рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Обнаружение радиолокационных сигналов
Реферат Курсовая Конспект
Обнаружение радиолокационных сигналов
Обнаружение радиолокационных сигналов - раздел Образование, Теоретические основы радиолокации 2.1.1. Качественные Показатели И Критерии Оптимального Обнаружения Сигнало...
2.1.1. Качественные показатели и критерии оптимального обнаружения сигналов
Первая задача радиолокационного приема - задача обнаружения сигнала. В результате процесса обнаружения должно быть выдано решение о наличии или отсутствии цели в, произвольном разрешаемом объеме зоны обнаружения . средства радиолокации (СРЛ). Решение может быть принято при двух взаимно исключающих условиях:
условие А - «объект есть»,
- «объект есть»,
условие Ао - «объекта нет», которые в процессе получения решения неизвестны.
За счет помех и флюктуации полезного сигнала каждому условию могут соответствовать два вида решений:
решение А * — «объект есть»,
* — «объект есть»,
решение A* - «объекта нет»,
При обнаружении возможны четыре ситуации совмещения случайных событий «условия» и «решения»:
1) ситуация А*А(правильное обнаружение);
2) ситуация A*A(пропуск цели);
3) ситуация А*А0 (ложная тревога);
4) ситуация А *А0 (правильное не обнаружение)
*А0 (правильное не обнаружение)
Перечисленным ситуациям соответствуют четыре вероятности совмещения событий: Р(А*А), Р(A*A), Р(А*А0), Р(А*А0). Каждому ошибочному решению ставится в соответствие некоторая плата — стоимость ошибки  . Для безошибочных решений эта стоимость равна
. Для безошибочных решений эта стоимость равна
0  . Средняя стоимость (математическое ожидание стоимости) ошибочных решений определится следующим образом:
. Средняя стоимость (математическое ожидание стоимости) ошибочных решений определится следующим образом:
 (1)
(1)
Лучшей системой обработки считается та, которая удовлетворяет критерию минимума этой стоимости - критерию минимума среднего риска. На практике переходят к условным вероятностям, являющимся качественными показателями обнаружения при условиях наличия и отсутствия объекта радиолокации.
Качественными показателями обнаружения при условии наличия объекта являются соответствующие условные вероятности правильного обнаружения
 (2)
(2)
и пропуска цели
 (3)
(3)
Поскольку соответствующие одному и тому же условию  решения
решения  и
и  взаимоисключающие, то
взаимоисключающие, то

Качественными показателями обнаружения при условии отсутствия объекта являются условные вероятности ложной тревоги
 (4)
(4)
и правильного обнаружения
 (5)
(5)
причем 
Используя приведенные соотношения (2) - (5), выражение (1) для средней стоимости ошибки можно представить в следующем виде

или после замены D-1-D и простых преобразований,
 , (6)
, (6)
где 
При этом критерий оптимизации обнаружения по минимуму среднего риска сводится к весовому критерию
I = D-l0F = max. (7)
Последний показывает, что по совокупности требований повышения условной вероятности правильного обнаружения D и понижения условной вероятности ложной тревоги F следует стремиться к увеличению «взвешенной» разности D- l0F. Множитель l0, называемый весовым множителем, зависит от
соотношения стоимостей ошибок каждого вида и вероятностей наличия или отсутствия объектов в исследуемом участке пространства. Дать рекомендации по выбору D и F затруднительно. Допустимые значения условных вероятностей правильного обнаружения и ложной тревоги обычно устанавливают из практических соображений.
Оптимизация обнаружителей может достигаться одновременным уменьшением условных вероятностей ложной тревоги и пропуска цели. В таких обнаружителях оба вида ошибок нежелательны в одной и той же степени. Поэтому полагают  и средний риск приобретет смысл суммарной вероятности ошибки (Рош)
и средний риск приобретет смысл суммарной вероятности ошибки (Рош)
| Условие минимума этой вероятности (Рош = min) носит название критерия идеального наблюдателя. Ложная тревога является опасным явлением, ибо может вызвать крайне нежелательные, а порой и необратимые, последствия. Увеличение вероятности ложной тревоги не может быть допущено даже за счет снижения вероятности пропуска сигнала. Если обнаружитель максимизирует разность D- l0F, то фиксация F влечет за собой максимизацию вероятности правильного обнаружения D. Следовательно, оптимальный обнаружитель обеспечивает наибольшую, среди всех обнаружителей, вероятность правильного обнаружения D и |
 .
.
Фиксированном значении вероятности ложной тревоги F. Это является основой критерия Наймана – Пирсона.
Обычно значения априорных вероятностей Р(А0) и Р(А1) заранее неизвестны. Наибольшую информативность, в этом случае, обеспечивает равенство этих вероятностей Р(А0) = Р(А1) = 0,5. Тогда вероятность суммарной ошибки
 .
.
Условие минимума вероятности ошибочного решения

носит название критерия максимального правдоподобия.
В радиолокации наибольшее применение находит критерий Неймана -Пирсона. При этом основными качественными показателями радиолокационного обнаружения являются условные вероятности правильного обнаружения D и ложной тревоги F.
2.1.2. Оптимизация обнаружения
Обнаружитель сигнала решает задачу выяснения следующего: содержит принимаемое колебание отраженный сигнал или нет. На вход обнаружителя поступает колебание у, которое при отсутствии сигнала представляет собой шум п, а при наличии сигнала - сумму шума и сигнала (п+х). В общем случае входной сигнал можно записать в такой форме
у = п + Ах ,
где неизвестный дискретный параметр А принимает значение 0 или 1. Таким образом, задача сводится к тому, чтобы по измеренной величине у дать оценку этого параметра А*, оптимальную с точки зрения критерия минимума среднего риска или эквивалентного ему весового критерия.
Полагаем, что величины х, у и п за время наблюдения не меняются. Ожидаемое значение сигнала х точно известно. Закон распределения случайной величины п также известен (будем полагать его нормальным). На рис. 2.1 изображены графики плотностей вероятности случайной величины у при условиях отсутствия сигнала А=А0 =0 и его наличия A=A1=1:

