рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Радиолокационной информации
Реферат Курсовая Конспект
Радиолокационной информации
Радиолокационной информации - раздел Образование, Теоретические основы радиолокации 1.1. Принципы Получения Радиолокационной Информации Получение...
1.1. Принципы получения радиолокационной информации
Получение радиолокационной информации базируется на следующих основных принципах.
1. Информация получается путем возмущения среды распространения различными объектами, в частности за счет излучения объектом радиоволн.
2. Для получения необходимой информации учитываются и используются реальные закономерности распространения радиоволн в пространстве.
3. Выделение слабых сигналов, приходящих от объектов, и разрешение объектов обеспечивается за счет различий сигналов и помех, а также сигналов от разных объектов между собой.
4. Информация об объектах получается параллельно или последовательно во времени и выдается в виде информационных потоков.
Далее рассмотрим более подробно перечисленное выше.
К видам излучения относятся: вторичное излучение, переизлучение и собственное излучение радиоволн. В первых двух случаях радиолокатор излучает в направлении на объект мощный сигнал (зондирующий сигнал); в последнем случае облучения объекта не требуется. Радиолокация с использованием вторичного излучения и переизлучения называется активной, а радиолокация с использованием собственного излучения - пассивной.
Радиолокация с пассивным ответом основана на том, что радиолокационная станция (РЛС) излучает электромагнитные колебания, которые отражаются от объекта и попадают в приемник в виде отраженного сигнала. Важным требованием к объектам в этом случае является отличие их отражающих свойств от отражающих свойств окружающей среды. Явление вторичного излучения позволяет обнаружить объекты, не являющиеся источниками собственных радиоизлучений или переизлучений (рис. 1.1, а).

Радиолокация с активным ответом (рис. 1.1, б), именуемая иногда как вторичная радиолокация (в первом случае радиолокация первичная), характеризуется тем, что ответный сигнал является не отраженным, а переизлученным с помощью специальных средств (ответчики - ретрансляторы). При этом значительно повышается дальность и контрастность радиолокационного наблюдения, улучшается помехоустойчивость. Данный метод широко применяется для определения государственной принадлежности воздушных судов (с помощью специальных кодов). В гражданской авиации метод активного ответа используется весьма широко, так как с его помощью можно получить много дополнительной полетной информации (номер борта, высота полета и др.).
Системы активной радиолокации могут быть совмещенными и разнесенными. В совмещенном радиолокаторе передающее и приемное устройство располагаются совместно, при этом возможно поочередное использование одной и той же антенны на передачу и прием.
В разнесенной системе передающее и приемное устройства располагаются на определенном удалении друг от друга.
Пассивная радиолокация основана на приеме собственного радиоизлучения объектов (рис. 1.1, в). Электромагнитные колебания создаются элементами объекта: его нагретыми частями (тепловое излучение в диапазоне инфракрасных или миллиметровых волн), радиотехническими устройствами связи, навигации, локации, радиопротиводействия, а также колеблющимися частицами ионизированных участков атмосферы в окрестности объекта. Прием может осуществляться одним или несколькими разнесенными приемными устройствами.
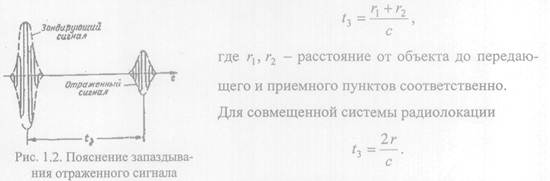
При определении координат воздушных объектов в любой радиолокационной системе используются определенные закономерности распространения радиоволн. Ограничимся случаем распространения радиоволн в свободном пространстве, которое является однородным, изотропным и недиспергирующим. Для всех точек такого пространства скорость распространения радиоволн одинакова, не зависит от поляризации волны и частоты колебаний (c=3*108 м/сек). При этом зондирующий и отраженный сигналы распространяются по прямолинейной траектории и без искажения своей формы. Время запаздывания Г3 отраженного сигнала относительно зондирующего (рис. 1.2) для разнесенной системы определяется соотношением
Концентрация излучаемой энергии в каком-то одном направлении и направленный прием обеспечивают существенное увеличение дальности радиолокации. Появляется возможность измерять угловые координаты воздушных объектов - азимут и угол места, например, по максимуму отраженного сигнала, а также разрешать объекты по угловым координатам (рис. 1.3).

