рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Физика
- /
- ДВИЖЕНИЕ ЦЕНТРА МАСС ТВЕРДОГО ТЕЛА
Реферат Курсовая Конспект
ДВИЖЕНИЕ ЦЕНТРА МАСС ТВЕРДОГО ТЕЛА
ДВИЖЕНИЕ ЦЕНТРА МАСС ТВЕРДОГО ТЕЛА - раздел Физика, ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ Представим Твердое Тело Как Систему Материальных Точек, Разбив Его На Элемент...
Представим твердое тело как систему материальных точек, разбив его на элементарные массы  . Каждая масса может находиться под воздействием внутренних сил
. Каждая масса может находиться под воздействием внутренних сил  и внешних
и внешних  . По второму закону Ньютона
. По второму закону Ньютона  .
.
Сложив эти уравнения для всех частиц тела, получаем
 .
.
Сумма всех внутренних сил, действующих в системе, равна нулю, тогда
 .
.
Сумму, стоящую в левой части, можно заменить произведением массы системы на ускорение центра масс , поэтому
, поэтому
 .
.
- центр масс (инерции) твердого тела движется так, как двигалась бы материальная точка с массой, равной массе тела, под действием всех приложенных к телу сил, на ускорение центра масс (см. главу 2).
 5.3. ОСНОВНОЕ УРАВНЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА С ЗАКРЕПЛЕННОЙ ОСЬЮ ВРАЩЕНИЯ. МОМЕНТ ИМПУЛЬСА ТЕЛА
5.3. ОСНОВНОЕ УРАВНЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА С ЗАКРЕПЛЕННОЙ ОСЬЮ ВРАЩЕНИЯ. МОМЕНТ ИМПУЛЬСА ТЕЛА
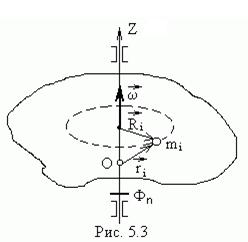
Рассмотрим твердое тело, которое может вращаться вокруг неподвижной вертикальной оси (рис.5.3). Чтобы удержать ось от перемещений в пространстве, заключим ее в подшипники.
Абсолютно твердое тело – это система материальных точек с неизменным расстоянием между ними, и для всех его частиц (материальных точек) справедливо уравнение: . Это уравнение справедливо и для твердого тела. При этом под
. Это уравнение справедливо и для твердого тела. При этом под  следует понимать момент импульса тела, а
следует понимать момент импульса тела, а  есть сумма моментов всех внешних сил,
есть сумма моментов всех внешних сил,  .
.
Возьмем на оси вращения точку О и будем характеризовать положение образующих тело частиц радиус-векторами  , проведенными
, проведенными 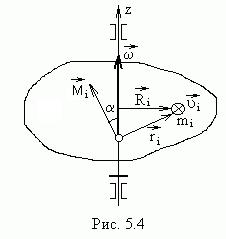 из этой точки (на рис.5.3 показана
из этой точки (на рис.5.3 показана  -я частица с массой
-я частица с массой  ). Момент импульса -той частицы относительно точки О равен
). Момент импульса -той частицы относительно точки О равен  Векторы
Векторы  и
и  для всех частиц тела взаимно перпендикулярны, поэтому модуль вектора
для всех частиц тела взаимно перпендикулярны, поэтому модуль вектора  равен
равен
 .
.
 Направление вектора показано на рис.5.4, его модуль пропорционален угловой скорости
Направление вектора показано на рис.5.4, его модуль пропорционален угловой скорости  . Направление не зависит от
. Направление не зависит от  , так как лежит в плоскости, проходящей через ось вращения и частицу
, так как лежит в плоскости, проходящей через ось вращения и частицу  , и перпендикулярен . Проекция вектора на ось вращения
, и перпендикулярен . Проекция вектора на ось вращения  , как следует из рис.5.4 , равна
, как следует из рис.5.4 , равна
 .
.
