рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Радиолокационные системы управления воздушным движением
Реферат Курсовая Конспект
Радиолокационные системы управления воздушным движением
Радиолокационные системы управления воздушным движением - раздел Механика, Трассовые обзорные радиолокаторы ОРЛ-Т (вариант А), с максимальной дальностью действия до 400 км 2.1. Первичные Трассовые Рлс ...
2.1. Первичные трассовые РЛС
 Главное требование, которое предъявляется к РЛС и РЛК - обеспечение стабильного уровня ложных тревог на выходе РЛС. Это требование выполняется благодаря адаптивным свойствам этих РЛС, в которых осуществляется анализ помеховой обстановки и автоматическое управление режимом работы РЛС.
Главное требование, которое предъявляется к РЛС и РЛК - обеспечение стабильного уровня ложных тревог на выходе РЛС. Это требование выполняется благодаря адаптивным свойствам этих РЛС, в которых осуществляется анализ помеховой обстановки и автоматическое управление режимом работы РЛС.
Особенностями построения трассовых РЛС являются:
- применение цифровой системы СДЦ (коэффициент подавления помех от местных предметов до 40…45 дБ и коэффициент подпомеховой видимости до 28…32 дБ);
- применение переменного периода повторения зондирующего сигнала (вобуляция частоты) для борьбы с помехами от целей, удалённых от РЛС на расстояние, превышающее максимальную дальность действия РЛС, и для борьбы со «слепыми» скоростями;
- обеспечение линейной АХ приёмного тракта до входа системы СДЦ с динамическим диапазоном по входному сигналу до 90…110 дБ и динамическим диапазоном системы СДЦ до 40 дБ;
- применение автоматического управления положением нижней кромки зоны обзора РЛС в вертикальной плоскости благодаря использованию двухлучевой ДНА и формированию взвешенной суммы сигналов верхнего и нижнего лучей.
Существует несколько вариантов построения структурной схемы первичной трассовой РЛС. В качестве примеров схемных решений выбраны РЛС «Скала-М», «Скала-МПА», «Скала-МПР», Лира 1. Главными особенностями структурной схемы рис. 2.1 первичной импульсной РЛС кругового обзора являются: применение двух приемопередающих каналов с разносом частот; использование двухлучевой ДНА в вертикальной плоскости; применение истинно-когерентного метода СДЦ.
Первая особенность РЛС связана с применением одного из методов повышения её энергетического потенциала – метода разноса частот. Два передатчика А и В работают одновременно на общую антенну в режиме импульсной модуляции с различными несущими частотами fA и fB зондирующих импульсов, временной сдвиг между которыми составляет обычно 4…6 мкс, разнос по частоте 40…60 МГц.

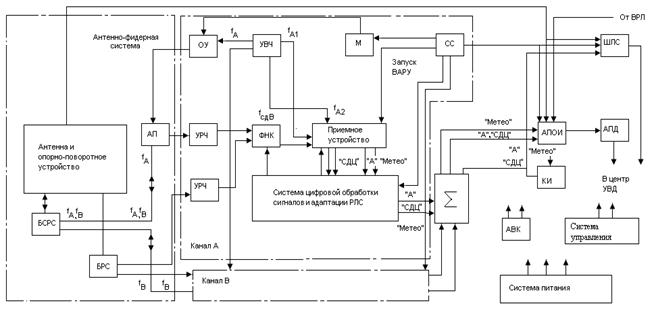
Отраженные от цели сигналы с разными частотами разделяются с помощью СВЧ фильтров и усиливаются двумя приемными каналами А и В, настроенными на соответствующие частоты. После детектирования видеосигналы каналов А и В объединяются и далее обрабатываются совместно.
Преимуществами двухчастотной схемы построения РЛС перед одночастотной РЛС являются: увеличение суммарной мощности излучения РЛС при наличии ограничений мощности отдельного передатчика; увеличении дальности обнаружения и точности измерения координат; увеличения надежности работы РЛС и её помехозащищенности по отношению к помехам искусственного и естественного происхождения.
 Увеличение дальности обнаружения и точности измерения координат объясняется тем, что диаграмма переотражений сложных целей на разных частотах имеет провалы на различных углах визирования. Поэтому сумма выходных напряжений в двухканальной РЛС имеет значительно меньше флуктуаций амплитуды, чем в случае приема сигналов от целей на одной частоте. В некоторых типах РЛС зона обнаружения в вертикальной плоскости (рис. 2.2) формируется с учетом применения локальной обработки принимаемых сигналов.
Увеличение дальности обнаружения и точности измерения координат объясняется тем, что диаграмма переотражений сложных целей на разных частотах имеет провалы на различных углах визирования. Поэтому сумма выходных напряжений в двухканальной РЛС имеет значительно меньше флуктуаций амплитуды, чем в случае приема сигналов от целей на одной частоте. В некоторых типах РЛС зона обнаружения в вертикальной плоскости (рис. 2.2) формируется с учетом применения локальной обработки принимаемых сигналов.