Ширина диаграммы направленности антенны радиолокатора определяется соотношением ее геометрических размеров к длине волны. Поэтому высокие направленные свойства обеспечиваются за счет увеличения размеров антенны и использования дециметрового, сантиметрового и миллиметрового диапазона волн.
Даже при остронаправленном облучении объекта от его поверхности отражается незначительная часть излучаемой энергии. Еще в большей степени рассеяние энергии проявляется на пути от объекта до приемной антенны в силу слабой направленности вторичного излучения. Приходящие сигналы, особенно на больших дальностях, оказываются слабыми и необходимо принимать меры для их выделения на фоне помех и шумов. К числу таких мер относятся: увеличение средней мощности сигналов передатчиков, габаритов антенн, применение малошумящих приемников. Должна предусматриваться такая обработка смеси слабых сигналов и помех, при которой обеспечивается наилучшее использование взаимных различий сигнала и помех.
Большинство современных радиолокаторов формируют поток информации об объектах в участке пространства, содержащем большое число разрешаемых объемов. При этом могут использоваться принципы последовательного, параллельного или параллельно-последовательного составления потока информации.
Принцип последовательного обнаружения объектов радиолокатором с лучом игольчатого типа наглядно изображен на рис. 1.4. Закон перемещения луча может быть различным, например, по спирали.

Путем создания пучка игольчатых лучей (рис. 1.5) реализуется принцип параллельного получения нескольких потоков информации. Каждому из лучей необходим свой приемник.
Если по одной из угловых координат (углу места) поток информации получается параллельно, а по другой (азимуту) - последовательно, имеет место параллельно-последовательное составление потока информации.
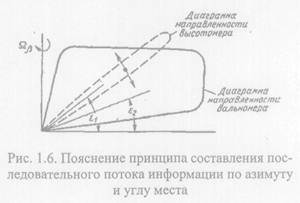
Последовательные, параллельные и параллельно-последовательные потоки информации могут быть образованы также с помощью двух и более разделенных радиолокаторов. Например, радиодальномеры с диаграммой, изображенной на рис. 1.6 сплошной линией, образуют последовательный поток информации об азимуте объектов. Специальные радиолокаторы (высотомеры) с узкой диаграммой направленности в вертикальной плоскости (пунктир на рис. 1.6) производят последовательный обзор по углу места и определяют высоту объектов на тех азимутах, где они обнаружены дальномером.
Для объединение и обработки информации нескольких радиолокаторов могут создаваться радиолокационные узлы (рис. 1.7). Несколько радиолокационных узлов, обменивающихся информацией, образуют радиолокационную систему (рис. 1.8).

Средства радиолокации широко используются для решения задач радионавигации, связанных с определением местоположения воздушных судов и других движущихся объектов. На рис. 1.9 изображено местоположение объекта Ц в пространстве, которое может быть отображено в сферической системе координат (D, β, ε) либо в цилиндрической системе координат (Dг,β, Н).