 ,
,
 .
.
Индексы «П» и «СП» указывают на наличие одной помехи или наличии сигнала с помехой. Кривая РСП (у) сдвинута по отношению к кривой РП (у) на постоянную величину х.
Рис. 2.1. Условные плотности вероятности РП (у) и РСП (у) и график решающей функции А*(у)
Любое закономерное решение задачи обнаружения может быть описано решающей функцией А* = А*(у), которая в зависимости от реализации у принимает одно из двух значений: 0 или 1. Из графика решающей функции следует, что для y0<y<y1 принимается решение о наличии сигнала. Условные вероятности D и F имеют смысл вероятностей попадания случайной величины у в интервал  при условии «сигнал + помеха» или «помеха» и соответствуют заштрихованным областям на рисунке. Для произвольной решающей функции выражения для D и F можно записать в виде интегралов в бесконечных пределах
при условии «сигнал + помеха» или «помеха» и соответствуют заштрихованным областям на рисунке. Для произвольной решающей функции выражения для D и F можно записать в виде интегралов в бесконечных пределах
 (8)
(8)
Выражение D- l0F, соответствующее весовому критерию, может быть представлено следующим образом
 (9)
(9)
где  (10)
(10)
Согласно весовому критерию оптимальной является такая система обнаружения, которая обеспечивает максимум интеграла (9). Чтобы выполнить это условие, достаточно добиться для каждого у наибольшего значения подынтегрального выражения за счет выбора решающей функции А*(у). Эта функция
принимает только два значения: 0 или 1, так что подынтегральное выражение либо обращается в 0, либо умножается на 1. Поэтому полагаем:
1) А*(у)=1, если подынтегральное выражение положительное;
2) А*(у)=0 в противном случае.
Поскольку плотность вероятности РП (у) не может принимать отрицательных значений, то оптимальное правило решения задачи обнаружения может быть записано в виде
 (11)
(11)
Величина  называется отношением правдоподобия. Оно характеризует, какую из гипотез следует считать правдоподобной. Отношение правдоподобия не может выражаться отрицательным числом. Решение о наличии сигнала принимается, если отношение правдоподобия превышает пороговую величину l0, в противном случае принимается решение об отсутствии сигнала.
называется отношением правдоподобия. Оно характеризует, какую из гипотез следует считать правдоподобной. Отношение правдоподобия не может выражаться отрицательным числом. Решение о наличии сигнала принимается, если отношение правдоподобия превышает пороговую величину l0, в противном случае принимается решение об отсутствии сигнала.
В случае, если помеха описывается центральным гауссовым распределением со стандартным отклонением n0 и дисперсией  , отношение правдоподобия будет равно
, отношение правдоподобия будет равно
 (12)
(12)
Зависимость l(y) для х > 0 изображена на рис. 2.2.
При х>0 
Величина у0 называется порогом. При заданном уровне помех условная вероятность ложной тревоги F зависит только от величины у0:
 , (13)
, (13)
где  - интеграл вероятности.
- интеграл вероятности.
Таким образом, величину порога можно выбирать непосредственно по заданному уровню вероятности ложной тревоги, что соответствует критерию Неймана-Пирсона.

|

|
Рис. 2.2. Зависимость отно- Рис. 2.3. Условие плотности веро-
шения правдоподобия от ре- ятности Рп (у), РСП (у) и график ре
зультатов наблюдения шающей функции А*опт (у)
Условная вероятность правильного обнаружения определится следую-
щим образом:
 (14)
(14)
При заданном уровне помех n0 величина D зависит не только от порога у0, но и от величины ожидаемого сигнала (рис. 2.4). Зависимость D(x) может быть построена качественно из анализа площади под кривой РСП (у) на рис. 2.3 и количественно в соответствии с выражением (14). Чем выше уровень порога у0
и меньше условная вероятность ложной тревоги F, тем больше кривая D(x)
сдвигается вправо.

|
При этом для обеспечения той же вероятности D требуется больший уровень полезного сигнала. Кривые, изображенные на рис. 2.4 называются кривыми обнаружения.
Рис. 2.4. Кривые обнаружения
2.1.3. оптимальное обнаружение полностью известного сигнала
Будем полагать, что ожидаемый сигнал x(t, а) полностью известен, т.е. известны его форма, амплитуда, временное положение и т.д. Обнаружитель должен выработать решение о наличии или отсутствии сигнала. На вход обнаружителя поступает сигнал y(t), который обнаруживается на фоне белого гауссов- ского шума n(t).

Отношение правдоподобия для этого случая может быть представлено в следующем виде
 , (15)
, (15)
где  - фиксируемый при обнаружении параметр или совокупность параметров ожидаемого сигнала;
- фиксируемый при обнаружении параметр или совокупность параметров ожидаемого сигнала;
N0 — спектральная плотность шума; Э() - энергия ожидаемого игнала; Z() - корреляционный интеграл
 . (16)
. (16)
Отношение правдоподобия является монотонной функцией корреляционного интеграла, который может быть рассчитан по принятой реализации y(t) для любого фиксированного параметра . Сравнение отношения правдоподобия с порогом l0 эквивалентно сравнению корреляционного интеграла с соответствующим порогом z0.
 .
.
Таким образом, оптимальный обнаружитель должен вычислять корреляционный интеграл (16) и сравнивать его с порогом. Структурная схема простейшего обнаружителя сигнала с полностью известными параметрами изображена на рис. 2.5.
Величина корреляционного интеграла сравнивается с порогом z0. Уровень порога подбирается так, чтобы вероятность F ложного превышения порога

