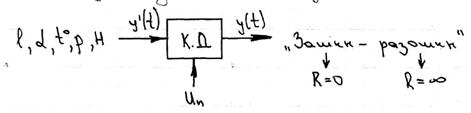
Таким образом, выходные сигналы таких датчиков являются два значения активного сопротивления.
Контактный датчик температуры
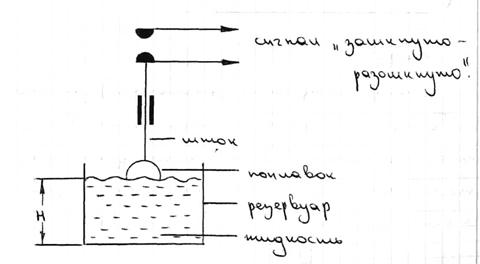
На таком же принципе могут быть построены датчики уровня эл. проводящей жидкости (морской воды).

Контактный датчик уровня не эл. проводящей жидкости
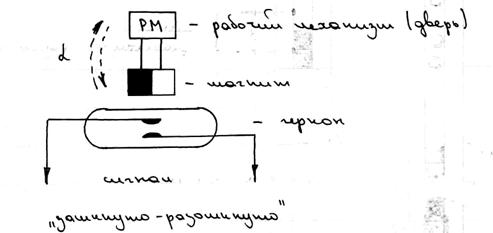
Контактный датчик углового перемещения
Контактный датчик линейного перемещения

Потенциометрические (реостатные) датчики
Конструкция и схема включения емкостных датчиков.
(Самостоятельная работа. Поспелов, стр. 31)
Емкостные датчики представляют собой конденсаторы разных конструкций и форм и служат для преобразования механических линейных или угловых перемещений, а также давление, влажности или уровня среды в измерении емкости. Емкостные датчики работают только при частотах, превышающих 1000 Гц. Использование их при промышленной частоте практически невозможно из-за очень большого емкостного сопротивления.
Достоинствами емкостных датчиков является простота устройства, малые основные размеры и масса, высокая чувствительность и малая инерционность.
Недостатки: необходимость источника высокой частоты или усиление при промышленной частоте и вредное влияние паразитных емкостей.
Схема включения емкостного датчика

Кроме углового и нелинейного перемещений угловые датчики могут преобразовывать емкостное сопротивление, усилие  и другие технологические параметры.
и другие технологические параметры.
Индуктивные датчики
Конструктивно состоят из магнита, провода, пакета электротехнической стали, на который намотана катушка индуктивности, а также подвижного…Схема включения индуктивного датчика уровня
Электропроводящей жидкости в резервуаре
При перемещении поплавка вверх или вниз изменяется положение подвижного сердечника внутри катушки. Это приводит к изменению  (см. формулу)
(см. формулу)

Таким образом данный индуктивный датчик преобразует изменение уровня жидкости Н большое в резервуаре в измерение индуктивного сопротивления
Конструкционная схема включения и принцип работы темзодатчиков
Темзодатчики конструктивно состоят из листобумаги, на которую приклеивается зигзагообразно тонкая медная проволока диаметром Ø мм.
мм.
Поверх этой проволоки для прочности наклеивается еще один лист бумаги.
Данная конструкция в свою очередь наклеивается на деталь, которая подвергается в ходе технологического процесса деформации F.

Конструкция и принцип работы термометров сопротивления и полупроводниковых терморезисторов (стр. 29)
Термометры сопротивления – основаны на свойстве проводников менять сопротивление при изменении температуры. Изготовляются из числа металлов: медь, железо, никель и т.д. Электрическое сопротивление при нагреве металлов увеличивается. Металлический термометр сопротивления, используемый в качестве датчика температуры, выполняется из проволоки ( мм), намотанный на слюдяной или фарфоровый, кварцевый каркас. Каркас находится в защитной трубке. Сопротивление термометра при нормальной температуре 50-100 Ом. Погрешность – из-за колебаний напряжения и температуры окружающей среды, нагрева термодатчика.
мм), намотанный на слюдяной или фарфоровый, кварцевый каркас. Каркас находится в защитной трубке. Сопротивление термометра при нормальной температуре 50-100 Ом. Погрешность – из-за колебаний напряжения и температуры окружающей среды, нагрева термодатчика.
Полупроводниковые терморезисторы – представляет собой оксиды, сульфиды, нитриды или карбиды металлов. Сопротивление терморезисторов в отличие от металлов уменьшается при повышении температуры, т.е. они имеют температурный коэффициент сопротивления, причем по величине обратно пропорциональный квадрату абсолютной температуры. Терморезисторы по сравнению с металлическими термопроводниками имеют более высокую чувствительность, обладают высоким удельным (до 103 Ом*см) и общим сопротивлением
Схема включения термометров сопротивления терморезисторов и темзометрических датчиков (стр. 34-35 рис. 2.10а)
 Работа уравновешенного моста основана на нулевом методе измерений. При этом в мосте создается сопротивление
Работа уравновешенного моста основана на нулевом методе измерений. При этом в мосте создается сопротивление  , можно добиться равенства потенциалов точек А и Б, следовательно, отсутствие тока в диагонали моста измеряемого миллиамперметром мА с двухсторонней шкалой. При отсутствии тока в диагонали можно написать
, можно добиться равенства потенциалов точек А и Б, следовательно, отсутствие тока в диагонали моста измеряемого миллиамперметром мА с двухсторонней шкалой. При отсутствии тока в диагонали можно написать  ,
,  , а также
, а также  ,
,  , поделив последние равенства и учитывая предыдущие, получим
, поделив последние равенства и учитывая предыдущие, получим  , откуда
, откуда  . Следовательно, если шкалу сократить отградуировать в градусах, то по положению ползунка соответств. уравновеш. поступ. производить отсчет температуры. Достоинством такого метода измерения температуры является его высокая точность. Необходимо уравновеш.
. Следовательно, если шкалу сократить отградуировать в градусах, то по положению ползунка соответств. уравновеш. поступ. производить отсчет температуры. Достоинством такого метода измерения температуры является его высокая точность. Необходимо уравновеш.
Фотодатчики (датчики освещенности)
Схема включения и принцип работы фоторезисторов.

