рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Характеристики обнаружения радиолокационных сигналов с полностью известными параметрами
Реферат Курсовая Конспект
Характеристики обнаружения радиолокационных сигналов с полностью известными параметрами
Характеристики обнаружения радиолокационных сигналов с полностью известными параметрами - раздел Образование, КОНСПЕКТ ЛЕКЦИЙ По курсу ОСНОВЫ РАДИОЛОКАЦИИ Полностью Известным Называется Радиолокационный Сигнал, Значение Которого, Ес...
Полностью известным называется радиолокационный сигнал, значение которого, если он имеется на входе приёмника, может быть заранее точно указано для любого момента времени. Пусть, например, используется сигнал длительностью τс
 . .
| (5.5) |
где А≠0 лишь в интервале времени t1<t<t1+τс.
Для полного знания такого сигнала необходимо заранее точно определить значения параметров А, ω и ψ0. Единственное, что предполагается заранее неизвестным, это сам факт наличия сигнала: сигнал может существовать, а может и отсутствовать в данное время. Задача приёмника – облегчить принятие правильного решения.
В реальных условиях обычно неизвестны значения всех перечисленных параметров обнаруживаемого сигнала.
Если требуется построить приёмник, оптимальный в соответствии с критерием идеального наблюдателя, то он должен обеспечивать определение апостериорных (т.е. получаемых после обработки входного напряжения) вероятностей наличия и отсутствия входного сигнала и сравнение их между собой. Решение следует принимать в соответствии с тем, какая из вероятностей окажется больше. При этом вероятность ошибки будет минимально возможной, что и требуется по выбранному критерию оптимальности.
Нетрудно убедиться в том, что подобный приёмник будет оптимальным и в соответствии с критерием Неймана-Пирсона, когда Wлт считается заданной и требуется обеспечить максимум Wпо. Если Wлт=const, а W(uc) и W(0) известны до опыта, то минимуму вероятности полной ошибки соответствует минимум вероятности пропуска сигнала. Но так как Wпр=1- Wпо, то, добиваясь получения минимальной вероятности полной ошибки, одновременно обеспечивается максимум вероятности правильного обнаружения.
Для выявления структуры оптимального приёмника следует проанализировать выражения, определяющие указанные апостериорные вероятности. Сначала обратимся к плотностям апостериорных распределений, предполагая, что полностью известных сигналов может быть бесконечное множество, кодирование сигналов производится по амплитуде, амплитуды сигналов лежат в пределах от Амакс до нуля, а различие амплитуд двух соседних сигналов бесконечно мало. Все параметры каждого сигнала заранее известны. Неизвестно, какой из сигналов имеется в данное время. Отсутствие сигналов соответствует при данной постановке задачи наличию сигнала с нулевой амплитудой.
Из теоремы Байеса следует, что плотность апостериорной вероятности наличия различных сигналов во входном напряжении равна
 , ,
| (5.6) |
где К – нормирующий множитель, определяемый из условия, что интеграл от плотности апостериорной вероятности сигналов по всей области этих сигналов должен быть равен единице:
 ; ;
|
ω(uc) – плотность априорной вероятности присутствия различных сигналов uc;  плотность условной вероятности образования входного напряжения uвх при наличии на входе сигнала uc.
плотность условной вероятности образования входного напряжения uвх при наличии на входе сигнала uc.
Так как К – постоянная величина, априорное распределение сигналов ω(uc) должно быть известно до опыта, то для определения апостериорного распределения нужно найти функцию , называемую функцией правдоподобия. Эта функция позволяет определить, какому сигналу правдоподобнее всего соответствует имеющееся входное напряжение.
, называемую функцией правдоподобия. Эта функция позволяет определить, какому сигналу правдоподобнее всего соответствует имеющееся входное напряжение.
Во входном напряжении случайной величиной является только шум. Пусть шум имеет равномерный спектр в области частот, значительно превышающий полосу пропускания приёмника РЛС Δfпр. Мгновенные значения шумового напряжения подчинены нормальному распределению
 , ,
| (5.7) |
где σш – среднее квадратическое или эффективное значение напряжения шума;
σш2 – дисперсия шума, равная мощности шума Рш, выделяемой на сопротивлении 1 Ом.
Анализируя входное напряжение приёмника в течение времени существования сигнала τс, необходимо представить шумовое напряжение k его независимыми дискретными значениями (согласно теореме Котельникова)
 , ,
|
где fв – наивысшая частота полосы пропускания приёмника.
Многомерная плотность распределения шума выражается:
| (5.8) |
Так как сигнал является закономерно изменяющейся величиной, а случайным изменениям подвержен только шум, то распределение входного напряжения определяется распределением шума. Поэтому для определения функции правдоподобия вместо напряжения шума нужно использовать равную ему разность входного напряжения и напряжения сигнала