Рис. 2.5. Простейший корреляционный обнаружитель
была не больше допустимой. Опорное колебание x(t,) может вырабатываться специальным гетеродином или получаться непосредственно от передатчика путем задержки сигнала на время .
2.1.4. Оптимальное обнаружение сигнала со случайной начальной фазой
Обычно сигнал, принимаемый приемником, неизвестен точно. Как правило, его амплитуда, начальная фаза, время запаздывания и другие параметры заранее неизвестны. Возможны два способа приема сигналов с неизвестными параметрами. Первый способ предполагает предварительное измерение всех его неизвестных параметров и последующий прием как полностью известного сигнала. Этот способ требует выделения специального времени на выполнение указанных выше измерений, усложнения аппаратуры и значительной величины отношения сигнал-шум. Этот способ может быть заменен другим, при котором неизвестные параметры сигнала считаются случайными, а его прием ведется без учета конкретных значений параметров путем статистического усреднения принятого колебания.
Методика определения отношения правдоподобия для сигналов со случайными нефиксированными параметрами по принятой реализации y(t) сводится:
1) к вычислению корреляционного интеграла, энергии ожидаемого сигнала и
частного отношения правдоподобия при фиксированных параметрах и  (—
(—
случайный нефиксированный при обнаружении параметр или совокупность па-
раметров: начальная фаза, амплитуда);
2) к усреднению частного отношения правдоподобия по случайному нефикси
рованному параметру .
Для указанной выше ситуации частное отношение правдоподобия определится следующим образом:
 , (17)
, (17)
где Z и Э- частные значения корреляционного интеграла и нергии сигнала.
и Э- частные значения корреляционного интеграла и нергии сигнала.
 (18)
(18)
 . (17)
. (17)
Ведя речь о фазовой структуре сигналов, следует определиться с когерентностью. Когерентными называют сигналы с закономерной фазовой структурой, однако начальная фаза радиолокационного сигнала обычно является неизвестной случайной величиной. Такой сигнал может быть представлен в виде:
 , (20)
, (20)
где  .
.
sin
Тогда частное значение корреляционного интеграла (18) приводится к виду:
 ,
,
где  ,
,
 ,
,

Для сигнала, содержащего большое число периодов колебаний, частное значение энергии от не зависит  .
.
Учитывая, что все случайные начальные фазы равновозможны, полагаем их распределение равномерным в пределах от 0 до 2 с плотностью вероятности
с плотностью вероятности  . Определяя математическое ожидание частного отношения правдоподобия и вводя модифицированную функцию Бесселя первого рода нулевого порядка
. Определяя математическое ожидание частного отношения правдоподобия и вводя модифицированную функцию Бесселя первого рода нулевого порядка  , получим
, получим
 (20)
(20)
где Z - модульное значение корреляционного интеграла, определяемое для принятой реализации y(t) с учетом фиксированного параметра а
- модульное значение корреляционного интеграла, определяемое для принятой реализации y(t) с учетом фиксированного параметра а
 (22)
(22)
Таким образом, для сигнала с неизвестной начальной фазой отношение правдоподобия является монотонной функцией модульного значения корреляционного интеграла. Структурная схема оптимального обнаружителя сигнала со случайной начальной фазой изображена на рис. 2.6.

Рис. 2.6. Структурная схема оптимального обнаружителя сигнала со случайной фазой
Характеристики обнаружения сигнала со случайной начальной фазой имеют тот же вид, что и при точно известном сигнале, но лежат несколько правее, что свидетельствует о проигрыше в отношении сигнал—шум.
Если реализуется прием одиночного сигнала со случайной начальной фазой, простейшая схема оптимального обнаружителя имеет вид, изображенный на рис. 2.7.

Рис. 2.7. Оптимальный приемник для обнаружения сигнала с неизвестной начальной фазой
Согласованный фильтр такой, у которого коэффициент передачи K есть величина, комплексно сопряженная спектру Sсигнала. Импульсная переходная характеристика согласованного фильтра с точностью до постоянного множителя является зеркальным отражением входного сигнала на оси времени. Такой фильтр обеспечивает максимальное отношение сигнал-шум.
есть величина, комплексно сопряженная спектру Sсигнала. Импульсная переходная характеристика согласованного фильтра с точностью до постоянного множителя является зеркальным отражением входного сигнала на оси времени. Такой фильтр обеспечивает максимальное отношение сигнал-шум.
Если принимается последовательность импульсных сигналов со случайной начальной фазой, то выбор схемы обнаружителя существенно зависит от взаимосвязи фаз отдельных сигналов. При когерентной пачке импульсных сигналов (имеет место функциональная зависимость фазы колебаний от времени) оптимальный приемник может быть реализован в соответствии со структурной схемой, изображенной на рис. 2.8.