Фотодатчики преобразуют изменение освещенности в изменение активного сопротивления полупроводникового кристалла.
Пока кристалл полупроводника, например, германия или кремния, неосвещен, его активное сопротивление достаточно большое – 1 кОм.
При попадании на кристалл квантов света атомы в узлах кристаллической решетки получают дополнительную энергию, которая позволяет валентным электронам покинуть свою орбиту, становясь свободными. При этом активное сопротивление кристалла резко уменьшается.
Фотодиоды включения и принцип работы фотодиодов.
Конструктивно фотодиод подобен обычному диоду, но в его корпусе имеется стеклянное окошко, через которое на переход…Тахогенераторные датчики
Предназначены для преобразования скорости вращения рабочего механизма в индуцированную ЭДС е на выходе датчика. а) б) а) тахогенератор постоянного тока состоит из неподвижной обмотки возбуждения и вращающейся под действием рабочего…Общие сведения об усилителях, структурная схема усилителя.
Классификация и основные параметры усилителей
Усилитель – это устройство автоматики, в котором входной электрический сигнал увеличивается до необходимого значения за счет внешнего источника питания
Структурная схема усилителя
- УЭ – (усилительный элемент) – транзистор, тиристор, электронная лампа, микросхема, электромагнитный дроссель, реле;
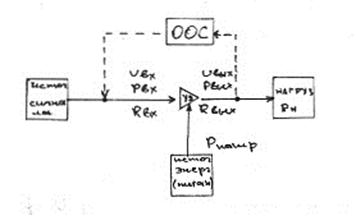
- Источник сигнала – датчики различного назначения и различных конструкций, сравнивающее устройство, микрофон, звукостиратель, магнитная головка и т.д.;
- Нагрузка  – исполнительные двигатели постоянного и переменного тока, их управление обмотки, электромагниты, сигнальные лампы, измерительные приборы, громкоговорители и сирены;
– исполнительные двигатели постоянного и переменного тока, их управление обмотки, электромагниты, сигнальные лампы, измерительные приборы, громкоговорители и сирены;
- Источники энергии (питания) – гальванические элементы или батареи гальванических элементов, аккумуляторы, выпрямители, стабилизаторы, солнечные батареи;
- ООС – цепь отрицательной обратной связи, резистор, трансформатор, -цепь.
В качестве нагрузки также может использоваться усилитель мощности или такой же каскад усиления.
Классификация усилителей
В зависимости от физического принципа работы усилители делятся на:
1) электронные (на вакуумных лампах);
2) полупроводниковые (транзисторы);
3) электромагнитные;
По количеству каскадов усиления усилители бывают:
1) однокаскадные
2) многокаскадные (не более 4-5 каскадов)
По виду усиливаемого сигнала усилители делятся на:
1) усилители переменного тока (в т.ч. усилители звуковой частоты);
2) усилители постоянного тока;
3) импульсные усилители;
4) фазочувствительные усилители.
По частоте усилители подразделяются на:
1) низкой частоты;
2) высокой частоты;
3) сверхвысокой частоты.
По назначению усилители бывают:
1) предварительные (усилители направления);
2) усилители мощности.
Основные параметры усилителей:
1. Выходная мощность – максимальная полезная мощность на выходе усилителя, при которой искажение сигнала не превышает допустимых значений
 (Вт)
(Вт)
2. Коэффициент изменения по току напряженной мощности – число, означающее, во сколько раз выходной сигнал больше входного
 ;
; ;
; 
3. Коэффициент полезного действия – показывает, какая часть мощности, потребляемая усилителем от источника питания, превращается в полезную мощность (выходную), а какая превращается в мощность потерь
4. Чувствительность усилителя – значение входного сигнала усилителя, при котором на его выходе образуется номинальный выходной сигнал 
5. Диапазон усиливаемых частот (полоса пропускания) – область частот входного сигнала, которая усиливается без искажений  Гц.
Гц.
6. Входное сопротивление усилителя – параметр показывающий степень влияния входа усилителя на источник сигнала
 , (Ом)
, (Ом)
7. Выходное сопротивление усилителя – параметр, показывающий степень влияния усилителя на нагрузку
 , (Ом)
, (Ом)
В курсе автоматики будут изучаться электромагнитные и фазочувствительные усилители.
Тема 2.6. Конструкция, схема и принцип работы магнитного усилителя без начального подмагничивания

Магнитные усилители в системах автоматики используются в качестве усилителей мощности (например: для управления исполнительным двигателем), в качестве датчиков тока безконтактным магнитным реле, а также в качестве преобразующего сигнала постоянного тока в сигнал переменного.
Магнитный усилитель конструктивно состоит из магнита провода, изготовленного из плоских электротехнической стали на среднем стержне которого размещена управл. Оболочка « » на двух смежных стержнях расположены две рабочие обмотки «
» на двух смежных стержнях расположены две рабочие обмотки « », которые соединены между собой последов.-согласно.
», которые соединены между собой последов.-согласно.
К этим обмоткам через сопротивление нагрузки « » подключено напряжение источника питания «
» подключено напряжение источника питания « ».
».
Входной сигнал этого усилителя представляет собой напряжения управления « » (например: со входа термопары)
» (например: со входа термопары)
Выходным сигналом является падение напряжения на сопротивлении нагрузки «» (например, исполнительного двигателя управл. обмотка)
При отсутствии входного сигнала ( ) по рабочим обмоткам усилителя протекает начальный ток «
) по рабочим обмоткам усилителя протекает начальный ток « », который имеет незначительную величину (10-30 мА). Вследствие проникания этого тока на сопротивление нагрузки выделяется начальная мощность
», который имеет незначительную величину (10-30 мА). Вследствие проникания этого тока на сопротивление нагрузки выделяется начальная мощность  , которая также имеет небольшое значение.
, которая также имеет небольшое значение.
При поступлении на обмотку управления постоянного управляющего напряжения «». Этот ток намагничивает средний стержень, а значит, магнитная проницаемость его  резко уменьшается.
резко уменьшается.
Переменный ток , проникая по рабочим обмоткам, создает переменный магнитный поток  , который циркулирует по магнитопроводу, проходя в том числе и через средний стержень, следовательно, при уменьшении магнитной проницаемости индуктивность рабочих обмоток также резко уменьшается:
, который циркулирует по магнитопроводу, проходя в том числе и через средний стержень, следовательно, при уменьшении магнитной проницаемости индуктивность рабочих обмоток также резко уменьшается:
В результате индуктивное сопротивление этих обмоток также уменьшиться.
Поэтому ток проходящей по этим обмоткам и сопротивление нагрузки резко увеличивается

Следовательно, выходная мощность усилителя (мощность сопротивления нагрузки) также резко увеличивается.

Определим коэффициент усиления по мощности этого усиления
где

– входная мощность (мощность управл.) усилителя
| Например: | |
| UУ=0,005В |  мА мА
|
| IУ=1мА |  мА мА
|
| U0=110B |  Ом Ом
|
| Рассчитать: Кр-? | |
|
| Pвых=I02*Rн
Рвых=6002*10-3*8=2,88
 Вт Вт
 Вт Вт
|
Процесс усиления, т.е. принцип работы этого усилителя коротко можно описать с помощью следующих логических связей