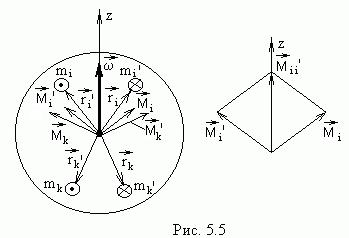
Очевидно, для однородного тела вращения суммарный момент импульса направлен по оси вращения в ту же сторону, что и (рис.5.5). Действительно, разобьем тело на пары равных по массе и расположенных симметрично частиц (на рис. 5.5 показаны пары -  и
и  ). Сумма моментов каждой пары
). Сумма моментов каждой пары  и
и  направлена вдоль вектора , поэтому суммарный момент
направлена вдоль вектора , поэтому суммарный момент  также будет совпадать по направления с , и модуль вектора
также будет совпадать по направления с , и модуль вектора  равен его проекции на ось
равен его проекции на ось
 . (5.1)
. (5.1)
Величина  , равная сумме произведений элементарных масс на квадраты их расстояний до некоторой оси, называется моментом инерции тела относительно этой оси:
, равная сумме произведений элементарных масс на квадраты их расстояний до некоторой оси, называется моментом инерции тела относительно этой оси:
 . (5.2)
. (5.2)
Тогда выражение (5.1) принимает вид:
 . (5.3)
. (5.3)
Так как векторы и имеют одинаковые направления, в векторной форме
получаем:
 (5.4)
(5.4)
Это выражение справедливо только для однородного тела, вращающегося вокруг оси симметрии. В общем случае оно не выполняется.
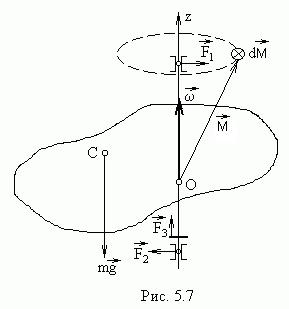
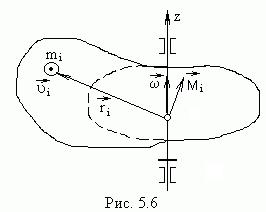 Для несимметричного или неоднородного тела момент импульса не совпадает по направлению с вектором . На рис.5.6 пунктиром выделена та часть несимметричного однородного тела, которая симметрична относительно оси вращения. Суммарный момент импульса этой части направлен вдоль . Момент каждой частицы, не входящей в симметричную часть, отклонен от оси вращения ( вправо для ситуации, представленной на рис.5.6). Полный момент импульса всего тела будет отклонен в ту же сторону (рис.5.7). При вращении тела вектор поворачивается вместе с ним, описывая конус. За время
Для несимметричного или неоднородного тела момент импульса не совпадает по направлению с вектором . На рис.5.6 пунктиром выделена та часть несимметричного однородного тела, которая симметрична относительно оси вращения. Суммарный момент импульса этой части направлен вдоль . Момент каждой частицы, не входящей в симметричную часть, отклонен от оси вращения ( вправо для ситуации, представленной на рис.5.6). Полный момент импульса всего тела будет отклонен в ту же сторону (рис.5.7). При вращении тела вектор поворачивается вместе с ним, описывая конус. За время  вектор получает приращение
вектор получает приращение  . Если вектор не изменяется по величине, то вектор
. Если вектор не изменяется по величине, то вектор  направлен за чертеж на рис.5.7, так же направлен и вектор
направлен за чертеж на рис.5.7, так же направлен и вектор  . На этом рисунке момент внешних сил создается силами тяжести
. На этом рисунке момент внешних сил создается силами тяжести  (сила приложена в центре масс тела С), бокового давления подшипников на ось
(сила приложена в центре масс тела С), бокового давления подшипников на ось  и
и  , а также давления бортика подшипника на фланец
, а также давления бортика подшипника на фланец  . Силы трения отсутствуют.
. Силы трения отсутствуют.