Рис. 2.8. Оптимальный приемник для обнаружения пачки когерентных импульсов одинаковой амплитуды и длительности
Согласованный фильтр в данной схеме является оптимальным для отдельного импульса пачки. Линия задержки имеет (N-1) отводов (N — число импульсов в пачке). Если период следования импульсов Т, то общая задержка в линии равна (N-l)-T. В момент окончания пачки импульсов на выходе сумматора имеет место наибольшее значение отношения сигнал-шум, характеризуемое суммарной энергией пачки импульсов.
Для некогерентной пачки импульсов (начальные фазы отдельных импульсов статистически независимы) оптимальный приемник принимает вид, изображенный на рис. 2.9.
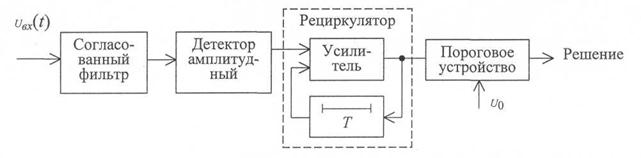
Рис. 2.9. Оптимальный приемник для обнаружения пачки одинаковых некогерентных импульсов
Приемник включает: фильтр, согласованный с одиночным импульсным сигналом; детектор амплитудный; рециркулятор, используемый для накопления видеоимпульсов; пороговое устройство. Рециркулятор имеет коэффициент передачи меньше единицы, вследствие чего накопление импульсов происходит неоптимальным образом и поэтому схема на рис. 2.9 является квазиоптимальной.
В момент окончания пачки импульсов отношение сигнал-шум на выходе рециркулятора имеет максимальное значение. Суммирование импульсных сигналов происходит после нелинейного элемента - детектора амплитудного, который ухудшает отношение сигнал-шум на выходе по сравнению с этим отношением до детектора. Вследствие этого, результирующее отношение сигнал-шум некогерентной пачки импульсов оказывается меньшим, чем у когерентной.
2.1.5. Оптимальное обнаружение сигнала со случайными амплитудой и начальной фазой
Часто случайной бывает не только начальная фаза, но и амплитуда, что приводит к дальнейшему ухудшению характеристик обнаружения по сравнению с полностью известным сигналом. Для этого случая сигнал может быть записан следующим образом:
 .
.
Для такого сигнала частное отношение правдоподобия при фиксированном В будет равно
где Z(b) = BZ, Э(B) = В2Э; Э и Z - энергия и модульное значение корреляционного интеграла, рассчитанные по ожидаемому сигналу, соответствую-
щему В=1.
При этом величина Э выбирается равной средней энергии
 .
.
Задаваясь релеевским распределением амплитуд

окончательно получим:
 (23)
(23)
Для сигнала с неизвестными амплитудой и начальной фазой отношение правдоподобия является монотонной функцией модульного значения корреляционного интеграла Z(), как и в случае, когда неизвестна только начальная фаза. Совпадение алгоритмов обнаружения позволяет использовать в обоих случаях одинаковые схемы обработки.
Особенность характеристик обнаружения в рассматриваемом случае состоит в том, что с ростом отношения сигнал-шум вероятность обнаружения возрастает сначала быстро, а после достижения значений D = 0,5 - 0,6 это увеличение замедляется, а затем становится очень медленным. Это объясняется тем, что при действии таких сигналов изменяются лишь параметры распределения Релея величины Z в оптимальном обнаружителе.
На рисунке 2.10 изображены кривые обнаружения для различных сигналов.

Рис. 2.10. Кривые обнаружения для сигналов: с полностью известными параметрами (штрих-пунктир), со случайной начальной фазой (пунктир), со случайными амплитудой и начальной фазой (сплошные линии)
Приведенные выше схемы являются оптимальными лишь тогда, когда положение ожидаемого сигнала на оси времени известно. Ответ о наличии сигнала с неизвестным временем запаздывания может быть дан, если установить факт его наличия или отсутствия для различных значений времени запаздывания. Приходим, таким образом, к необходимости многоканальных корреляционных схем, что является недостатком при реализации алгоритмов обнаружения в радиолокации.
Для одноканальной обработки радиолокационной информации могут быть применены фильтровые и корреляционно—фильтровые системы.
2.1.6. Принципы фильтровой и корреляционно—фильтровой обработки сигналов
Считая вначале параметры сигнала известными полностью, потребуем,
чтобы элемент схемы оптимального приема вычислял корреляционный инте
грал для произвольного времени запаздывания ожидаемого сигнала . (24)
. (24)
Тогда корреляционный интеграл будет
 , (25)
, (25)
откуда видно, что схема вычисления корреляционного интеграла должна осуществлять операцию интегральной свертки. Для реализации математической операции (25) можно использовать фильтр, который будем называть оптимальным или согласованным фильтром.
Одной из основных характеристик произвольного линейного фильтра является его импульсная характеристика, которая описывает реакцию системы на входное воздействие в виде единичного импульса, поданного в момент времени t=0. Импульсная характеристика оптимального фильтра описывается следующим выражением:
 ,
,
где С и t0 - постоянные.
Анализ выражения показывает, что импульсная характеристика оптимального фильтра получается из функции u(t), описывающей сигнал с нулевым временем запаздывания, путем замены в ней аргумента t на to-t. Такое преобразование соответствует зеркальному отображению функции u(f) относительно прямой  . Зеркальная импульсная характеристика оптимального фильтра обеспечивает наилучшее обнаружение сигнала на фоне белого гауссова шума. Амплитуда сигнала на выходе оптимального фильтра определяет модульное значение корреляционного интеграла, необходимое при оптимальном обнаружении сигналов со случайной начальной фазой (амплитудой и начальной фазой).
. Зеркальная импульсная характеристика оптимального фильтра обеспечивает наилучшее обнаружение сигнала на фоне белого гауссова шума. Амплитуда сигнала на выходе оптимального фильтра определяет модульное значение корреляционного интеграла, необходимое при оптимальном обнаружении сигналов со случайной начальной фазой (амплитудой и начальной фазой).
На рис. 2.7 была изображена схема канала оптимальной обработки, которая позволяет производить обнаружение сигналов с неизвестной случайной начальной фазой, отличающихся временем запаздывания.
Наряду с импульсными характеристиками фильтров широко пользуются их частотными характеристиками. Частотную характеристику K(f) линейной цепи определяют, подавая на вход цепи гармоническое колебание. Напряжение на выходе будет