Как видно из приведенных логических связей, появление напряжения управления на входе усилителя вызывает резкое увеличение выходной мощности усилителя.
Из графика видно, что смена полярности управл. напряжения не влияет на усилительные свойства усилителя.
Достоинства и недостатки магнитных усилителей (Поспелов 57-58)
Магнитные усилители работают на частотах питания в пределах 50-500 Гц и имеют коэффициент усиления по мощности достигающий 10000 и выше
Магнитные усилители получают все более широкое применение, т.к. по сравнению с др. усилителями они имеют ряд преимуществ:
- высокую надежность при постоянной готовности к работе, простоте обслуживания и неограниченном сроке службы;
- высокую перегрузочную способность и стабильность характеристик в неблагоприятных условиях (вибрация, тряска, пыль, грязь, влажность и др.)
- широкий диапазон мощностей – от нескольких ватт до нескольких сотен киловатт;
- высокий коэффициент усиления (до 105 на каскад) и возможность усиления весьма малых (10-17) сигналов
Недостатки магнитных усилителей – сравнительно высокая … (0,08-4), большие размеры и масса при частоте 50 Гц.
Схема и принцип работы дифференциального
Фазочувствительного усилителя
В системах автоматики находят применение датчики выходным сигналом которых является сдвиг фаз между двумя напряжениями…Дифференциальный фазочувствительный усилитель (Гордин)
Если сдвиг фаз между входным сигналом и опорным напряжением отличается на 0º, 90º, 180º, то ток в обмотке M идет в одном и другом… В схеме предусмотрен диод V3. Принципиально усилитель может работать и без… Ток в нагрузке существует лишь в течение половины периода и поэтому имеет большую пульсацию, что затрудняет применение…Тиристорные преобразователи частоты
В системах автоматики (например, в системах автоматизированного управления электроприводом – «УЭП») часто возникает необходимость регулирования частоты вращения электродвигателей переменного тока, эту задачу можно решить тремя основными способами:
1) изменением величины напряжения на статоре двигателя
2) введением в цепь статоров или роторов резисторов
3) изменением частоты питающего напряжения
Преобразователи частоты бывают двух видов:
- электромагнитные;
- статические полупроводниковые (тиристорные)
В современных устройствах автоматики применяют тиристорные преобразователи частоты.
Структурная схема тиристорного преобразователя частоты
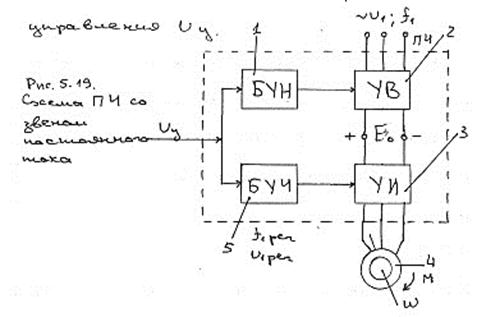
Преобразователь состоит из следующих основных блоков: тиристорного управляемого выпрямителя УВ, тиристорного управляемого инвендиода УИ, блока управления напряжением БУН и блока управления частотой БУЧ.
Напряжение сети переменное  промышленной стандартной частоты f1=50Гц поступает на вход управляемого выпрямителя, который преобразует переменное напряжение, это напряжение можно регулировать в широких пределах с помощью БУН, который в свою очередь управляет напряжением управленияUУ.
промышленной стандартной частоты f1=50Гц поступает на вход управляемого выпрямителя, который преобразует переменное напряжение, это напряжение можно регулировать в широких пределах с помощью БУН, который в свою очередь управляет напряжением управленияUУ.
Выпрямленное напряжение Е0 сглаживается индуктивно-емкостным фильтром Lф, Cф и поступает на вход управляемого инвентора.
УИ преобразует это напряжение в трехфазное переменное напряжение U1, требуемой частоты f1
Необходимую частоту регулируют с помощью блока управления частотой, БУЧ которой также управляется с помощью напряжения управления. Таким образом, данный преобразователь имеет возможность регулирования как частоты выходного напряжения тока и его величины.
Недостатком таких преобразователей является то, что форма выходного напряжения приближается к синусоидальной.
Тема 2.6. Стабилизаторы напряжения. Общие сведения о стабилизаторах. Классификация и основные параметры стабилизатора.
Стабилизатором напряжения называется устройство автоматики, которое при изменении напряжения на его входе в пределах ±20% поддерживает выходное напряжение неизменным.
Стабилизаторы применяются в системах автоматики в качестве блоков питания и блоков задания (задающих устройств). Стабилизировать напряжение необходимо, т.к. нестабильность их может привести к выпуску некачественной продукции, сбоем в работе электрооборудования и даже авариям.
По принципу работы стабилизаторы делятся на параметрические и компенсационные.
По роду тока бывают стабилизаторы постоянного и стабилизаторы переменного напряжения.
По виду стабилизирующего элемента стабилизаторы бывают электронные на лампах, полупроводниковые на стабилизаторах и транзисторах, ферромагнитные и феррорезонансные на электромагнитных дросселях с применением конденсаторов.
По мощности стабилизаторы делятся на: маломощные до 50 В, средней мощности до 2 кВ и большой мощности – свыше 2 кВ.
Стабилизаторы переменного напряжения включаются между сетью и нагрузкой.
Стабилизаторы постоянного напряжения включаются между выпрямителем и нагрузкой
Основными параметрами, характеризующими работу стабилизатора напряжения, являются:
- входное напряжение Uвх,
- выходное напряжение Uвых
- пределы изменения входного напряжения ∆ Uвх
- пределы изменения выходного напряжения ∆ Uвых
- коэффициент стабилизации – отношение относительного изменения входного напряжения к относительному изменению выходного напряжения
- 
Схема и принцип работы параметрического постоянного напряжения
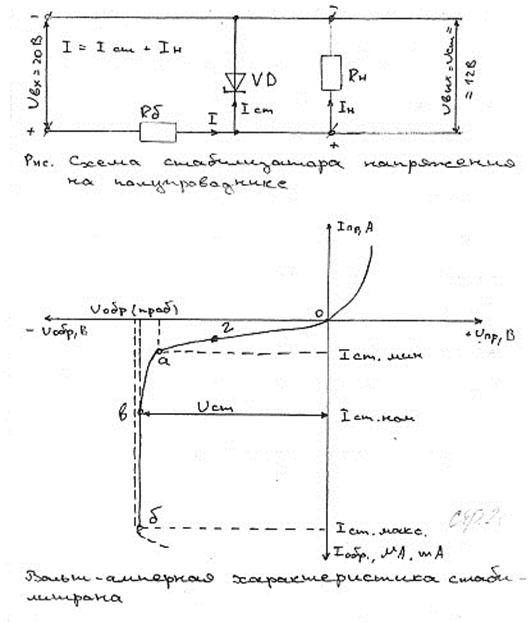
Вольт-амперная характеристика и
Схема включения параметрического стабилизатора
Предположим, по входящему стабилизатору подается напряжение Uвх=20В. При этом стабилизатор VD находится в состоянии электропробоя при Uобр равном Uст и равным 12В, и по нему протекает ток и балансному сопротивлению Rб протекает ток Iст.ном=10 мА.
Выходное напряжение стабилизатора Uвых=12В, т.к. сопротивление нагрузки  подключено параллельно стабилитрону.
подключено параллельно стабилитрону.
Если входное напряжение увеличивается Uвых=24В, то ток через стабилитрон также увеличивается и станет равным Iст.мах=20мА (точка б). При этом напряжение на стабилитроне станет равным Uст=12.2В, т.е. практически не изменился, а, следовательно, не изменится и выход напряжения стабилизатора.
При уменьшении входного напряжения до Uвх=16В ток стабилизации через стабилитрон также уменьшится и станет равным Iст.мин=5мА (точка а), при этом напряжение на стабилитроне также практически не изменится. Uобр=Uст=Uвых=11.8В
Таким образом, изменение входного напряжения в пределах ±20% не вызывает изменение выходного изменения стабилизатора, т.е. напряжение на нагрузке остается практически неизменным.
При резком уменьшении Uвх (точка г) электрический пробой в стабилитроне прекращается и стабилизатор прекращает выполнять свои функции.
При значительном увеличении Uвх Iст увеличится на столько, что p-n переход стабилитрона перегреется и произойдет необратимый тепловой пробой.
Схема и принцип работы ферромагнитного стабилизатора переменного напряжения (Поспелов, с.50-51)
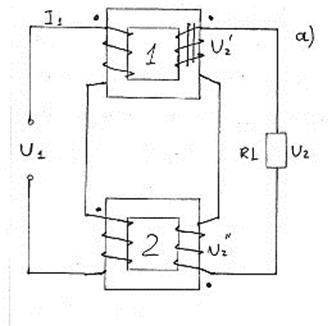
Рис. 1. Схема ферромагнитного стабилизатора переменного тока
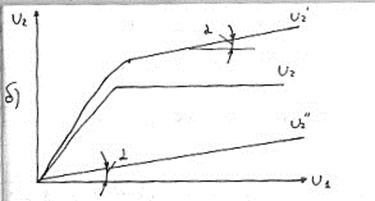
Рис.2. Характеристика ферромагнитного стабилизатора напряжения
Ферромагнитный стабилизатор напряжения основан на использовании явления магнитного насыщения ферромагнитного сердечника, он состоит из двух трансформаторов 1 и 2, первичные обмотки которых намотаны согласно, соединены последовательно и подключены и напряжению U сети. Вторичные обмотки намотаны встречно и соединены последовательно.
Сердечник трансформатора 1 изготовлен из стали, обладающей большой индукцией, а сердечник трансформатора 2 – из стали с малой индукцией, благодаря чему первый насыщается быстро и резко, а второй – медленно и плавно.
При увеличении первичного напряжения U1, напряжение U2// возрастет плавно (рис. 2), тогда как напряжение U2/ сначала возрастает резко, а при достижении насыщения продолжает возрастать также плавно.
Трансформаторы рассчитываются так, чтобы в диапазоне изменений напряжение U1 кривые, соответствующие напряжениям U2/ и U2// имели одинаковый угол наклона , тогда выходное напряжение U2 равное разности U2/ и U2// будет в этом диапазоне постоянным.
| Расчет коэффициента стабилизации: | 