Рис. 2.2. Принцип формирования зоны обнаружения трассовой РЛС
в вертикальной плоскости:
K1 – верхняя граница использования сигналов дополнительного луча 2, обработанных в системе СДЦ (Доп. СДЦ); K2 – верхняя граница использования сигналов основного луча 1, обработанных с системе СДЦ (Осн. СДЦ); A – верхняя граница использования сигналов дополнительного луча 2, не обработанных в системе СДЦ (Доп. А); Dmax – максимальная дальность действия РЛС, являющаяся верхней границей использования необработанных в системе СДЦ сигналов основного луча 1 (Осн. А)
Вся зона обнаружения по дальности трассовой РЛС разбивается на четыре участка (I…IV). Границы участков задаются по программе в зависимости от конкретных условий размещения РЛС. Данный принцип формирования зоны обнаружения позволяет: получить максимальное подавление помех от местных предметов на начальном участке дальности 1; свести к минимуму область воздушного пространства, где используется сумма сигналов Осн. СДЦ и Доп. СДЦ, и тем самым уменьшить влияние скоростной характеристики системы СДЦ (участок II). При наличии помех типа «ангел» целесообразно использовать сигнал дополнительного луча (участок III при K2 <А). После предварительного анализа помеховой обстановки и задания границ K1, K2 и А между 4 участками дальности зоны обнаружения, структура РЛС приобретает фиксированную конфигурацию и не меняется в процессе работы РЛС.
В других современных РЛС применяется более гибкий подход к формированию зоны обнаружения, реализующий идею динамической адаптации РЛС к помеховой обстановке. При этом вся зона обнаружения по дальности разбивается на два равных участка. Участок I,. для которого характерно наибольшее влияние помех от местных предметов, разбивается на элементарные зоны по азимуту 5,6º (64 сектора), а по дальности - на 16 участков. В результате вся зона обзора в горизонтальной плоскости в пределах первой половины максимальной дальности действия РЛС получается разбитой на 16 · 64 = 1024 ячейки. В течение рабочего цикла, равного трем периодам обзора, осуществляется анализ помеховой обстановки и в специальном запоминающем устройстве РЛС формируется текущая карта помех, содержащая информацию об уровне помех в каждой из 1024 ячеек. На основе этой информации производится выбор весовых коэффициентов для формирования взвешенной суммы сигналов, принятых по основному и дополнительному лучам ДНА, для каждой из этих ячеек в отдельности.
В результате зона обнаружения РЛС в вертикальной плоскости приобретает сложную конфигурацию: нижняя кромка зоны обнаружения в разных ячейках имеет различный наклон (-0,5; 0,1; 0,5 или 1º). На второй половине дальности (участок II) используется только сигнал, принимаемый по основному лучу.
Отраженные от цели радиоимпульсы с несущей частотой fA, принимаемые по основному лучу ДНА, через БСРС, АП и малошумящий УРЧ поступают на один из входов формирователя нижней кромки ФНК. Радиоимпульсы с той же частотой fA, принимаемые по дополнительному лучу ДНА, через блок разделения БРС и УРЧ поступают на второй вход ФНК. На выходе ФНК в результате весового суммирования сигналов основного и дополнительного лучей образуют суммарный сигнал, который поступает на вход приемника РЛС. В приемном устройстве осуществляется преобразование частоты, усиление и частотная селекция сигнала и далее его детектирование. Видеосигнал А с выхода АД поступает в систему цифровой обработки, минуя СДЦ, а видеосигнал СДЦ с выхода ФД поступает на вход СДЦ, входящий в состав системы цифровой обработки сигналов.
Для обеспечения постоянной разности частот fA и fB используется специальный генератор сдвига частот.
Цифровая часть РЛС начинается со входа системы цифровой обработки сигналов и адаптации РЛС. Главными функциями этой системы являются: очистка принимаемого сигнала от различного рода помех; анализ текущей помеховой обстановки и автоматическое управление режимами работы РЛС (функция адаптации). Входные сигналы «А», «СДЦ» и «Метео», поступающие с выхода приемника, преобразуются в цифровую форму.
Первая функция системы обработки реализуется с помощью следующих цифровых устройств: устройства ЧПК системы СДЦ; видеокоррелятора для подавления несинхронных помех и отраженных сигналов предыдущего периода зондирования; устройства Лог – МПВ – Антилог, служащего для выделения полезного сигнала на фоне помех от протяженных по дальности и азимуту целей (метеообразования); устройства выделения сигналов для получения информации о контурах метеообразований.
При выполнении второй функции системы обработки используются следующие устройства: устройство секторизации для разделения зоны обзора на ячейки и распределения памяти системы; картограф помех для формирования динамической карты помех; анализаторы параметров принимаемых сигналов; управляющие устройства для формирования сигналов управления режимами работы и параметрами РЛС. Устройство, обозначенное на рис. 2.1 как Σ, осуществляет объединение сигналов двух частотных каналов РЛС.