где  - входной сигнал.
- входной сигнал.
Частотная характеристика определится как отношение
 .
.
Окончательно частотная характеристика оптимального фильтра
 , (26)
, (26)
где С - произвольный вещественный множитель;
 - множитель запаздывания;
- множитель запаздывания;
 - сопряженная спектральная плотность ожидаемого сигнала.
- сопряженная спектральная плотность ожидаемого сигнала.
 .
.
Воспользовавшись записью спектральной плотности ожидаемого сигнала g(f) через модуль и аргумент можно перейти к амплитудно-частотным и фазо-во-частотным характеристикам оптимального фильтра.
Аплитудно-частотная характеристика (АЧХ) оптимального фильтра

пропорциональна амплитудно-частотному спектру ожидаемого сигнала. Оптимальный фильтр наилучшим образом пропускает спектральные составляющие, наиболее сильно выраженные в спектре. Слабые спектральные составляющие подавляются, в противном случае наряду с ними пройдут интенсивные составляющие помехи в широком диапазоне частот. Форма амплитудно-частотного спектра на выходе фильтра искажается, что является одной из причин искажения сигнала. Однако задачей фильтрации является не точное воспроизведение формы сигнала, а наилучшее выделение его на фоне помехи.
Фазо-частотная характеристика оптимального фильтра

складывается из аргумента спектра ожидаемого сигнала, взятого с обратным знаком, и аргумента задержки -  .
.
Напряжение на выходе фильтра в произвольный момент времени будет равно:
 .
.
После подстановки всех составляющих получим:
 (27)
(27)
Таким образом, напряжение на выходе оптимального фильтра, являясь наложением гармонических составляющих разных частот, определяется амплитудно-частотным спектром сигнала. Оно не зависит от фазо-частотного спектра, так как последний компенсируется фазо-частотной характеристикой фильтра. Поэтому все гармонические составляющие одновременно достигают амплитудных значений в момент времени  и эти значения налагаются
и эти значения налагаются

|
друг на друга (рис. 2.11). В этот момент имеет место максимум, который определяется величиной энергии входного сигнала
 .
.
Отношение сигнал-помеха на выходе оптимального фильтра по напряжению

| Рис. 2.11. Наложение максимумов гармонических составляющих |
зависит только от энергии полезного сигнала и спектральной плотности помехи N0 и не зависит от формы сигнала.
В каждом из вариантов оптимальной обработки при обнаружении встречается вычисление корреляционного интеграла или его модульных значений. Возможен комбинированный способ вычисления, при котором используется как непосредственное перемножение напряжений, так и фильтрация полученного при этом колебания. Приемник, построенный по такому принципу, называют корреляционно-фильтровыми. Различные виды корреляционно-фильтровой обработки имеют различную степень сложности.
Рассмотрим вначале случай обнаружения когерентной пачки радиоимпульсов, но без использования линии задержки с отводами, рассчитанной на большую задержку. Ожидаемую пачку радиоимпульсов  представим как произведение двух колебаний: колебания
представим как произведение двух колебаний: колебания  в виде неограниченной периодической последовательности видеоимпульсов и высокочастотного колебания
в виде неограниченной периодической последовательности видеоимпульсов и высокочастотного колебания  частоты
частоты  , модулированного огибающей пачки.
, модулированного огибающей пачки.
Операции взятия корреляционного интеграла

можно свести к следующим (рис. 2.12, а).

Рис. 2.12. Схемы корреляционно-фильтровой обработки
Принимаемое колебание y(f) стробируется с помощью периодической последовательности видеоимпульсов, временное положение которых соответствует принимаемой пачке. При этом получается колебание  . Стро-
. Стро-
бирование практически осуществимо лишь для фиксированных значений времени запаздывания, что ограничивает возможности корреляционно-фильтровой схемы по сравнению с фильтровой.
Последующие операции умножения y1(t) на x2(t, ) и интегрирования осуществляется фильтром с импульсной характеристикой  . Простым приближением к такому фильтру является узкополосный контур, полоса которого обратно пропорциональна длительности пачки.
. Простым приближением к такому фильтру является узкополосный контур, полоса которого обратно пропорциональна длительности пачки.
Интегрирование может производиться не только на высокой, но и на промежуточной частоте (рис. 2.12, б). В данной схеме преселектор позволяет подавить прием по зеркальному каналу.
2.1.7. Принципы оптимальной обработки некогерентных сигналов
Некогерентными называются сигналы, фазовую структуру которых нельзя считать закономерной. Такого вида сигналы часто встречаются в обзорных радиолокаторах. В силу случайности начальных фаз, когерентное накопление возможно лишь в пределах каждого из одиночных радиоимпульсов. Накопление же от импульса к импульсу может быть только последовательным - некогерентным.
Частное отношение правдоподобия представляет собой произведение двух степенных функций: степенной функции полного корреляционного интеграла Z и степенной функции полной энергии Э пачки
 ,
,
 ,
,
где  - модульное значение частного корреляционного интеграла, вычислен-
- модульное значение частного корреляционного интеграла, вычислен-
ное для случая, когда ожидаемым сигналом является г-й радиоимпульс;  - амплитудные множители, тождественно равные единице при не-
- амплитудные множители, тождественно равные единице при не-
флюктуирующей пачке.
Для некогерентных пачек отношение правдоподобия представляет собой произведение отношений правдоподобия для одиночных радиоимпульсов соответствующего вида, т.е. со случайной начальной фазой или случайными амплитудой и начальной фазой


Сравнение значений отношений правдоподобия / с порогом /0 может быть заменено сравнением со своими порогами значений In/. Для рассматриваемых случаев
 , (28)
, (28)
 . (29)
. (29)
Оптимальные обнаружители, построенные в соответствии с соотношениями (28) и (29), вычисляют модульные значения корреляционных интегралов и суммируют в общем случае нелинейные функции этих модульных значений.
Для нефлюктуирующих некогерентных пачек суммирование логарифмов  заменяется суммированием линейных или квадратичных функций величины , а именно, квадратичных, если амплитуды радиоимпульсов малы по сравнению с уровнем шума,
заменяется суммированием линейных или квадратичных функций величины , а именно, квадратичных, если амплитуды радиоимпульсов малы по сравнению с уровнем шума,