|
Решение:
 Ответ:
Ответ: 
|
Схема и принцип работы компенсационного стабилизатора постоянного напряжения»

Такие стабилизаторы применяются при токах стабилизации до 15А и имеют более высокий коэффициент стабилизации по сравнению с параметрическими.
В исходном состоянии Uвх=20В, Uвых=12В при этом транзисторы VT1 и VT2 приоткрыты положительным напряжением … Uб1 и Uб2, которые подаются на базы этих транзисторов через резисторы R1 и R3+ R4, при этом по стабилизатору VD течет ток Iст=10мА, напряжение стабилизации стабилитрола Uст=5.6мА ( находится в режиме электрического пробоя).
находится в режиме электрического пробоя).
Предположим, что Uвх увеличилось до 24В, вследствие этого в первый момент времени Uвых также стремится увеличиваться.
Uб2 также увеличится, но напряжение на эмиторе этого транзистора Uст останется неизменным, поэтому VT2 приоткрывается. Это вызывает уменьшение сопротивления участка коллектора – эмитор этого …, что приведет к уменьшению напряжения на его коллекторе Uк2= Uб1.
Т.к. напряжение на базе первого транзистора уменьшилось, то и падение напряжения на участке коллектор - эмитор Uкэ1 также уменьшится.
Параметры транзисторов и др. элементов схемы стабилизатора подобраны таким образом, чтобы увеличение входного напряжения соотв. такому же увеличению Uкэ1.
| Поскольку |  , то , то
 +4 +4
+4 +4
|
Увеличение Uвх и Uкэ1 на 4В не вызывали увеличения выходного напряжения.
Таким образом, стабилизатор скомпенсировал увеличение входного напряжения, при этом выходное напряжение осталось неизменным и равным 12В.
Переменным резистором R4 можно в некоторых пределах изменить выходное напряжение.
Уменьшение входного напряжения до 16В вызывает обратную реакцию.
Предположим, что Uвх уменьшилось до 16В, вследствие этого в первый момент времени Uвых также стремился уменьшиться.
Uб2 также уменьшится, поэтому VT2 призакрывается. Это вызывает увеличение сопротивление участка коллектор - эмитор этого транзистора, что приведет к увеличению напряжения на его коллекторе.
Т.к. напряжение на базе первого транзистора увеличилось, то и падение на участке коллектор – эмитор Uкэ, также увеличивается.
Тема 2.7. Переключающие устройства. Классификация, назначение и статическая характеристика переключающий устройств.
Переключающие устройства (ПУ), предназначенный для коммутации электрических цепей, автоматических устройств (цепи регулирования, управления, контроля, защиты и сигнализации), а также для коммутации их силовых цепей.
Переключающие устройства делятся на:
1) электромеханические;
2) электронные
Электромеханические ПУ бывают только контактные, а электронные переключающие устройства контактные и бесконтактные.
В контактных ПУ переключающим элементом является, одна или несколько контактных групп электрических аппаратов, а в бесконтактных переключающим элементом является транзистор тиристор, электронная лампа, логический элемент или триггер, построенный на основе логических элементов.
К контактным ПУ относятся электромагнитные реле постоянного и переменного тока, герконовые реле, реле максимального тока, тепловые реле, электромеханические реле времени и скорости, контакторы и магнитные пускатели.
К бесконтактным ПУ относятся электронные реле времени и скорости, фотореле, термореле и т.д.
Статическая характеристика любого ПУ имеет следующий вид (рис.1)

Рис. 1 Статическая характеристика любого ПУ
По оси У откладываются два устойчивых состояния перекл. устройства: Уср-Увкл, переключающее устройство вкл. Уотн-Уоткл перекл. устройство отключено.
ПУ может переходить из одного состояния в другое под воздействием внешнего управляющего сигнала – ток, напряжения, освещенность, скорость, вращение, давление, температура, время и т.д.
По оси Х откладывается величина этого сигнала: Хвкл-Хср – величина, при которой ПУ переходит из отключенного состояния в …; Хотн.-Хоткл. величина, при которой ПУ переходит из вкл. состояния в откл.
Таким образом, переключающие устройства могут изменять свое состояние при изменении уравновешивающего сигнала.
Конструкция и принцип работы электромагнитного реле постоянного тока.
При подаче направления питания на обмотку 3 (или плавного увеличения напряжения до значения Uвкл) в сердечнике 2…Конструкция и принцип работы герконового реле постоянного тока
Достоинством таких реле является то, что они малогабаритны, потребляют небольшой ток, их контакты не окисляются, не…Схема и принцип работы простейшего электромагнитного реле.
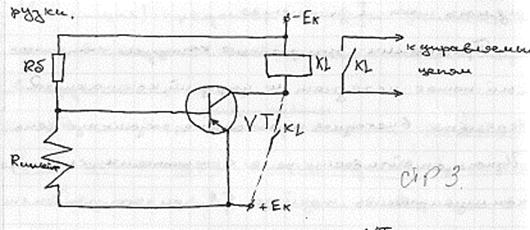
В качестве датчика используется отрезок тонкой медной проволоки, расположенной по периметру охраняемого объекта, который называется шлейфомRш.
Поскольку сопротивление шлейфа очень мало (1,2 Ома), то база транзистора VT закорочена с его эмиттером, а значит, напряжение на подаваемое на эмитерный переход равно 0. При этом эмиторный переход имеет большое сопротивление транзистр запорт напряжение на его коллекторе Uкэ≈Ек (приблизительно равно). Обмотка промежуточного реле RL не получает питания, реле находится в исходном состоянии.
При разрыве Rш перемычка исчезает, на базу транзистора через R1 подается отрицательное напряжение смещения. Эмиторный переход получает прямое включение, сопротивление уменьшается, транзистор открывается и напряжение на его коллекторе резко уменьшается.
Обмотка KL получает питание, оно срабатывает и своим контактом включает сигнальную лампу HL (или сирену)
Недостатком этой схемы является то, что при восстановлении целостности шлейфа сигнализация отключается.
Схема и принцип работы электромагнитного контактного реле времени

