рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Тактико-технические характеристики РЛС ГА
Реферат Курсовая Конспект
Тактико-технические характеристики РЛС ГА
Тактико-технические характеристики РЛС ГА - раздел Механика, Трассовые обзорные радиолокаторы ОРЛ-Т (вариант А), с максимальной дальностью действия до 400 км 1.1. Тактические Характеристики Рлс ...
1.1. Тактические характеристики РЛС
Все многообразие характеристик РЛС можно разделить на три группы: тактические, технические и эксплуатационные. В качестве исходных данных при расчете РЛ берутся их тактические показатели. К тактическим характеристикам, определяющим возможности использования РЛС как источника информации, относятся: назначение, зона обнаружения, время обзора зоны; число измеряемых координат и точность их определения; разрешающая способность; помехоустойчивость; объем и количество получаемой дополнительной информации; способ отображения информации.
Зоной обнаружения РЛС (рис.1.1) называют пространство, в пределах которого РЛС обнаруживает цели с определенными отражающими свойствами, с заданными вероятностями правильного обнаружения и ложной тревоги. Зону обнаружения представляют в виде сечений в вертикальной плоскости (Д в) и в горизонтальной (Д г):
 ;
;  ,
,
где  - нормированная ДН антенны;
- нормированная ДН антенны;  - азимутальный угол;
- азимутальный угол;  - угол места; Н – высота расположения цели;
- угол места; Н – высота расположения цели;  - максимальная дальность действия РЛС.
- максимальная дальность действия РЛС.

Рис. 1.1. Зона обнаружения РЛС
В качестве примера приведено вертикальное сечение зоны обнаружения РЛС кругового обзора, которая строится в координатах «наклонная дальность» - «приведенная высота».
Период обзора пространствазависит от многих факторов, в том числе от ширины диаграммы направленности антенны (ДНА) РЛС  , сектора обзора
, сектора обзора  , числа импульсов n, отраженных от цели за время одного обзора, и максимальной дальности действия. Для РЛС кругового обзора он определяется следующим выражением:
, числа импульсов n, отраженных от цели за время одного обзора, и максимальной дальности действия. Для РЛС кругового обзора он определяется следующим выражением:
 , (1.1)
, (1.1)
где  - время, необходимое для того, чтобы антенна повернулась на угол, равный ширине ДН антенны;
- время, необходимое для того, чтобы антенна повернулась на угол, равный ширине ДН антенны;  - период повторения импульсов; n – число импульсов в пачке отраженных сигналов.
- период повторения импульсов; n – число импульсов в пачке отраженных сигналов.
Разрешающая способность РЛС по какому-либо параметру – минимальная разность этих параметров между двумя ВС с одинаковыми остальными координатами и отражающими свойствами, при которых возможно раздельное наблюдение каждого ВС.
Различают разрешающую способность по дальности и угловым координатам. Разрешающая способность по дальности определяется следующим выражением:
 , (1.2)
, (1.2)
где  -масштаб развертки индикатора кругового обзора (ИКО);
-масштаб развертки индикатора кругового обзора (ИКО);  - диаметр светового пятна отметки;
- диаметр светового пятна отметки;  - радиус индикатора кругового обзора (ИКО).
- радиус индикатора кругового обзора (ИКО).
Разрешающая способность РЛС по угловым координатам определяется следующим выражением:
 , (1.3)
, (1.3)
где  - ширина луча по уровню половинной мощности;
- ширина луча по уровню половинной мощности;
Др – расстояние в км от центра экрана до отметки цели.
Помехоустойчивость– это свойство РЛС сохранять тактические показатели при воздействии помех.
Объем и качество получаемой информации – это характеристики, относящиеся к ВРЛ. Объем информации характеризуют числом бит, приходящемся на одно сообщение, а качество – вероятностью ошибки приема одного бита или всего сообщения в целом.
Эксплуатационные характеристики включают в себя показатели надежности, контроле- и ремонтопригодности.