и линейных, если они велики
 .
.
Обычно комплексные амплитуды всех ожидаемых импульсов пачки соответствуют одному и тому же закону модуляции. Они различаются только: 1) моментами прихода импульсов  , зависящими от моментов зондирования и дальности, и 2) неслучайными множителями Si зависящими от формы огибающей пачки и угловой координаты. Поэтому все значения
, зависящими от моментов зондирования и дальности, и 2) неслучайными множителями Si зависящими от формы огибающей пачки и угловой координаты. Поэтому все значения

пропорциональны амплитудам некоторых однотипно получаемых видеоимпульсов  . Последние могут быть сняты с выхода единственного канала приема последовательно во времени. Достаточно, чтобы этот канал содержал схему
. Последние могут быть сняты с выхода единственного канала приема последовательно во времени. Достаточно, чтобы этот канал содержал схему
когерентной обработки для ожидаемого сигнала (оптимальный фильтр) и линейный детектор. Чтобы получить квадраты амплитуд Z{ линейный детектор заменяется квадратичным. Рассмотренный канал приема не учитывает форму огибающей пачки радиоимпульсов и не обеспечивает последетекторное суммирование. Указанные операции реализуются в следующей схеме оптимальной обработки (рис. 2.13).

В случае слабой нефлюктуирующей пачки, когда оптимален квадратичный детектор, последовательное суммирование импульсов производится с весовыми коэффициентами  . В случае нефлюктуирующей пачки импульсов большой амплитуды оптимален линейный детектор и последовательное суммирование производится с весовыми коэффициентами Ki =Si . В случае флюктуирующей пачки оптимален квадратичный детектор и последовательное суммирование производится с весовыми коэффициентами:
. В случае нефлюктуирующей пачки импульсов большой амплитуды оптимален линейный детектор и последовательное суммирование производится с весовыми коэффициентами Ki =Si . В случае флюктуирующей пачки оптимален квадратичный детектор и последовательное суммирование производится с весовыми коэффициентами:
 , где
, где  - отношение сигнал-помеха для
- отношение сигнал-помеха для
импульса с весовым множителем единица, средняя энергия которого равна Эо.
При обработке пачки отраженного сигнала определенные трудности возникают при осуществлении задержки, измеряемой длительностью пачки. В этом случае может быть использована одна линия задержки на период посылки, но за счет положительной обратной связи с выхода на вход ее превращают в рециркулятор на видеочастоте (рис. 2.9).
Широкое распространение находят схемы цифрового накопления или, иначе, схемы счета числа импульсов, превышающих порог. С учетом пропуска
отдельных импульсов из-за флюктуации или наложения противофазных шумов решение о наличии цели принимается, если налицо k и более импульсов из т возможных (критерий к/т). Для каждого т существует оптимальное значение  . Потери цифрового суммирования, по сравнению с квадратичным, не превышают ЗдБ.
. Потери цифрового суммирования, по сравнению с квадратичным, не превышают ЗдБ.
2.1.8. Принципы обработки широкополосных сигналов
Импульсный сигнал называется широкополосным, если произведение его длительности на ширину спектра частот  . Широкополосность
. Широкополосность
обычно достигается путем внутриимпульсной модуляции фазы (частоты) колебаний. Широкополосный импульс имеет ширину спектра в п раз большую, чем импульс той же длительности  без внутриимпульсной модуляции. Ширина спектра соответствует импульсу длительностью
без внутриимпульсной модуляции. Ширина спектра соответствует импульсу длительностью  .
.
Ранее было показано, что импульс на выходе оптимального фильтра определяется амплитудно-частотным спектром сигнала. Это значит, что широкополосный радиоимпульс преобразуется в своем оптимальном фильтре в импульс такой же длительности, что и импульсы длительности при воздействии на свой оптимальный фильтр. Иначе говоря, широкополосные радиоимпульсы сжимаются в оптимальных фильтрах, причем тем сильнее, чем больше произведение .
.

|
| Рис. 2.14. Разрешение при сжатии широкополосных радиоимпульсов в оптимальном фильтре |
Если два перекрывающихся сдвинутых широкополосных импульса воздействуют на соответствующий оптимальный фильтр (рис. 2.14), каждый из
них в силу применимости принципа суперпозиции к линейным системам сжимается независимо, т.е. имеется возможность разрешения сигналов от целей, импульсы которых перекрываются. Это позволяет наращивать длительности импульсов без ухудшения разрешающей способности по дальности. Увеличение длительности импульса является средством увеличения его энергии при неизменной пиковой мощности сигналов передатчика
 .
.
Наряду с увеличением энергии можно повышать в значительных пределах разрешающую способность по дальности, используя весьма широкополосные сигналы.
В качестве средства расширения спектра радиоимпульсов может быть применена фазовая манипуляция. Она состоит в том, что импульс длительностью разбивается на определенное число п более коротких сомкнутых между собой парциальных радиоимпульсов, в каждый из которых вводятся фазовые сдвиги  . Фазовые сдвиги могут быть кратны (или некратны) одному и тому же фазовому сдвигу, например, 2п/т, где т — целое число. При т>2 фазовая манипуляция называется многофазной, а при т=2 противофазной (возможны лишь два различных значения
. Фазовые сдвиги могут быть кратны (или некратны) одному и тому же фазовому сдвигу, например, 2п/т, где т — целое число. При т>2 фазовая манипуляция называется многофазной, а при т=2 противофазной (возможны лишь два различных значения  ). На рис. 2.15 изображен манипулиро-ванный по фазе 0, импульс и его условное обозначение.
). На рис. 2.15 изображен манипулиро-ванный по фазе 0, импульс и его условное обозначение.