На рисунке обозначено: D - наклонная дальность (или просто дальность); Dp -горизонтальная дальность; ft - азимут (угол между направлением на север и проекцией направления на объект в горизонтальной плоскости, отсчитываемой по часовой стрелке); £ - угол места (угол между проекцией направления на объект в горизонтальной плоскости и направлением на объект); Н - высота объекта.
Для радиолокации характерно, что весь процесс определения координат производится из одной точки (на рисунке точка О). Исключение составляют разнесенные радиолокационные системы. Непосредственно определяемыми координатами являются D, Д е. При этом можно считать, что объект Ц расположен в точке пересечения трех поверхностей: сферы радиусом D и двух плоскостей (вертикальной, проходящей через точку Ц и наклонной, расположенной под углом s к горизонту). Эти поверхности являются геометрическим местом точек пространства, в которых данный измеряемый параметр постоянен, и называются поверхностями положения. В навигации используются следующие методы определения местоположения объектов: дальномерный, основанный на измерении дальностей от двух различных точек (линия положения - окружности); угломерный (пеленгационный), когда пеленгаторы, расположенные в различных точках, определяют направления (линии положения - прямые); дальномерно-угломерный; разностно-дальномерный, когда измеряется разность расстояний от двух точек (линии положения - гиперболы) и др.
1.2. Пространственно-временная обработка
Радиолокационная информация об объектах содержится в пространственно-временном сигнале (ПВС), отраженном или излученном объектами. Радиолокационная информация извлекается из ПВС путем его пространственно-временной обработки, отражающей две формы существования поля. Векторное электромагнитное поле (в отличие от скалярного) характеризуется пространственно-временной и поляризационной структурой, поэтому пространственно-временная обработка сигнала включает три компоненты: временную, пространственную и поляризационную.
Следует различать принципы, способы, схемотехнику и язык описания пространственно-временной обработки сигнала.
Принципыпространственно-временной обработки сигнала сводятся к совокупности следующих трех доказанных ранее положений.
Во-первых, пространственно-временная обработка сигнала делится на два этапа: этап подавления помехи и этап выделения сигнала.
Во-вторых, подавление помехи осуществляется путем пространственно-временного дифференцирования или спектральной режекции по всему пространству наблюдения.
В-третьих, выделение сигнала осуществляется путем когерентного пространственно-временного интегрирования или спектральной фильтрации на определенном интервале пространства наблюдения и последующего некогерентного пространственно-временного интегрирования на оставшемся интервале пространства наблюдения.
Способы пространственно-временной обработки сигнала: корреляционный и фильтровой (возможно их сочетание). Корреляционный способ обработки предполагает наличие опорного сигнала (прообраза принятого), перемножение опорного и принятого сигналов и интегрирование (по каждому элементу разрешения пространства наблюдения). Фильтровой способ обработки предполагает наличие одного пространственно-временного фильтра, импульсная характеристика которого согласована с пространственно-временной структурой сигнала и который обладает многомерной инвариантностью (в общем случае - ко времени запаздывания, угловому положению цели и доплеровскому смещению частоты). Оба способа обработки приводят к формированию корреляционного интеграла, модульное значение которого однозначно связано с отношением правдоподобия. Многоканальность в сочетании с простотой каждого канала при корреляционной обработке и сложность одного (единственного) пространственно-временного фильтра с многомерной инвариантностью при фильтровой обработке - главные привлекательные и отпугивающие характеристики этих способов.
Схемотехника, используемая для реализации корреляционного и фильтрового способов обработки сигнала, может быть аналоговой, цифровой и оптической.
Существует 2 языкаописания пространственно-временного сигнала и пространственно-временной обработки - пространственно-временной и спектральный. Пространственно-временной язык адекватно отражает две формы существования материального мира с привычными пространственно-временными координатами х, у, z, ?, состоящего из вещества и поля, в котором мы живем. Спектральный язык, в основе которого лежит преобразование Фурье пространственно-временного процесса, описывает процессы, явления и свойства материального мира в мерности другого - спектрального пространства с координатами со*, (£>у, coz, со, являющимися пространственными и временной частотами. Спектральный язык - это искусственный язык, нашедший в силу ряда удобств широкое распространение, особенно в радиотехнике, оптике, акустике.
Например, сформулированные выше принципы пространственно-временной обработки сигнала изложены на двух языках. Так, принцип подавления помехи на пространственно-временном языке сформулирован как пространственно-временное дифференцирование, а на спектральном - как спектральная режекция. Принцип выделения сигнала на пространственно-временном языке сформулирован как пространственно-временное интегрирование, а на спектральном - как спектральная фильтрация.