Применяется для коммутации исполнительных цепей систем автоматически через заданные промежутки времени (выдержки времени)
В исходном состоянии кнопка SB не нажата, конденсатор с зарядом от источника стабилизированного напряжения Eста. через резистор R1 и замкнутые контакты SB.
Поэтому на его верхней обкладке, которая подключена к базе транзистораVT, имеется положительный потенциал Uс. =Uб. =+3В. В эту же точку на базу подается отрицательное напряжение смещения Uсм=-1В, со средней точки делителя напряженияR2-R3, результирующее напряжение на базе Uбэ.=+3-1=+2В. Следовательно, транзистор заперт, промежуточное реле KL отключено и двигатель M не вращается.
При нажатии кнопки SB и фиксации ее в разомкнутом состоянии конденсатор C начинает разряжаться через резистор R3, как только напряжение на конденсаторе станет равным нулю, то Uбэ=-1В, транзистор открывается и ток, протекающий по цепи +Ек→KL→коллектор→эмитор VT→-Ек заставляет сработать KL. Контакт KL замыкается, подавая питание на обмотку двигателя.
Время, прошедшее с момента нажатия кнопки до момента включения двигателя, называется выдержкой времени реле. Поскольку это время разряда конденсатора токаС, то выдержку времени можно регулировать двумя способами – для увеличения выдержки времени увеличивают или емкость С или сопротивление R3.
Схема и принцип работы электрического бесконтактного реле.
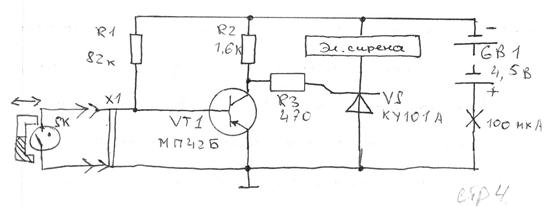
Применяется в качестве охранных устройств. Если вместо сирены в качестве нагрузки установить исполнительный электродвигатель или другое устройство, то может применяться в других системах автоматики.
В исходном состоянии база VT1 транзистора закорочена с эмиттером с помощью замкнутых контактов геркона SK (постоянный магнит находится вблизи геркона). При этом транзистор заперт, т.к. на эмиттэрный переход не подается U питания.
Напряжение на коллекторе транзистора большее отрицательное Uк1= -3В, поэтому тиристор VS заперт, на электрическую сирену не подается питание, и она не работает.
При отключении магнита влево (открывающие двери) контакт SK размыкается, на базу VT1 поступает отрицательное напряжение смещения от источника питания через резистор R1. VT1 открывается, и напряжение на его коллекторе резко уменьшается до -0.5В.
Этот перепад напряжения через резистор R3 поступает на управляющий электрод тиристор VS, он открывается и подает напряжение питания на сирену.
Если теперь вновь приблизить магнит к геркону, то транзистор закроется, но это не приведет к запиранию тиристора, а значит, сирена будет продолжать работу.
Тема 2.8. Логические операции и логические элементы
В схемах современных систем автоматики большое применение получили логические элементы и более сложные устройства, которые реализуются на их основе.
Логические элементы широко используются для построения бесконтактных систем управления электроприводами, а так же бесконтактных систем автоматики управления, регулирования и контроля.
Рассмотрим несколько упрощенных схем, которые иллюстрируют работу основных логических операций, и составим для каждой из них таблицу истинности.
Условимся, что воздействие на контакт SB1 и SD2 является входными сигналами логических операций: если кнопки нажаты, то этот сигнал логической единицы («1»), а если кнопка не нажата, то это сигнал логического нуля («0»).
Условимся также, что выходным сигналом логической операции является состояние сигнала лампы HL: если лампа горит «1», а если не горит – «0».
Логическая операция «2-ИЛИ»

Логическая операция «2-И»

Логическая операция «НЕ»
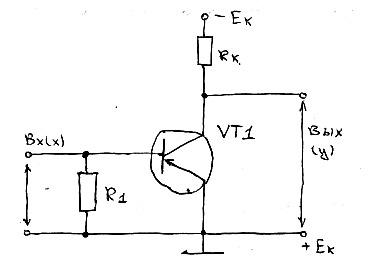
В бесконтактных электрических схемах логические операции как правило реализуются с помощью логических элементов, которые состоят из диодов транзисторов, интегральных микросхем. Поэтому для таких логических элементов сигналом логического нуля является сравнительно небольшое  относительно общего провода, а сигналом «1» сравнительно большее напряжение относительно общего провода.
относительно общего провода, а сигналом «1» сравнительно большее напряжение относительно общего провода.
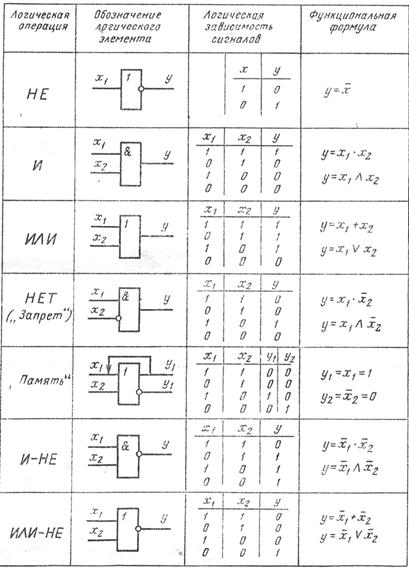
Электрические упрощенные схемы, условные графические обозначения и таблицы истинности основных логических элементов.
Данный элемент осуществляет операцию инверсия, т.е. отрицание (на Х) Если на вход Х подать логический 0 относительно общего провода (например-0.2В), то этого напряжения будет…Таблица истинности и
Условное графическое обозначение элемента «2И-НЕ».
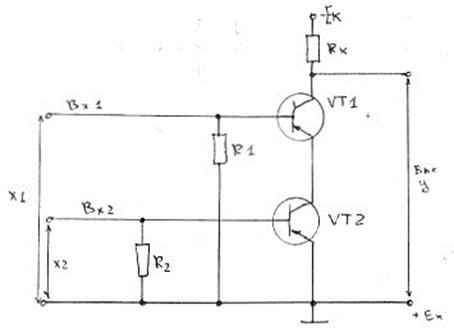
Если на оба входа Х1 и Х2 подаются логические «0» (маленькое напряжение относительно общего провода), то оба транзистора заперты, а значит на коллекторе VT1 большое отрицательное напряжение, т.е. логическая «1».
Если на один из входов подан логический «0», а на второй – логическая «1», то хотя бы один из транзисторов заперт, а значит на выходе «у» логическая «1» и если и на вход X1 и на вход X2 подать логические «1», то оба транзистора откроются и на выходе - у- будет логический «0». Эта операция называется … умножением с инверсией. 
Упрощенная схема, таблица истинности и
Условное графическое обозначение логического элемента «2ИЛИ-НЕ»
Если на оба входа и подаются логические «0», то оба транзистора заперты, а значит на выходе - у – логическая «1», если…Упрощенная схема логического элемента, таблица истинности и условное обозначение логического элемента «память».