Рис. 2.15. Фазо-манипулированный радиоимпульс (а)
и его условное изображение (б)
Спектр фазоманипулированного радиоимпульса можно представить как наложение спектров сдвинутых парциальных импульсов:
 ,
,
где  соответствует спектру первого из парциальных радиоимпульсов. В случае, когда
соответствует спектру первого из парциальных радиоимпульсов. В случае, когда  для всех к, фазоманипулированный радиоимпульс переходит в длинный немодулированный радиоимпульс.
для всех к, фазоманипулированный радиоимпульс переходит в длинный немодулированный радиоимпульс.
На рис. 2.16 изображены амплитудно-частотные спектры следующих сигналов: импульса длительности  (пунктир); немодулированного импульса такой же энергии длительностью
(пунктир); немодулированного импульса такой же энергии длительностью  (пунктир); фазоманипулированного
(пунктир); фазоманипулированного
импульса при значениях сk, соответствующих коду + + +--+- (сплошная
линия). Ширина спектра фазоманипулированного импульса длительностью имеет тот же порядок, что и ширина спектра парциального импульса длительностью .
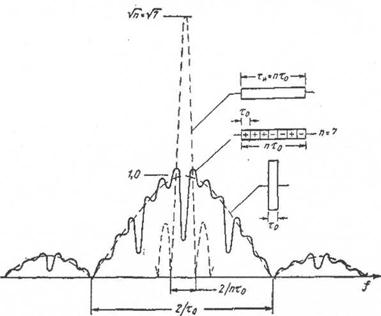
Рис. 2.16. Амплитудно-частотные спектры радиоимпульсов:
фазо-манипулированного (сплошная кривая), парциального дли-
тельностью и немодулированного длительностью п (пунктир)
Другим способом расширения спектра импульса является применение частотной манипуляции. На рис. 2.17 изображен составной импульс длительно-стью , полученный путем стыковки (с точностью до фазы) более коротких импульсов длительностью .
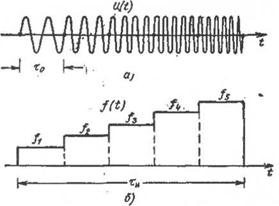
Рис. 2.17. Частотно манипулированный радиоимпульс (а) и закон изменения частоты (б) в импульсе
 Частота колебаний от импульса к импульсу меняется скачком, так что результирующий спектр складывается из взаимно смещенных парциальных спектров. Наряду со ступенчатым изменением частоты возможно плавное (линейное) изменение частоты. Радиоимпульс называется при этом частотно-модулированным (линейно частотно-модулированным).
Частота колебаний от импульса к импульсу меняется скачком, так что результирующий спектр складывается из взаимно смещенных парциальных спектров. Наряду со ступенчатым изменением частоты возможно плавное (линейное) изменение частоты. Радиоимпульс называется при этом частотно-модулированным (линейно частотно-модулированным).
На рис. 2.18 изображены закон изменения частоты внутри импульса и амплитудно-частотный спектр линейно частотно-модулированного сигнала.
Рис. 2.18. Закон изменения частоты
F(t) (а), амплитудно-частотный спектр
(сплошная линия) и его аппроксима-
ция (пунктир) при линейной частот-
ной модуляции радиоимпульса (б)
При обработке широкополосных сигналов, в оптимальных фильтрах обеспечивается их сжатие. Рассмотрим вначале процесс сжатия фазоманипули-рованного радиоимпульса длительностью , составленного из парциальных импульсов длительностью  (рис. 2.19). В течение промежутка времени
(рис. 2.19). В течение промежутка времени

То частота колебаний одинакова /0, начальная фаза при переходе к очередному парциальному импульсу может изменяться скачком на п. Оптимальная импульсная характеристика схематически изображена на рис. 2.19, б. Оптимальный
Рис. 2.19. Условное изображение фильтр с такой характеристикой может быть по-
фазо-манипулированного радио- строен с использованием линии задержки с от
импульса (а) и оптимальной им- водами и сумматора, к которому часть отводов
пульсной характеристики (б) подключена через инверсные каскады (рис.2.20).

|
Рис. 2.20. Формирование импульсной характеристики, оптимальной для фазо-манипулированного радиоимпульса (рис.2.19).

|

Рис. 2.21. Процесс оптимальной фильт- рации фазо-манипулированного радио- импульса
Выходное напряжение сумматора подается на оконечный фильтр, который является оптимальным для элементарного импульса длительностью . На
рис. 2.21, а схематически изображены сдвинутые во времени входные радиоимпульсы с учетом наличия инверсных каскадов. Результат суммирования изображен на рис. 2.21, б, а выходное напряжение оптимального фильтра в целом -на рис. 2.21, в. Длительность основного выброса выходного сигнала существенно меньше длительности сигнала на входе.
Рассмотрим далее обработку частотно-манипулированных радиоимпульсов. На рис. 2.22 изображена схема, позволяющая формировать такие сигналы и