Пространственно-временная обработка принятого сигнала является основой решения всех задач радиолокационного наблюдения: обнаружения, распознавания, измерения, а, следовательно, основой получения всей радиолокационной информации (о наличии или отсутствии цели, о классе или типе цели, о координатах и параметрах движения цели). Действительно, сформировав отношение правдоподобия или любую иную величину, однозначно с ним связанную, и испытав их на порог, можно принять решения о наличии или отсутствии цели по всем элементам разрешения пространства наблюдения с показателями качества F и D гарантирующими минимальный средний риск, т.е. решить задачу обнаружения.
Аналогичным образом сформировав в результате пространственно-временной обработки сигнала отношение правдоподобия по каждому элементу пространства распознавания и обеспечив тем самым получение радиолокационного портрета целей как распределения комплексных амплитуд принятого сигнала по всем элементам пространства распознавания, осуществив в дальнейшем М-канальную обработку портретов в соответствии с заложенными в эти каналы априорными сведениями об М классах распознаваемых целей, сравнив результаты обработки и выбрав большее, можно принять решение о классе распознаваемой цели с показателями качества DK, FK, гарантирующими минимальный средний риск решения в условиях многоальтернативного выбора, т.е. решить задачу распознавания. И, наконец, сформировав отношение правдоподобия и подобрав тем или иным способом такое значение измеряемого параметра, при котором отношение правдоподобия максимально, можно измерить координату или параметр движения цели с минимальной ошибкой, т.е. решить задачу измерения.
Таким образом, осуществляя полную пространственно-временную обработку принятого сигнала и решая на этой основе задачи обнаружения, измерения, распознавания, можно получить необходимую радиолокационную информацию о целях.
1.3. Пространственно-временная обработка радиолокационной информации
Обработка радиолокационной информации предполагает объединение не на уровне сигналов, а на уровне первичной информации, т.е. единичных решении о наличии и классе целей и единичных (разовых) оценок координат и параметров движения целей.
Пространственно-временная обработка включает: первичную обработку сигнала, вторичную и третичную обработку информации.
Под первичной обработкойподразумевается обработка принятого сигнала в одном пункте приема за один радиолокационный контакт с целью. Таким образом, такая обработка ограничена по пространству и по времени. Пространство ограничено размерами антенной системы (единицы метров), а время - временем наблюдения (единицы - десятки миллисекунд). При этом с определенным качеством (вероятностями правильных и ложных решений, ошибками измерения) могут решаться все задачи радиолокационного наблюдения (обнаружение, измерение, распознавание). Такую обработку сигнала принято называть первичной, а извлекаемую из принятого сигнала в результате ограниченной по пространству и времени обработки информацию - первичной радиолокационной информацией, подразумевая под ней единичные решения о наличии или отсутствии целей, о классе целей, единичные оценки-замеры координат или параметров движения целей.
Как правило, в каждом пункте наблюдения к цели обращаются не один раз, а многократно. Если первичную информацию о целях объединить во времени за несколько циклов обращения к цели, то качество радиолокационной информации улучшится. Процесс объединения во времени первичной радиолокационной информации принято называть вторичной обработкой радиолокационной информации.В результате объединения во времени единичных решений о наличии или отсутствии цели в том или ином элементе разрешения пространства наблюдения улучшаются характеристики обнаружения, а в результате объединения во времени единичных решений о классе цели улучшаются характеристики распознавания. Объединением во времени единичных оценок-замеров координат и параметров движения цели уменьшаются ошибки измерения. Вторичная обработка позволяет уменьшить влияние естественных и искусственных помех, расширить объем получаемой информации путем вычисления скорости и курса объектов или его траектории. Способы объединения во времени первичной информации и его характеристики составляют содержание проблемы вторичной обработки радиолокационной информации.
Если радиолокационная система состоит из нескольких пунктов наблюдения (приема), то первичную информацию о целях можно объединить не только по времени, но и по пространству. При этом качество радиолокационной информации улучшится. Процесс объединения по пространству первичной (или вторичной) информации о целях принято называть третичной обработкой радиолокационной информации.Третичная обработка тоже приводит к улучшению характеристик обнаружения, распознавания и измерения.
Следует отметить, что первичная обработка сигнала (из одного пункта за время наблюдения) в сочетании с вторичной и третичной обработкой информации не эквивалентна полной пространственно-временной обработке сигнала. Дело в том, что вторичная и третичная обработка первичной РЛИ заранее предопределяет некогерентное пространственно-временное объединение результатов первичной обработки. Типичными примерами такого объединения являются АСУ воздушным движением ГА, основу которых составляют группировки некогерентных по времени и по пространству РЛС.
Однако в общем случае при многопозиционном построении радиолокационной системы с взаимной привязкой (позиций) не только по времени, но и по частоте и по фазе результаты первичной обработки сигналов, разделенные по времени и пространству, могут иметь корреляционные связи, которые должны быть использованы при полной пространственно-временной обработке сигнала.
На рис. 1.10 изображена классификация пространственно-временной обработки информации.