Момент импульса относительно оси вращения для любого тела равен
 (5.5)
(5.5)
В отличие от (5.4) эта формула выполняется для любого тела. Тогда
 . (5.6)
. (5.6)
Подставив (5.5) в выражение (5.6), получаем
 , (5.7)
, (5.7)
 где
где  - проекция углового ускорения на ось . Уравнение (5.7) аналогично второму закону Ньютона
- проекция углового ускорения на ось . Уравнение (5.7) аналогично второму закону Ньютона  . Роль массы играет момент инерции, роль линейного ускорения - угловое ускорение, роль суммарной силы - суммарный момент внешних сил. Поэтому (5.7) описывает динамику тела, вращающегося вокруг неподвижной оси, и называется основным уравнением динамики вращающегося тела.
. Роль массы играет момент инерции, роль линейного ускорения - угловое ускорение, роль суммарной силы - суммарный момент внешних сил. Поэтому (5.7) описывает динамику тела, вращающегося вокруг неподвижной оси, и называется основным уравнением динамики вращающегося тела.
В случае вращения однородного симметричного тела силы бокового давления на подшипники не возникают (рис.5.8). В этом случае при отсутствии силы тяжести ось сохраняет свое положение в пространстве. Ось, положение которой в пространстве остается неизменным при вращении вокруг не тела в отсутствие внешних сил, называется свободной осью тела.
 Для тела любой формы с произвольным распределением массы существуют три взаимно перпендикулярные, проходящие через центр масс тела оси, которые являются свободными осями. Они называются главными осями инерции тела.
Для тела любой формы с произвольным распределением массы существуют три взаимно перпендикулярные, проходящие через центр масс тела оси, которые являются свободными осями. Они называются главными осями инерции тела.
У однородного параллелепипеда (рис.5.9) главными осями инерции являются оси  , проходящие через центры противоположных граней.
, проходящие через центры противоположных граней.
 У тела, обладающего осевой симметрией, например, у цилиндра (рис.5.10) одной из главных осей является ось симметрии, две другие – любые две взаимно перпендикулярные оси, лежащие в плоскости, перпендикулярной к оси симметрии и проходящие через центр масс тела. Таким образом, у тела с осевой симметрией фиксирована только одна из главных осей инерции.
У тела, обладающего осевой симметрией, например, у цилиндра (рис.5.10) одной из главных осей является ось симметрии, две другие – любые две взаимно перпендикулярные оси, лежащие в плоскости, перпендикулярной к оси симметрии и проходящие через центр масс тела. Таким образом, у тела с осевой симметрией фиксирована только одна из главных осей инерции.
У тела с центральной симметрией (шар) главными осями инерции являются любые три взаимно перпендикулярные оси, проходящие через центр масс, т.е. ни одна из главных осей не фиксирована.
Моменты инерции относительно главных осей называются главными моментами инерции тела. В общем случае эти моменты различны:  . Для тела с осевой симметрией два главных момента одинаковы, а третий от них отличен,
. Для тела с осевой симметрией два главных момента одинаковы, а третий от них отличен,  . Такие тела называются симметричными волчками. У тел с центральной симметрией все три главных момента инерции одинаковы, эти тела называют шаровыми волчками.
. Такие тела называются симметричными волчками. У тел с центральной симметрией все три главных момента инерции одинаковы, эти тела называют шаровыми волчками.
 Важной особенностью главных осей является то, что при вращении тела вокруг любой из них его момент импульса совпадает по направлению с угловой скоростью
Важной особенностью главных осей является то, что при вращении тела вокруг любой из них его момент импульса совпадает по направлению с угловой скоростью  и определяется как
и определяется как  , где
, где  - момент инерции тела относительно данной главной оси (Заметим, что последнее соотношение справедливо и относительно осей, параллельных главным осям тела и не проходящих через его центр масс). Причем не зависит от выбора точки, относительно которой его определяют (здесь предполагается, что ось вращения неподвижна).
- момент инерции тела относительно данной главной оси (Заметим, что последнее соотношение справедливо и относительно осей, параллельных главным осям тела и не проходящих через его центр масс). Причем не зависит от выбора точки, относительно которой его определяют (здесь предполагается, что ось вращения неподвижна).