Рис. 2.22. Формирование импульсной характеристики в виде
частотно-манипулированного радиоимпульса
импульсные характеристики. Эта схема состоит из линии задержки с подключенными к ее отводам колебательным контурам и сумматора.
При воздействии  - функции на вход системы в каждом из контуров последовательно возбуждаются импульсные переходные процессы, а на выходе сумматора формируется протяженное частотно-модулированное колебание. Примерный вид амплитудно-частотной и фазо-частотной характеристик элементов цепей, подключаемых к сумматору, изображен на рис. 2.23. Фазо-частотная характеристика каждого элемента цепи определяется соответствующей задержкой и имеет тем больший наклон, чем больше эта задержка. Задержка огибающей группы близких по частоте спектральных составляющих
- функции на вход системы в каждом из контуров последовательно возбуждаются импульсные переходные процессы, а на выходе сумматора формируется протяженное частотно-модулированное колебание. Примерный вид амплитудно-частотной и фазо-частотной характеристик элементов цепей, подключаемых к сумматору, изображен на рис. 2.23. Фазо-частотная характеристика каждого элемента цепи определяется соответствующей задержкой и имеет тем больший наклон, чем больше эта задержка. Задержка огибающей группы близких по частоте спектральных составляющих
 ,
,
где k(f) - фазо-частотная характеристика.
График зависимости задержки от частоты изображен на рис. 2.23, в.

Рассмотренная схема (рис. 2.22) способна осуществлять сжатие радиоимпульса, зеркального по отношении к ее импульсной характеристике.
Если от частотно-манипулированного радиоимпульса перейти к частотно-модулированному (рис. 2.24, а), то импульсная характеристика оптимального фильтра перейдет в частотно-модулированное колебание с зеркальным по отношению к сигналу законом частотной модуляции.

Оптимальный фильтр должен осуществлять разную задержку различных групп частот. Рисунку 2.24, б соответствует меньшая задержка низких частот и большая задержка высоких. Для этого время группового запаздывания в линии должно изменяться в диапазоне частот сигнала по определенному закону, в данном случае по линейному. Линии задержки с переменным временем группового запаздывания называют дисперсионными. Линия с характеристикой
 изображенной на рис. 2.24, е, задерживает в большей степени высокие, чем низкие частоты. Подадим на нее импульс, мгновенная частота которого изменяется от более высокой в начале до более низкой в конце импульса. Таким образом, более высокие частоты будут действовать ранее, но задерживаются в большей степени, а более низкие действуют позже, но задерживаются меньше. Это позволяет совместить все группы частот и образовать сжатый импульс.
изображенной на рис. 2.24, е, задерживает в большей степени высокие, чем низкие частоты. Подадим на нее импульс, мгновенная частота которого изменяется от более высокой в начале до более низкой в конце импульса. Таким образом, более высокие частоты будут действовать ранее, но задерживаются в большей степени, а более низкие действуют позже, но задерживаются меньше. Это позволяет совместить все группы частот и образовать сжатый импульс.
Компенсация фазо-частотного спектра сигнала является основной причиной временного сжатия, приводя к согласованному наложению гармонических составляющих и образованию пика сжатого радиоимпульса. Степень сжатия импульса полностью определяется пределами изменения частоты в импульсе (девиацией частоты)

где а — скорость изменения частоты.
Длительность импульса на выходе фильтра равна:

Коэффициент сжатия импульса:

В качестве сжимающего фильтра можно использовать, например, оптимальный фильтр, состоящий из ультразвуковой дисперсионной линии задержки с полосовым корректирующим усилителем на выходе. Ультразвуковая дисперсионная линия задержки состоит из двух пьезокерамических преобразователей

 электрических колебаний в механические колебания и полоски алюминия. Время задержки такой линии зависит от частоты и в пределах частот от
электрических колебаний в механические колебания и полоски алюминия. Время задержки такой линии зависит от частоты и в пределах частот от
до изменяется линейно с частотой. Структурная схема оптимального фильтра изображена на рис. 2.25.
 |

Наряду с дисперсионными ультразвуковыми и электрическими линиями задержки в качестве элементов оптимальных фильтров могут использоваться недиспергирующие линии задержки с неравномерно распределенными дискретными съемами. Принцип формирования частотно-модулированной импульсной характеристики пояснен на рис. 2.26.
Еще одним направлением построения широкополосных оптимальных фильтров является использование дисперсионных явлений на сверхвысоких частотах в так называемых магнитоупругих линиях задержки на базе кристаллов железоиттриевого граната. В таких кристаллах могут распространяться акустические и спиновые волны (волны намагничивания). Спиновые волны распространяются с групповой скоростью, зависящей от величины приложенного постоянного продольного магнитного поля и частоты распространяющихся колебаний, что позволяет создавать линии задержки с линейной дисперсионной характеристикой.
Фильтры для линейно частотно-модулированных (ЛЧМ) сигналов могут быть реализованы при использовании поверхностных акустических волн (ПАВ). Физической основой получения требуемой дисперсионной характеристики при использовании ПАВ является не дисперсия скорости волны, а пространственное разделение преобразователей, настроенных на разные частоты. Этот принцип иллюстрируется эпюрами, изображенными на рис. 2.27.
2.1.9. Ранговые обнаружители
Обнаружители, не зависящие от вида распределения, уменьшают зависимость вероятности ложной тревоги от статистического характера сигнала на входе обнаружителя. Это достигается сведением к минимуму числа допущений относительно точного характера распределения вероятности сигнала на входе обнаружителя. Качество обнаружителя в реальной ситуации зависит от того, насколько хорошо выполняются исходные допущения, принятые при его синтезе. Очевидно, чем меньше исходных допущений, тем шире круг возможных ситуаций, которые им отвечают, так что обнаружитель, не зависящий от конкретного вида распределения, наименее чувствителен к отклонениям от принятой модели. Практически это означает, что такой обнаружитель должен быть полезен в более широком кругу реальных ситуаций, чем параметрический обнаружитель.
Обнаружители, не зависящие от вида рас
– Конец работы –
Эта тема принадлежит разделу:
Теоретические основы радиолокации
Красноярский Государственный Технический Университет...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Обнаружение радиолокационных сигналов
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.036 сек.
Новости и инфо для студентов