Под надежностью РЛ понимают свойство выполнять заданные функции, сохраняя во времени значения установленных тактических показателей в заданных пределах, соответствующих заданным режимам и условиями использования, обслуживания, хранения и транспортирования. Показателями надежности, определяющими качество функционирования РЛС, являются коэффициенты готовности, оперативной готовности и технического использования. Трудоемкость технического обслуживания и ремонта характеризуют средняя и удельная суммарные трудоемкости, а стоимость – средняя и удельная суммарные стоимости. Показателями ремонтопригодности являются вероятность восстановления РЛС в данное время и среднее время восстановления. Из показателей долговечности в ГА используется назначенный ресурс.
Характеристики РЛС должны сохраняться в заданных климатических условиях, к которым относятся: рабочий диапазон температур и влажности.
1.2. Технические характеристики радиолокационных систем ГА
Технические характеристики РЛС обеспечивают получение заданных тактических и эксплуатационных характеристик. Основными техническими характеристиками являются: длина волны излучаемых колебаний; форма излучаемого сигнала; длительность и частота повторения импульсов; средняя и импульсная мощность излучения; форма и ширина ДН антенны в горизонтальной и вертикальной плоскости; метод обзора зоны; эффективная площадь и коэффициент усиления антенны; чувствительность приёмного устройства; ширина полосы пропускания приёмника; коэффициент шума приёмника; габаритные размеры и масса РЛС.
Методика выбора и расчет технических характеристик приведены в методических указаниях по выполнению курсового проекта.
1.3. Нормы ИКАО на тактико-технические характеристики РЛС
1.3.1. Нормы ИКАО для аэродромных РЛ
Аэродромный радиолокатор SRE, входящий вместе с посадочным радиолокатором PAR в радиолокационную систему управления посадкой по командам с земли GCA, должен удовлетворять следующим нормам, рекомендованным ИКАО.
Аэродромный РЛ должен обнаруживать ВС с ЭПР не менее 15 м2, находящиеся в зоне прямой видимости (из точки расположения антенны) в пределах пространства, охватывающего вращением на 3600 вокруг вертикальной оси плоской фигуры рис. 1.2 (на рис.1.2 сплошная линия). В то же время ИКАО рекомендует увеличить зону обнаружения до размеров, указанных на этом рисунке штриховой линией.
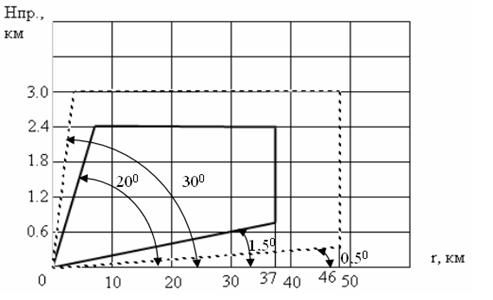
Рис. 1.2. Зона обзора аэродромной РЛС
Погрешность в определении положения отметки цели по азимуту не должна быть больше ±20.
Погрешность индикации дальности не должна превышать 3% от действительного расстояния до цели или 150 м в зависимости от того, какая из этих величин больше.
Разрешающая способность по дальности должна быть не хуже 1% расстояния от антенны РЛ до цели, либо 230 м в зависимости от того, какая из этих величин больше.
Разрешающая способность станции по азимуту должна быть не хуже 40.
Информация о дальности и азимуте любого ВС, находящегося в пределах зоны обнаружения радиолокатора, должна возобновляться не реже, чем каждые 4 с.
1.3.2. Нормы ИКАО для посадочных РЛ
ИКАО установила нормы и рекомендации относительно выбора тактических параметров посадочных радиолокаторов (PAR – precision approach radar). Предполагается, что эти РЛ могут вместе с аэродромными радиолокаторами SRE (surveilance radar equipment) входить в состав системы управления посадкой по командам с земли GCA (ground command approach) или использоваться автономно.