Если твердое тело привести во вращение и затем предоставить самому себе, то направление оси вращения в пространстве, вообще говоря, будет меняться. Для того чтобы произвольная ось вращения тела сохраняла свое направление неизменным, к ей необходимо приложить определенные силы. Рассмотрим этот вопрос более подробно на следующем примере. Пусть середина С однородного стержня жестко скреплена с осью вращения так, что угол между стержнем и осью равен  (рис. 5. 11). Найдем момент
(рис. 5. 11). Найдем момент  внешних сил, которые необходимо приложить к оси вращения, чтобы при вращении стержня с угловой скоростью ее направление не менялось. Согласно основному уравнению динамики вращательного движения,
внешних сил, которые необходимо приложить к оси вращения, чтобы при вращении стержня с угловой скоростью ее направление не менялось. Согласно основному уравнению динамики вращательного движения,  . Таким образом, чтобы определить , сначала надо найти момент импульса стержня , а затем его производную по времени. Момент импульса проще всего определить относительно точки С. Мысленно выделим элемент стержня массы
. Таким образом, чтобы определить , сначала надо найти момент импульса стержня , а затем его производную по времени. Момент импульса проще всего определить относительно точки С. Мысленно выделим элемент стержня массы  , находящейся на расстоянии r от точки С. Его момент импульса относительно этой точки
, находящейся на расстоянии r от точки С. Его момент импульса относительно этой точки  , где
, где  - скорость элемента. Легко видеть, что вектор
- скорость элемента. Легко видеть, что вектор  направлен перпендикулярно стержню (рис. 5.11), причем его направление не зависит от выбора элемента
направлен перпендикулярно стержню (рис. 5.11), причем его направление не зависит от выбора элемента  . Поэтому суммарный момент импульса стержня совпадает по направлению с вектором . Заметим, что в данном случае вектор не совпадает по направлению с вектором
. Поэтому суммарный момент импульса стержня совпадает по направлению с вектором . Заметим, что в данном случае вектор не совпадает по направлению с вектором  ! При вращении стержня вектор будет также вращаться с угловой скоростью . За промежуток времени
! При вращении стержня вектор будет также вращаться с угловой скоростью . За промежуток времени  вектор получает приращение
вектор получает приращение  , модуль которого, как видно из (рис. 5.11) равен
, модуль которого, как видно из (рис. 5.11) равен  , или в векторной форме
, или в векторной форме  .
.
Поделив обе части последнего выражения на , получим  .
.
Таким образом, действительно, для удержания оси вращения в неизменном направлении к ней необходимо в данном случае приложить момент  некоторых внешних сил
некоторых внешних сил  (они показаны на рис. 5.11). Однако нетрудно видеть, что если
(они показаны на рис. 5.11). Однако нетрудно видеть, что если  , то вектор
, то вектор  совпадает по направлению с вектором , и в этом случае
совпадает по направлению с вектором , и в этом случае  , т. е. направление оси вращения будет оставаться неизменным без внешнего воздействия.
, т. е. направление оси вращения будет оставаться неизменным без внешнего воздействия.
Наиболее просто убедиться в справедливости можно для случая однородного тела с осевой симметрией. Действительно, момент импульса твердого тела относительно оси вращения  (
( - это проекция вектора , определенного относительно любой точки на этой оси). Но если тело симметрично относительно оси вращения, то из соображения симметрии сразу следует, что векторсовпадает по направлению с вектором и, значит, .
- это проекция вектора , определенного относительно любой точки на этой оси). Но если тело симметрично относительно оси вращения, то из соображения симметрии сразу следует, что векторсовпадает по направлению с вектором и, значит, .
В общем случае (ось вращения не совпадает ни с одной из главных осей, хотя и проходит через центр масс тела) направление вектора не совпадает с вектором , и связь между этими векторами носит сложный характер. Это обстоятельство является причиной сложного поведения вращающихся твердых тел.
– Конец работы –
Эта тема принадлежит разделу:
ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ВРАЩАЮЩЕГОСЯ ТВЕРДОГО ТЕЛА Кинетическая энергия тела равна сумме...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: ДВИЖЕНИЕ ЦЕНТРА МАСС ТВЕРДОГО ТЕЛА
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.022 сек.
Новости и инфо для студентов