Если необходимо на какое-то время запомнить сигнал логическая «1», то этот сигнал подается на вход  , при этом на выходе
, при этом на выходе  будет сигнал, то на выходе логический «0». Поступив на вход
будет сигнал, то на выходе логический «0». Поступив на вход  на выходе
на выходе  получаем «1», эта логическая «1» по цепи обратной связи поступает на вход
получаем «1», эта логическая «1» по цепи обратной связи поступает на вход  . Теперь какой бы сигнал не поступал на вход все равно на выходе будет логическая «1». Таким образом сигнал логическая «1» «запоминается». Для того, чтобы очистить память, достаточно на вход
. Теперь какой бы сигнал не поступал на вход все равно на выходе будет логическая «1». Таким образом сигнал логическая «1» «запоминается». Для того, чтобы очистить память, достаточно на вход  подать логическую «1».
подать логическую «1».
Тема 2.9. Назначение и классификация исполнительных устройств
Электрические исполнительные устройства преобразуют электроуправляющий сигнал «Uу» в линейное или вращательное перемещение регулирующего органа в сигналы автоматики.
Все Uу делятся на электродвигательные и электромагнитные. К электродвигательным относятся двигатели постоянного и переменного тока сравнительно небольшой мощности до 100 Вт и шаговые двигатели.
К электромагнитным исполнительным устройствам относятся электромагнитные вентили, клапаны, задвижки и т.д.
Конструктивно представляют собой мощный электромагнитный якорь, который механически связан с регулирующим органом.
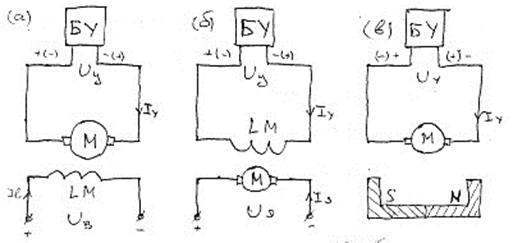
Схемы электродвигательных исполнительных устройств
Во всех 3-х схемах в качестве блока управления Б.у. применяются электромеханические или электронные устройства, позволяющие изменять напряжение… Изменение этого напряжения будет вызывать скорость вращения двигателей. Изменение направления вращения достигается изменением полярности Uу или напряжения возбуждения Uв.Конструкция и принцип работы электромагнитных исполнительных устройств
Исполнительные устройства с электромагнитным приводом представляет собой совокупность электромагнита и перемещаемой им механической нагрузки… - в устройстве первой группы магнит рассчитан на длительное пропускание… - электромагнит не рассчитан на длительное пропускание рабочего тока.Схема и принцип работы сравнивающих устройств.
Сравнивающих устройства предназначены для непрерывного сравнения 2-х электрических сигналов х(t) пропорционально эталонному параметру и сигнала y(t) который пропорциональный действительному регулировочному параметру. В результате сравнения на выходе СУ образуется сигнал разсоглосования Z(t)=x(t)-y(t)

В качестве сравнивающих устройств в системе автоматики применяются механические, электромеханические и электрически устройства. Наибольшее распространения а современных САР получили сравнивающие устройства выполнены на делителях напряжения.

Сравнивающее устройство представляет собой делитель U на резисторах R1 и R2 на первый вход СУ подается сигнал x(t) через резистор R1 например с задающего устройства.
На второй вход подается сигнал y(t) через R2 (например, с датчика).
На средней точки делителя в месте соединительных резисторов возник сигнал рассогласования Z(t)=x(t)-y(t),который поступает на вход операционного усилителя ОУ.
Если x(t)=y(t) то сигнал рассогласования =0, а значит U на входе и выходе усилителя отсутствует. Если по каким либо причинам y(t) изменится на появления сигнал рассогласования с напряжением или с отрицательным знаком, он усилившись усилителем и поступает далее в систему автоматики.
Большое распространение в качестве сравнивающего устройства в системе автоматики получили компараторы выполняемые на микросхемах.
Схемы и принцип работы корректирующих и вспомогательных устройств
В качестве корректирующего устройства в современных системах автоматики широко используются RC цепи и операционные усилители с использованием RC…Назначение, классификация и обобщенная структурная схема САК
Автоматический контроль – это область автоматики, изучающая и создающая технические средства, которые освобождают человека от непосредственного наблюдения за ходом технологического процесса и состоянием параметров этого технологического процесса. (ТП)
Системы автоматического контроля предназначены для объективной качественной и количественной оценки параметров технологических процессов проверки качества обработки или изготовления изделий, оценки, массы, размеров и количества изделий.
Все САК в зависимости от производящего элемента (устройства ВУ) делятся на системы автоматического измерения САИ и системы автоматической сигнализации (САС)
Обобщенная структурная схема САК
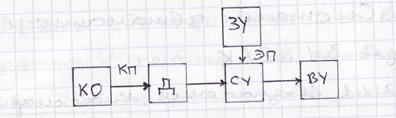
С объекта с контролируемого « » контролируемый параметр «
» контролируемый параметр « » поступает на датчик «
» поступает на датчик « », где преобразуется в электрический сигнал.
», где преобразуется в электрический сигнал.
С выхода датчика этот сигнал поступает на первый вход сравнивающего устройства « » на второй вход «» поступает эталонный параметр «
» на второй вход «» поступает эталонный параметр « » в виде электр. сигнала, который вырабатывается в задающем устройстве «
» в виде электр. сигнала, который вырабатывается в задающем устройстве « ».
».
С выхода «» снимается сигнал рассогласования, который поступает на воспроизводящее устройство « » (При необходимости сигнал рассогласования усиливается или переводится в другую форму)
» (При необходимости сигнал рассогласования усиливается или переводится в другую форму)
Воспроизводящее устройство указывает, записывает или сигнализирует информацию о значении контролируемого параметра «».
В качестве воспроизводящих устройств могут применяться:
1. Указывающие приборы (стрелочные и цифровые измерительные приборы, осциллограф, измерениями частотных характеристик и т.д.)
2. Регистрирующие приборы (самописец, … измерительный автоматический потенциометр, электронное запоминающее устройство – компьютер)
3. Сигнальные приборы (сигнальные лампы, светодиоды, мнемосхемы, звонки сирены, ревуны)
По характеру контроля во времени делятся на системы непрерывного контроля и системы периодического контроля.
По числу контролируемых параметров САК делятся на:
· системы одиночного контроля;
· системы множественного контроля.
По способу получения информации САК делятся на балансные и небалансные.
Схема и принцип работы небалансной САИ
(радиационного пирометра)