В соответствии с нормами посадочный РЛ должен быть способен обнаруживать и указывать местоположение ВС с эффективной поверхностью рассеяния (ЭПР) 15  или более, которое находится в пространстве, ограниченном сектором по азимуту в 200 и по углу места в 70 на расстоянии не менее 17 км от антенны радиолокатора.
или более, которое находится в пространстве, ограниченном сектором по азимуту в 200 и по углу места в 70 на расстоянии не менее 17 км от антенны радиолокатора.
Допустимая погрешность в определении отклонения ВС от линии курса должна быть либо 0,6% расстояния от антенны посадочного РЛ до цели плюс 10% отклонения его от линии курса, либо 9 м в зависимости от того, какая из этих величин больше.
По углу места максимально допустимая погрешность в определении отклонения ВС от заданной траектории посадки в вертикальной плоскости не должна превосходить 0,4% расстояния от антенны РЛ до цели плюс 10% фактического линейного отклонения по вертикали от траектории посадки либо 6 м в зависимости от того, какая из этих величин больше.
Максимальная погрешность в определении дальности не должна превышать 30 м плюс 3% расстояния от расчетной точки приземления до цели.
Согласно нормам ИКАО разрешающая способность по азимуту должна быть не хуже 1,20, по углу места – 0,60 и по дальности – 120 м.
1.3.3. Нормы ИКАО для ВРЛ
ИКАО установила нормы и выработала ряд рекомендаций на тактические и некоторые технические характеристики вторичных радиолокаторов SSR (secondary suveillance radar).
Для радиолокационных систем с активным ответом устанавливается зона обнаружения, определяемая следующими параметрами: максимальная дальность действия 370 км, минимальная дальность действия 1,85 км, максимальный угол места 450, минимальный угол места 0,50, максимальная высота 30480 м. Зона должна быть обеспечена при любых метеорологических условиях и на всех азимутах.
Запросные сигналы должны посылаться на частотах (1030±0,2) МГц, ответные – на частоте (1090±3) МГц. Поляризация запросных и ответных сигналов должна быть вертикальной.
Сигнал запроса должен состоять из двух импульсов, обозначаемых Р1 и Р3 (рис. 1.3). Дополнительный импульс Р2, предназначенный для подавления сигналов, приходящих с направления боковых лепестков, передается через 2 мкс после Р1.
Рис. 1.3. Структура сигнала запроса при трехимпульсном подавлении
Интервал между импульсами Р1 и Р3 определяет код запроса. Могут использоваться четыре запросных кода: A, B, C и D с кодовыми интервалами 8, 17, 21 и 25 мкс соответственно.
Коды A и B предназначены для опознавания ВС. В ответ на запросы этими кодами бортовой ответчик должен сообщить на землю рейсовый номер ВС.
Запросный код С используется для получения данных о высоте, на которой находится ВС. При запросе этим кодом ответчик передает на землю показания барометрического высотомера, отрегулированного на стандартное давление 760 мм рт. ст. (1,013×105 Па).
Код D зарезервирован для использования в перспективных системах УВД.
Нормы ИКАО предполагают применение двухимпульсных и трехимпульсных систем подавления сигналов боковых лепестков по запросу. При двухимпульсной системе подавления, когда используется сравнение амплитуд импульсов Р1 и Р3, амплитуда Р1 в антенне приемника бортового ответчика должна превышать амплитуду Р3 по крайне мере на 11 дБ для всех азимутальных углов, кроме тех, которые охватываются основным лепестком антенны запросчика.
Для трехимпульсной системы подавления, когда используется сравнение амплитуд импульсов Р1 и Р2, амплитуда импульса Р2 в антенне приемника бортового ответчика должна быть равна или больше амплитуды импульса Р1 для всех направлений, кроме направления главного лепестка запросной антенны. Амплитуда этого же импульса должна иметь уровень на 9 дБ ниже амплитуды импульса Р1 в пределах сектора запроса.
Максимальная частота запросов не должна быть больше 450 Гц.