|
и

| (5.9) |
И тогда плотность апостериорной вероятности равна:
 
| (5.10) |
Здесь интеграл  характеризует энергию входного воздействия. В дальнейшем можно объединить экспоненциальный множитель
характеризует энергию входного воздействия. В дальнейшем можно объединить экспоненциальный множитель  , К и
, К и  и обозначить это произведение символом К1 :
и обозначить это произведение символом К1 :

|
Интеграл  определяет энергию принимаемого сигнала – величину, известную до опыта, но он не несет новой информации о сигнале.
определяет энергию принимаемого сигнала – величину, известную до опыта, но он не несет новой информации о сигнале.
Интеграл  позволяет получить дополнительную (к ранее известной, априорной) информацию о присутствии сигнала. Тогда плотность апостериорной вероятности можно представить в виде:
позволяет получить дополнительную (к ранее известной, априорной) информацию о присутствии сигнала. Тогда плотность апостериорной вероятности можно представить в виде:

| (5.11) |
Используя (5.11), обратимся к решению задачи обнаружения одного единственного полностью известного сигнала. Вместо плотности распределения апостериорной вероятности множества сигналов теперь будет лишь две вероятности двух возможных событий: апостериорная вероятность наличия сигнала  и апостериорная вероятность его отсутствия
и апостериорная вероятность его отсутствия  . Выражение, определяющее , получим из (), подставив в него вместо априорного распределения сигналов априорную вероятность появления одного возможного сигнала
. Выражение, определяющее , получим из (), подставив в него вместо априорного распределения сигналов априорную вероятность появления одного возможного сигнала  , т.е.
, т.е.

| (5.12) |
Для определения апостериорной вероятности отсутствия сигнала необходимо в (5.11) подставить априорную вероятность того, что сигнала нет W(0) и приравнять к нулю энергию сигнала (Ес=0), тогда

| (5.13) |
В оптимальном приёмнике следовало бы выполнить операции (5.12) и (5.13) и сравнить полученные результаты между собой; в зависимости от того, что будет больше, принимается решение о наличии сигнала.
Но можно существенно упростить решаемую техническую задачу. С принципиальной точки зрения безразлично, что сравнивать - значения самих апостериорных вероятностей или значения монотонных функций этих величин. Если использовать логарифмы апостериорных вероятностей, то устройство оптимального приёмника сильно упрощается:
 , ,
| (5.14а) |
 . .
| (5.14б) |
Значит, в приёмнике нужно воссоздать величины, соответствующие функциям (5.14а) и (5.14б), и определить, какая из них больше. Но это равнозначно сравнению величин
 и и  . .
|
Таким образом, в приёмнике, оптимальном по критерию идеального наблюдателя (а значит и по критерию Неймана-Пирсона), при обнаружении полностью известного сигнала, достаточно образовать интеграл вида
 . .
| (5.15а) |
и сравнить результат интегрирования (после умножения на постоянный множитель 2/N0) с величиной, называемой порогом:
 , ,
| (5.15б) |
Если порог превышен, то принимается решение о наличии сигнала; если порог не превышен, то считают, что сигнала нет. Практически в приёмнике сравниваются не сами указанные величины, а пропорциональные им напряжения: напряжение на выходе схемы интегрирования