1.4. Физический смысл пространственно-временной обработки сигналов на фоне помех в адаптивных антенных решетках
Реализация адаптивных методов в радиолокации стала возможной в связи с появлением и интенсивным развитием антенных решеток. Чтобы правильно понимать и оценивать возможности таких адаптивных РЛС, необходимо рассмотреть особенности обработки сигналов в антенных решетках и формирование ими диаграмм направленности.
На рис. 1.11, а изображена диаграмма направленности (ДН) решетки, содержащей 8 элементов в полярных координатах. Она формируется в результате весового суммирования напряжений отдельных элементов решетки на частоте  . Если теперь обеспечить задержку во времени выходных сигналов от отдельных элементов, как это показано на рис. 1.11, б, то в результате главный лепесток ДН повернется на угол
. Если теперь обеспечить задержку во времени выходных сигналов от отдельных элементов, как это показано на рис. 1.11, б, то в результате главный лепесток ДН повернется на угол  , где с—скорость распространения сигналов в среде, d — расстояние между элементами антенной решетки,
, где с—скорость распространения сигналов в среде, d — расстояние между элементами антенной решетки,
 — относительный сдвиг фазы между соседними элементами решетки.
— относительный сдвиг фазы между соседними элементами решетки.

Рис. 1.11. Диаграммы направленности 8-элементной антенной решетки:
а — исходная, б — для приема сигналов при отклонении ДН от нормали к плоскости решетки
Изменяя величины задержки выходных сигналов во времени от отдельных элементов, можно обеспечить электрическое управление главным лепестком ДН в заданном угловом секторе.
Отношение сигнал-шум на выходе антенной решетки уменьшается при попадании на ее элементы мешающих сигналов по главному и боковым лепесткам. Отношение сигнал-шум падает также из-за изменения пространственных положений источников помех во времени, неудачного расположения антенной системы, а также из-за движения луча. Сказанное иллюстрирует рис. 1.12, а, где показана та же антенная решетка, что и на

|
 Помехи
Помехи
Помела
Рис. 1.12. Диаграмма направленности 8-элементной антенной решетки при воздействии
одного источника помехи:
а — исходная, б — с нулем, сформированным в направлении на источник помехи
рис. 1.11, а, но с направления, указанного пунктиром поступает помеховый сигнал с частотой . Он принимается по одному из боковых лепестков ДН. И если его мощность достаточно велика, то мощность помех на выходе решетки может оказаться сравнимой или даже существенно больше мощности полезного сигнала. Это может привести к потере работоспособности РЛС с такой антенной системой, если не будут приняты специальные меры. Они могут заключаться в том, например, чтобы выставить весовые коэффициенты решетки так, как указано на рис. 1.12, б. При этом ДН решетки на частотеизменится следующим образом. Боковой лепесток, максимум которого ранее совпадал с направлением на источник помехи, сместится так, что направление нулевого приема совпадет с направлением на источник помехи. Главный лепесток ДН изменится при этом незначительно. Таким образом, будет существенно снижена чувствительность решетки по отношению к сигналу и помехе. Можно подобрать значения весовых коэффициентов решетки так, чтобы образовать зоны нулевого приема в направлениях на несколько источников помех. Но для этого необходимо заранее знать их угловые положения. В реальных условиях такой информации обычно нет, поэтому стремятся построить адаптивные системы, которые автоматически выставляют нули в направлениях воздействия источников помех. Прежде чем перейти к описанию такого рода систем, которые получили название адаптивных антенных решеток, кратко рассмотрим их различные схемы построения. По своей структуре все адаптивные антенные решетки представляют собой весовые сумматоры (рис. 1.13). В фильтре, предназначенном для обработки узкополосных процессов (рис. 1.13, а), каждый элемент решетки соединен с переменным весовым умножителем и с фазовращателем (на 90°). К его выходу подключен второй умножитель. Сигналы с выходов умножителей суммируются. Такая решетка обеспечивает линейную обработку узкополосных процессов. Если необходимо обрабатывать помехи и сигналы в широком диапазоне частот, то все фазовращатели необходимо заменить линиями задержки с отводами.

а) 0
Рис. 1.13. Виды адаптивных антенных решеток без цепей автоподстройки весовых коэффициентов для приема узкополосных сигналов (а) и для приема широкополосных сигналов или не разделяющейся обработки (б)
К каждому отводу подключается свой весовой умножитель. Если расстояние между отводами достаточно мало, то такая схема приближается к идеальному фильтру, который мог бы обеспечить управление фазой и величиной сигнала на каждой из частот заданного диапазона. Сигналы с выходов весовых умножителей суммируются для получения выходного напряжения решетки. Этот вариант схемы решетки представлен на рис. 1.13, б. В такой системе удается сформировать нули ДН в направлениях на источники помех на каждой из частот заданного диапазона.
– Конец работы –
Эта тема принадлежит разделу:
Теоретические основы радиолокации
Красноярский Государственный Технический Университет...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Радиолокационной информации
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.019 сек.
Новости и инфо для студентов