Для предотвращения ненужных срабатываний ответчиков, находящихся вне установленной зоны управления, эффективная излучающая пиковая мощность импульсов запроса Р1 и Р3 (произведение импульсной мощности на коэффициент усиления антенны) не должна превышать 52,5 дБ по отношению к 1 Вт (180 кВт).
Нормы ИКАО устанавливают требования на структуру ответных кодов, объем и характер передаваемой информации.
Информацию, получаемую с помощью вторичных РЛС, можно условно разделить на две основные части: координатную и дополнительную.
Ответный сигнал состоит из двух крайних опорных импульсов F1 и F2 - координатных, временной интервал между которыми составляет (20,3±0,1) мкс (рис. 1.4).
Рис. 1.4. Структура ответного кода
Между ними расположены 13 кодовых позиций, предназначенных для формирования информационных кодов. Все информационные позиции разбиты на группы A, B, C и D. Каждая из этих групп содержит по три позиции A1, A2, A4; B1, B2, B4 и т.д. При этом группа А передает тысячи, В – сотни, С – десятки, D – единицы номера рейса. Импульсы передаются только для символа “1” младшими разрядами вперед, при нулевом символе импульс отсутствует.
Максимальное число, которое может быть записано таким образом, будет 7777. Поскольку в каждой декаде для передачи десятичных чисел используется только три разряда, передача десятичных цифр 8 и 9 невозможна. Передача данных о высоте производится кодом Гиллхэма.
1.4. Методы защиты приемного тракта РЛС от помех
Достоверность информации о ВС, получаемой в РЛС, можно повысить путем применения методов помехозащиты и обработки результатов измерений.
Методы защиты от помех зависят от вида этих помех. Различают помехи двух видов: шумы приемного устройства РЛС и помехи, создаваемые внешними источниками.
Внешние помехи делятся на активные и пассивные. К активным относятся сигналы, излучаемые соседними радиотехническими средствами, атмосферные и индустриальные помехи, шумы космического пространства. Пассивные помехи – это сигналы, отраженные от подстилающей поверхности, местных предметов, метеообразований и спорадические помехи.
Защита от активных помех может быть организована с помощью следующих устройств: селекции сигналов, защиты приемников РЛС от перегрузок и компенсации радиопомех. Широкое распространение в современных РЛС получают устройства с адаптацией, которые изменяют параметры сигнала или характеристики РЛС таким образом, чтобы в условиях помех данного типа в максимальной степени снижался уровень ложных тревог РЛС.
1.4.1. Селекция сигналов
Различают первичную, вторичную и функциональную селекцию. Существуют следующие виды первичной селекции: пространственная, поляризационная, частотно-фазовая, временная, амплитудная, структурная.
Пространственная селекция осуществляется антенной системой РЛС. Чем уже ДНА и меньше уровень боковых лепестков, тем сильнее подавление мешающих сигналов, выше уровень пространственной селекции.
Для борьбы с пассивными помехами от метеообразований используют поляризационную селекцию. Для реализации метода подавления, основанного на поляризационной селекции, современные РЛС излучают колебания с круговой поляризацией. Капли дождя сохраняют круговую поляризацию, изменяя лишь направление вращения вектора её электрического поля на противоположное. Такой сигнал является ортогональным по отношению к излученному и существенно подавляется в антенно-волноводном тракте. Применение круговой поляризации в РЛС увеличивает отношение сигнал/помеха для слабого дождя на 25...30дБ.
Первичная частотно-фазовая селекция основывается на различии частотно-фазовых характеристик принимаемых сигналов и помех. При этом используются системы частотной и фазовой автоподстройки, позволяющие сузить полосу пропускания приемника, методы оптимальной фильтрации, осуществляющие селекцию на основе различия спектров сигнала и помехи.
К частотной селекции относятся методы, основанные на изменении несущей частоты и частоты следования зондирующих импульсов. Использование зондирования на двух частотах улучшает характеристики обнаружения и уменьшает ошибки измерения угловых координат благодаря усреднению значений ЭПР цели на разных несущих частотах. Изменение периода следования зондирующих импульсов служит в основном для борьбы со «слепыми» скоростями в когерентно-импульсных РЛС.