Тепловое излучение раскаленного тела 1 фокусируется с помощью линзы объектива 2 на рабочем … термопары 3. Термопара расположена в стеклянной колбе 6, заполненной … . Выходные клеммы термопары через усилитель постоянного тока УПТ соединяются с милливольтметром 5, шкала которого проградуирована в градусах температуры.
Чем больше температура раскаленного тела, тем больше разница между температурой рабочего спая и температурой свободных концов термопары, а следовательно, больше термо ЭДС  на выходе усилителя.
на выходе усилителя.
Усиленный сигнал подается на милливольтметр, который и показывает температуру тела.
Через окуляр 4 производится контроль точной наводки фокуса на рабочий спай термопары.
Такие системы просты по конструкции, но обладают значительными погрешностями, потери возникают в следствие изменения … и характеристики элементов прибора, а также вследствие изменения параметров окружающей среды.
Балансные системы автоматического измерения.
Структурная схема балансной САИ.
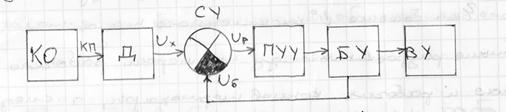
В отличие от небалансных систем такие САИ обладают более высоким быстродействием и высокой точностью измерения контролируемого параметра .
Параметр , действующий на объекте  преобразуется датчиком в электрический сигнал
преобразуется датчиком в электрический сигнал  , пропорциональный .
, пропорциональный .
Этот сигнал подается на первый вход сравнивающего устройства  , на второй вход подается сигнал отрицательной обратной связи в виде напряжения балансирования
, на второй вход подается сигнал отрицательной обратной связи в виде напряжения балансирования  , которая поступает с выхода балансирующего устройства БУ.
, которая поступает с выхода балансирующего устройства БУ.
Пока значения и показания воспроизводящего устройства равны (например, в печи  и по шкале измерительного устройства то же
и по шкале измерительного устройства то же  ), то система находится в равновесии.
), то система находится в равновесии.
При изменении значения контрольного параметра на объекте, например, увеличении или уменьшении температуры, сравнивающее устройство на своем выходе даст сигнал рассогласования:  , т.к. в первый момент времени будет не равно .
, т.к. в первый момент времени будет не равно .
Усиленный или преобразованный в преобразовательно-усилительном устройстве  сигнал рассогласования поступает на балансирующее устройство
сигнал рассогласования поступает на балансирующее устройство  , при этом начнет изменять показания воспроизводящего устройства, а также изменять напряжение балансирования , сигнал рассогласования на выходе начнет постепенно уменьшаться и как только вновь станет равным сигнал рассогласования станет равен 0.
, при этом начнет изменять показания воспроизводящего устройства, а также изменять напряжение балансирования , сигнал рассогласования на выходе начнет постепенно уменьшаться и как только вновь станет равным сигнал рассогласования станет равен 0.
Воспроизводящее устройство покажет новое значение контролируемого параметра и САИ придет в равновесие до следующего измерения контролирующего параметра.
Рассмотрим пример такой системы схему автоматического измерительного потенциометра.
Упрощенная схема и принцип работы
Автоматического измерительного потенциометра.
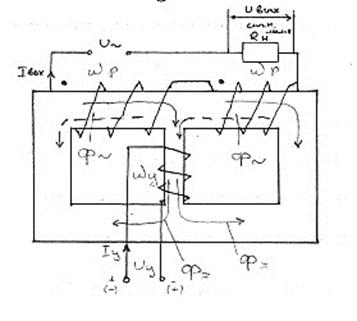
Автоматический измерительный потенциометр предназначен для автоматического измерения температуры в ходе различных…Схема и принцип работы системы дистанционной передачи угла поворота на переменном токе.
Системы дистанционной передачи (СДП) является частным случаем систем автоматического измерения. Наиболее часто в автоматике применяются СДП угла поворота какого-либо рабочего механизма RH
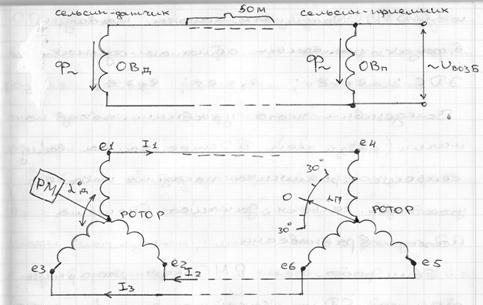
Система состоит из сельсин датчика СД, сельсин приемника СП и трехпроходные линии связи соединены с ротором обмотки СД и СП. Обмотки возбуждения сельсин датчика и сельсин приемника ОВД и ОВП подключены к U возбуждения ~UВОЗБ.
В исходном состоянии СД и СП повернуты на один угол £д >£п , поэтому фазы роторных обмоток расположены под одним углом по отношению к магнитным потокам Ф~, которая вырабатывает ОВД и ОВП. Эти магнитные потоки наводятся в фазах роторных обмоток одинаковые ЭДС: е1=е4; е2=е5; е3=е6 .
Вследствие этого сравнит. Токов по линии связи нет и стрелка на валу сельсин приемника показан на шкале угол поворота сельсин датчика. Система находится в равновесии.
Если рабочий механизм РМ повернет роторную обмотку СД на какой то угол £д, то направление магнитного потока по отношению к фазам роторной обмотки сельсин датчика изменится ЭДС : е1/ е2/ е3/
Поэтому по линиям связи потекут уравненные токи I1 I2 и I3. Протекание этих токов по фазам роторной обмотки СП вызовут появления собственного магнитного потока. Взаимодействие суммарного магнитного потока роторной обмотки СП и магнитного потока обмотки возбуждения. ОВП создаст вращающий момент и роторная обмотка начнет разворачивается вокруг своей оси. Как только она займет такое же положение как и роторная обмотка СД (£д/ = £п/)
ЭДС на вывод роторной обмотки станут равны : е4/=е1/; е5/=е2/; е6/=е3/. Уравненные токи исчезают ,магнитный поток ротора СП становится равным 0 и он останавливается при этом стрелка прикреплена на вал сельсин приемника укажет новый угол поворота рабочего механизма.
Схема и принцип работы системы дистанционной передачи угла поворота на постоянном токе.
На рис. приведена простейшая схема дистанционной передачи небалансного типа. Роль датчика Д в схеме выполняет кольцевой потенциометр, к двум диаметральным точкам которого подводится напряжение постоянного тока. С осью задающего устройства связаны три контактные щетки, которые скользят по потенциометру. Указаные щетки имеют смещение относительно друг друга на 1200. Щетки с приемником П связаны с помощью трех проводов, образующих линию связи ЛС через которую осуществляется питание приемника. Роль приемника П выполняет устройство, состоящее из трех одинаковых катушек, расположенных под углом 1200относительно друг друга, и вращающегося постоянного магнита. Отсчет показаний осуществляется с помощью стрелки, расположенной на оси магнита.

Предположим, что подвижная система датчика повернулась на какой-то угол, тогда щетки переходят с одних точек потенциометра на другие, имеющие новые значения потенциалов. В результате этого происходит перераспределение токов в обмотках приемника, что в свою очередь приводит к изменению их МДС. В этом случае магнитный поток, который создается обмотками приемника и направлен по его диаметру, поворачивается на угол, почти равный углу поворота оси датчика. В связи с тем, что постоянный магнит приемника вращается свободно, он устанавливается вдоль оси потока приемника, повторяя при этом движение оси датчика . В том случае, когда ось приемника преодолевает некоторый момент сопротивления, например, от сил трения, постоянный магнит приемника устанавливается не точно по оси потока, а с некоторым отклонением (ошибкой), которое тем больше, чем больше момент сопротивления и чем меньше поток, создаваемый катушками приемника. Рассмотренная система в основном применяется при малых моментах сопротивления, т.е. когда на оси приемника находится только легкая стрелка.
Схемы и принцип работы систем автоматической сигнализации. САС
САС предназначены для подачи звуков и световых сигналов, отображающих информацию о ходе технологического процесса. Существуют 3 вида САС:… Контрольная САС -служит для оповещения оператора о положении органов…Примером такой САС является схема аварийной противопожарной сигнализации