|
и пороговое напряжение
 ; ;
|
здесь а – одинаковый для обеих схем коэффициент пропорциональности. При математическом анализе процессов будем считать коэффициент а равным единице.
Приёмник, в котором выполняются указанные операции, называется достаточным. На рис.5.2 изображена функциональная схема достаточного приёмника для обнаружения полностью известного сигнала. В связи с тем, что схемы умножения и интегрирования в приёмнике производят операции, с точностью до постоянного множителя совпадающие с корреляционной функцией входного и опорного напряжений, такой приёмник называют корреляционным.
Входной сигнал и опорное напряжение всегда находятся в фазе, поэтому при отсутствии шума выходное напряжение коррелятора (Uвых) линейно нарастало бы в течение всей длительности сигнала. Выходное напряжение достигает максимума в момент t0, соответствующий концу сигнала. После этого должно быть обеспечено спадание выходного напряжения до нуля для того, чтобы подготовить приёмник к обнаружению других сигналов.
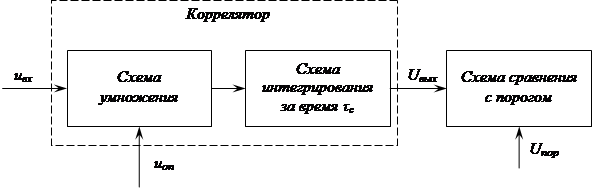
Рис.5.2.Функциональная схема корреляционного приёмника.
Если бы на входе приёмника был бы один шум, имеющий случайные амплитуду и фазу колебаний, то в результате перемножения опорного напряжения с входным образовалось бы случайное по амплитуде и знаку напряжение.
Когда на входе приёмника имеются и сигнал, и шум, напряжение на выходе схемы перемножения будет алгебраической суммой того, что мы получили бы при воздействии только сигнала и только шума; схему перемножения можно считать линейным радиотехническим устройством. Выходное напряжение коррелятора при одновременном воздействии сигнала и шума будет случайной величиной. Предсказать значения выходного напряжения коррелятора нельзя. Но известно, что составляющая напряжения от сигнала будет достигать своего максимума в момент и именно в этот момент отношение напряжения сигнала к среднему квадратическому значению напряжения шума на выходе коррелятора достигает максимума. В момент t0 следует производить сравнение выходного напряжения коррелятора с порогом. При этом вероятность правильного суждения о наличии или отсутствии сигнала будет наибольшей.
Рассмотрим зависимости, позволяющие определить вероятности правильного обнаружения и ложной тревоги в оптимальной системе обработки входного напряжения. Образующийся в приёмнике после интегрирования сигнал можно разложить на две составляющие, принимая во внимание, что входное напряжение состоит из сигнала и шума:

|
Первая составляющая, содержащая произведение сигнала и опорного напряжения, равна
 . .
| (5.16) |
Так как опорное напряжение точно совпадает с напряжением сигнала, то значение величины S вполне определенно:
 . .
| (5.17а) |
В общем случае, когда рассматривается обнаружение сигнала с неизвестными заранее параметрами, величина S становится функцией временного сдвига S(t) и её называют сигнальной функцией.
Вторая составляющая содержит произведение шума с опорным напряжением и называется шумовой функцией:
 . .
| (5.17б) |
Если сигнала нет, то на выходе коррелятора имеется только шумовая функцией; превышение ею порога составляет ложную тревогу. Шумовая функция является случайной величиной с нормальным законом распределения (так как сам шум распределен по нормальному закону, а uоп(t) – детерминированная величина) со средним значением, равным нулю, и дисперсией
 ; ;
|
здесь Еоп – энергия опорного напряжения за длительность сигнала.
Так как Еоп=Ес, то дисперсия шумовой функции равна удвоенному отношению энергии сигнала и спектральной плотности шума
 ; ;
|
Среднее квадратическое значение шумовой функции
 . .
| (5.17в) |
Таким образом, максимальное отношение сигнал/шум по напряжению на выходе коррелятора (так же как и на выходе согласованного с сигналом фильтра) составляет
 , ,
| (5.18) |
т.е. оно зависит только от соотношения энергии сигнала и спектральной плотности шума на входе приёмника.
С учётом сказанного плотность распределения шумовой функции равна
 . .
| (5.19) |
Вероятность ложной тревоги представляет собой вероятность того, что шумовая функция превысит порог β, т.е.
 . .
| (5.20) |
Используя функцию Лапласа
 , ,
|
формулу (5.20) можно преобразовать
 . .
| (5.21) |
При наличии сигнала следует учитывать и шумовую и сигнальную функцию. Выходное напряжение коррелятора будет характеризоваться суммой шумовой функции и постоянной величины 2Ес/N0. Плотность распределения этой суммы подчиняется нормальному закону со средним значением, равным  , и дисперсией
, и дисперсией 
 . .
|
Вероятность правильного обнаружения представляет собой вероятность того, что α превысит порог, т.е.
 . .
| (5.22) |
Используя функцию Лапласа, получим
 . .
| (5.23) |
Формулы (5.21) и (5.23) устанавливают взаимосвязь между вероятностями правильного обнаружения и ложной тревоги, с одной стороны, и пороговым уровнем и энергетическим отношением сигнал/шум на входе приёмника, с другой. Задавшись значениями β и q0, можно вычислить Wпо и Wлт.
– Конец работы –
Эта тема принадлежит разделу:
КОНСПЕКТ ЛЕКЦИЙ По курсу ОСНОВЫ РАДИОЛОКАЦИИ
АКАДЕМИЯ ГРАЖДАНСКОЙ АВАИЦИИ... АВИАЦИОННЫЙ КОЛЛЕДЖ... Отделение...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Характеристики обнаружения радиолокационных сигналов с полностью известными параметрами
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.023 сек.
Новости и инфо для студентов