Устройства временной селекции, осуществляющие сравнение импульсов по длительности, по частоте повторения и по времени их появления позволяют выделить сигналы на фоне импульсных помех.
Устройства с амплитудной селекцией предназначены для борьбы с хаотическими импульсными помехами. Амплитудную селекцию осуществляют методом накопления с помощью некогерентного (последетекторного) накопителя или с помощью систем ограничителей, селектирующих сигнал по его интенсивности на входе приемника.
Структурная селекция основывается на особенностях модуляции сигналов РЛС. Примером её реализации может служить метод сжатия в приемном устройстве импульсных сигналов с частотной модуляцией.
Вторичная селекция связана с контролем сопутствующих сигналов РЛС. Различают частотную, фазовую, временную, амплитудную и структурную вторичные селекции.
Функциональная селекция осуществляется на этапе третичной обработки информации в видеотракте РЛС.
1.4.2. Защита приемников от перегрузок
На входе приемника РЛС присутствуют сигналы и помехи с широким динамическим диапазоном (ШДД) изменения амплитуд порядка 100дБ. В то же время для нормальной работы линейной части приемника динамический диапазон не должен превышать 40дБ. Для согласования ШДД амплитуд входных колебаний с рабочим динамическим диапазоном реальных устройств производят сжатие динамического диапазона обрабатываемых колебаний.
Для защиты от перегрузок приемно-усилительных трактов и индикаторов РЛС используют три метода: регулировку усиления, формирование нелинейной амплитудной характеристикой (АХ) усилительного тракта, применение антенн с ДНА близкой к cosec²φ.
Для борьбы с перегрузкой применяются следующие разновидности систем АРУ: временная (ВАРУ), быстродействующая автоматическая (БАРУ), мгновенная (МАРУ).
Система ВАРУ служит для защиты приемника от перегрузки отражениями от местных предметов и выравнивания яркости отметок от целей, находящихся на различном удалении от РЛС. Кроме того, ВАРУ является одним из основных средств борьбы с помехами типа «ангел», представляющих собой эхо – сигналы от птиц, перемещающихся со скоростью ветра, а также сигналы, обусловленные появлением зон аномального распространения электромагнитных колебаний.
Для стабилизации вероятности ложных тревог осуществляют регулировку усиления в зависимости от уровня шума (ШАРУ).
В РЛС третьего и четвертого поколения применяют устройства сжатия амплитуд входных сигналов, в основе которых лежит обработка отдельных амплитудно-дальностных ячеек, на которые разделена рабочая зона РЛС. Ячейки дальности и азимута, в которых присутствует помеховый сигнал, отраженный от местных предметов или метеообразований, исключается при дальнейшей обработке радиолокационной информации. Так, ослабляя сигнал, поступающий по основному лучу в комбинации с сигналом дополнительного приподнятого луча в РЛС с двулучевой ДНА, можно менять угол приема отраженного сигнала, исключая отражения от местных предметов. Такой способ адаптивного подавления помех позволяет уменьшить уровень мешающих сигналов на 25...30дБ.
1.4.3. Компенсация радиопомех
В импульсных РЛС применяются два основных метода компенсации помех: с помощью вспомогательных приемников и череспериодная компенсация в системе селекции движущихся целей.
Первый метод используется для компенсации помех, действующих по боковым лепесткам ДНА. По основному каналу (рис. 1.5) поступает смесь полезного сигнала с помехой. Вспомогательный канал служит для приема помехи. В результате последующей операции вычитания помехи из выходных колебаний основного канала на выход компенсатора проходят сигналы, отраженные от цели.