Применяются для оповещения оператора возникновении пожара на складе ГСМ. Датчиками являются фоторезистор R3,который вместе с делителем U R1 и R2 установлен на складе. С помощью 3х проводниковых линий он соединен с диспетчерской, в которой находятся остальные схемы и источники питание.
В исходных состояниях при отсутствии пожара R3 не освещен, поэтому его сопротивления велика ( 100 кОм ) при этом на базу VT1 поступает отрицательное напряжение через R6, которая запирает VT1 и VT2. Сирена не работает.
При возникновении вспышки света при пожаре сопротивления R3 резко уменьшается ( 100 Ом ) и через него на базу транзистора подается положительное напряжение со средней точки делителя R1 и R2. Поскольку это напряжение по абсолютному значению на 2-3 В превышает отрицательное напряжение, то VT1 откроется при протекании тока но это транзистору на R5 также создается положительное падение напряжения которое откроет VT2. Протекания тока по VT2 вызывает срабатывания промежуточного реле KL, которыми своим контактом подключает сирену к сети.
Переменный R6 служит для регулировки чувствительности сигнализации, путем изменением отрицательности напряжения на базе VT1. Диод VD служит для гашения импульса ЭДС самоиндукции, который возникает при открывании и закрывании транзистора VT2 в обмотке KL.
Тема: 3.2« Системы автоматического регулирования ( САР ) »
Назначение и структурная схема САР
САР предназначена для:
1) поддержание параметров технологического процесса на заданном уровне;
2) Изменение параметра технологического процесса по заданному закону во времени
Обе эти задачи необходимы для того чтобы технологический процесс проходил качественно с минимальными количества брака.
Все САР строятся по следующей структурной схеме
Рассмотрим работу САР в режиме подержании регулировки параметра на заданном уровне.
Если значение регулировки параметра y/(t) равно заданному значению, то электрический сигнал y(t) поступающий с датчика Д равен
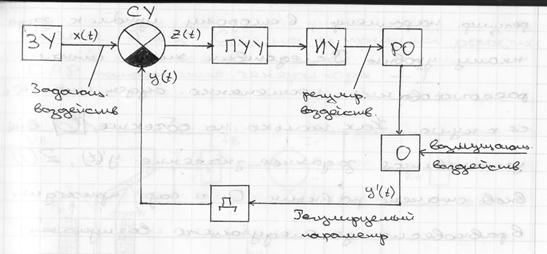
электрическому сигналу x (t) поступающего с задающего устройства ЗУ, при этом на выходе сравнивающего устройства СУ сигнал рассогласования Z(t)=x(t)-y(t)=0 поэтому САР находится в равновесии.
Если на объекте О из вне поступает возмущающее воздействие, то регулировка параметра y/(t) изменяя свою величину, а следовательно изменится электрический сигнал y(t).
На выходе СУ появляется сигнал рассогласования Z(t) определенного знака. Усилившись или преобразовавшись в ПУУ он поступает на исполнительное устройство ИУ и ИУ воздействует на регулировку органа РО, который начинает изменять регулируемый параметр, в сторону приближенная к заданному уровню. Вследствие этого сигнал рассогласования постепенно будет стремится к нулю. Как только на объекте О вновь установится заданное значение y/(t), Z(t) вновь станет равным О и САР приходит в равновесие до следующего возмущающего воздействия.
Рассмотрим работу САР в режиме изменения регулировки параметра во времени
Схема и принцип работы САР напряжения генератора –I В исходном состоянии САР находится в равновесии т.к. выходное Uг= заданному, при этом электрическая магнитная сила FЭ…Назначение и структурная схема САУ
САУ – предназначены для управления операциями технических процессов (пуск, торможение, реверс, изменение скорости и т.д.)
Особенность САУ является то что они в отличии от САР являются разомкнутыми т.е. в них отсутствует обратная связь по управляемому параметру. Поэтому в САУ нет возможности автоматического регулирования управлением параметр.
Обобщенная структурная схема САУ

Сигнал управления распространяется от задающего устройства ЗУ через управляющее устройство УУ исполнительное устройство ИУ к управляющему объекту УО.
В качестве управляющих объектов могут выступать вентиляционные, насосные, мостовые краны, конвейеры, печи, металлорежущие станки и т.д.
В качестве ЗУ вырабатывать задающее воздействие могут использоваться, как устройство памяти, (автоматически вырабатывать сигнал управления) так и аппаратуры ручного управления (вырабатывает управление сигнал под воздействием оператора).
В качестве управления устройств используется реле, контакторы, магнитные пускатели, усилители различных конструкций и тиристорные преобразователи.
Исполнительными устройствами могут быть электрические двигатели, электрические нагреватели и электромагниты различных конструкций (муфты, вентили, задвижки, тормоза, заслонки и т.д.)
Разновидностью САУ являются системы автоматической защиты САЗ и системы автоматической блокировки САБ.
Схема автоматического управления двигателем –I в функции времени

Схема содержит кнопки управления SB1 (пуск) и SB2 (остановка, стоп ДТП), линейный контактор КМ1, обеспечивающий подключение ДТП к сети, и контактор ускорения КМ2 для включения (закорачивания) пускового резистора Rд. В качестве датчика времени КТ. При подключении схемы к источнику питания происходит возбуждение ДПТ и срабатывает реле КТ, размыкая свой размыкающий контакт в цепи контактора КМ2 и подготавливая двигатель к пуску.
Пуск ДПТ начинается после нажатия кнопки SB1, в результате чего получает питание контактор КМ1, который своим главным контактом подключает ДПТ к источнику питания. Двигатель начинает разбег с резистором Rд в цепи якоря. Одновременно замыкающий блок-контакт контактора КМ1 шунтирует кнопку SB1 и она может быть отпущена, а размыкающий блок-контакт КМ1 разрывает цепь питания катушки реле времени КТ. Через интервал времени ∆tкт после прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замыкается в цепи катушки контактора КМ2, последний включится и своим главным контактом закоротит пусковой резистор Rд в цепи якоря. Таким образом, при пуске ДПТ в течении времени ∆tкт разгоняется по искусственной характеристике 1, а после шунтировки резистора Rд – по естественной 2. Величина сопротивления резистора Rд выбрана таким образом, что в момент включения двигателя ток I1 в цепи якоря и соответственно момент М1 непревосходит допустимого уровня. За время ∆tкт после начала пуска скорость вращения двигателем достигает величины ω1, а ток в цепи якоря снижается до уровня I2.После шунтировки Rд происходит бросок тока в цепи якоря от I2 до I1, которой непревышает допустимого уровня. Изменение сеорости, тока и момента во времени происходит по экспоненте. Время изменения скорости от нуля до уровня ω1, определяющее настройку реле КТ.
Назначение схемы и принцип работы систем автоматической блокировки и систем автоматической защиты
САЗ применяется для прерывания технологических процессов на защищенном объекте, при нарушении нормального режима работы, которая может привести к… 1) При возникновении токов КЗ 2) При длительных перегрузках технологического оборудования– Конец работы –
Используемые теги: Модуль, Тема, Понятие, автоматике, Роль, автоматики, автоматизации, технологических, процессов, производстве0.139
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Модуль I. Тема 1.1. Понятие об автоматике, роль автоматики в автоматизации технологических процессов на производстве
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.228 сек.
Новости и инфо для студентов