Uc+Uп
| |||||||
 |
| ||||||
| |||||||
|
 |
 |
| |||
 | |||
|
|

 Uп
Uп



|


|


|


|
|
|
 |
Рис.1.5. Структурная схема корреляционного автокомпенсатора
Основным средством борьбы с помехами от подстилающей поверхности и местных предметов является система селекции движущихся целей. В основе работы устройств СДЦ лежит эффект смещения несущей частоты сигнала, отраженного от движущегося объекта (эффект Доплера). При этом на практике используется метод фиксации изменения череспериодного вычитания импульсов с неизменной фазой. Сравнение фазовых соотношений зондирующего и отраженного сигналов осуществляется, как правило, на промежуточной частоте. При этом структурная схема системы СДЦ включает фазовый детектор и устройство череспериодной компенсации (ЧПК).
В радиолокаторах, используемых в АС УВД, опорное колебание фазового детектора (Uоп) и зондирующий высокочастотный сигнал обладают истинной внутренней когерентностью, которая позволяет получить высокую степень компенсации пассивных помех.
Работа передающего (ПРД) и приемного (ПРМ) трактов в истинно когерентных радиолокаторах (рис. 1.6) обеспечивается едиными высокостабильными генераторами - задающим (ЗГ) и опорным (ОГ).
 | |||
| |||
Uоп

Рис. 1.6. Упрощенная схема СДЦ в структуре РЛС
Радиолокаторы, в которых фаза опорного колебания синхронизируется принимаемым сигналом, относятся к РЛС с внешней когерентностью. РЛС, в которой фаза опорного колебания синхронизируется начальной фазой высокочастотного заполнения зондирующего импульса, в каждом периоде повторения относятся к классу псевдокогерентных РЛС. Как правило, качественные показатели систем СДЦ в подобных РЛС ниже, чем у истинно
когерентных РЛС.
Наиболее совершенными являются подавители на дискретных цифровых фильтрах. Если последовательность видеоимпульсов пропустить через устройство череспериодного вычитания, т.е. произвести вычитание каждого последующего импульса из предыдущего, то сигналы, отраженные от неподвижных целей, идентичные по структуре, взаимно скомпенсируются и не поступят на дальнейшую обработку. Система СДЦ (схема ЧПК) представляет собой режекторный- гребенчатый фильтр, частотная характеристика которого (рис. 1.7) имеет провалы в окрестностях частот, кратных частоте повторения импульсов.
Спектральные линии радиоимпульсов, отраженных от неподвижных предметов, совпадают с положением нулей АЧХ фильтра, и такой сигнал подавляется. Так как частотные интервалы между спектральными составляющими радиоимпульсов, отражаемых от движущихся объектов, имеют
доплеровское смещение частоты 2Vр/λ, где Vр – радиальная скорость движения цели, то такой сигнал ЧПК не подавляется.

Рис. 1.7. Амплитудно-частотная характеристика системы ЧПК
При определенной радиальной скорости цели Vр=Vсл фаза высокочастотного отраженного сигнала за время Т может измениться на 360°.
В этом случае сигнал будет подавлен аналогично сигналу от неподвижного объекта. Скорости Vсл носят название «слепых» скоростей и определяются как
Vсл=nλ/ Тп,
где n –целое число.
Среди известных методов уменьшения числа «слепых» скоростей в пределах рабочего диапазона радиальных скоростей цели наибольшее распространение получил способ вобуляции частоты, то есть изменения периода повторения зондирующих импульсов. Далее рассмотрим принцип построения радиолокационных станций УВД, находящихся в настоящее время на эксплуатации.
– Конец работы –
Эта тема принадлежит разделу:
Трассовые обзорные радиолокаторы ОРЛ-Т (вариант А), с максимальной дальностью действия до 400 км
Современный этап развития гражданской авиации характеризуется широким внедрением автоматизированных систем управления воздушным движением АС УВД... В условиях высокой интенсивности и плотности воздушного движения особую... Среди радиотехнических средств обеспечения полетов особое место занимают радиолокационные станции РЛС поскольку...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Тактико-технические характеристики РЛС ГА
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.043 сек.
Новости и инфо для студентов