Рассмотрим работу одного канала РЛС (рис. 2.1). Система синхронизации СС вырабатывает импульсы запуска, которые поступают на вход модулятора М передающего устройства. Модулятор М под воздействием импульсов запуска вырабатывает мощные модулирующие импульсы, поступающие на оконечный усилитель ОУ передатчика РЛС. Генератор радиочастот ГРЧ генерирует непрерывные гармонические колебания с частотой fA, которые усиливаются в ОУ и модулируются по амплитуде М. В результате на выходе ОУ формируется последовательность когерентных импульсов с несущей частотой fA и прямоугольной огибающей. Эти радиоимпульсы через антенный переключатель АП и блок сложения мощностей и разделения сигналов (БСРС) поступают в антенное устройство РЛС и излучаются антенной.
С выхода этого устройства в АПОИ передаются два объединенных сигнала «А» (или «СДЦ») и «метео». В РЛС, не содержащих собственной АПОИ, эти сигналы преобразуются с помощью ЦАП в аналоговую форму и передаются на входы АПОИ, сопрягаемой с РЛС, на контрольный индикатор (КИ) и широкополосную линию связи ШЛС.
Аппаратура первичной обработки информации (АПОИ) обычно представляет собой универсальную аппаратуру, сопрягаемую с различными типами РЛС. В этой аппаратуре осуществляются операции обнаружения сигналов воздушных целей и измерения их координат, а также объединение информации первичной РЛС с информацией вторичного радиолокатора. С выхода АПОИ радиолокационная информация в цифровом виде транслируется в центр УВД с помощью узкополосной аппаратуры передачи данных АПД.
Важной особенностью современных трассовых РЛС является использование системы автоматического встроенного контроля (АВК).
Тактико-технические характеристики трассовой РЛС
Дальность действия при нулевых углах закрытия, км, по самолету типа:
- Ту-144 при Нпол=13…20 км…………………………………………400
- Ту-154, Ил-62 при Нпол=10 км………………………………………340
- Ил-18 при Нпол=6 км…………………………………………………250
Минимальная дальность действия, км……………………………………..12
Зона обзора в вертикальной плоскости, градус:
- верхний угол места, не менее………………………………………45
- нижний угол места, не более………………………………………0,5
Вероятность правильного обнаружения при вероятности ложных
тревог не более 10-6………………………………………………………...0,8
Средняя квадратическая погрешность на выходе АПОИ:
- по дальности, м, не более …………………………………………300
- по азимуту,с, не более ……………………………………………….8
Разрешающая способность:
- на выходе АПОИ:
- по дальности, м, не более ……………………………………….…650
- по азимуту,градус, не более ……………………………………..….2
Коэффициент подпомеховой видимости на фоне помех от местных предметов при вращающейся антенне, дБ:
- при двухкратном череспериодном вычитании ……………………..18
- при трехкратном череспериодном вычитании …………………….24
Коэффициент подавления помех от местных предметов, дБ, не менее …42
Коэффициент подавления помех от метеообразований, дБ……………..18
Наличие встроенного вторичного радиолокационного канала ……..Есть
Темп обновления и выдачи информации, с …………..…………….10 и 20
Число направлений передачи информации в цифровом виде
по стандартным телефонным каналам………………………………………3
Возможность выдачи информации:
- в аналоговом виде по широкополосной линии (кабелю) на расстояние до 5 км. …………………..…………………………………..Есть
- о границах метеообразований (в двух градациях)……….…..Есть
Полное время включения, мин, не более ……………………...…………..12
Среднее время наработки на отказ, ч ………………………………..….1100
Среднее время восстановления, мин …………………………………...….25
Потребляемая мощность по первичной сети электропитания 380 В, 50 Гц, кВт, не более …………………………………………………………….…150
Рабочая длина волны, см …………………………………………………...23
Разнос каналов А и В по частоте, МГц………………………………….....56
Габаритные размеры отражателя антенны, м ……………………….10,5×15
Ширина ДНА в горизонтальной плоскости по уровню 3 дБ, градус
- нижнего луча и верхнего луча………………………………….1,1±0,1
Коэффициент усиления антенны, дБ:
- по нижнему лучу и верхнему……………………………………….36
Уровень боковых лепестков антенны, дБ:
- по нижнему лучу и верхнему………………………………………-20
Потери в радиопрозрачном укрытии антенны, дБ…………………..……1,7
Возможность управления поляризацией от линейной до круговой (плавно):
- в канале нижнего луча …………………………………..………Есть
- в канале верхнего луча…………………………Нет (только круговая)
Длительность зондирующего импульса, мкс ………………………..3,3±0,3
Средняя частота повторения импульсов, Гц…………..…………………333
Изменение периода повторения импульсов………………….…………Есть
Импульсная мощность передатчика, МВт, не менее………….………….3,6
Коэффициент шума приемника, дБ, не более…………………..…………4,8
Промежуточная частота, МГц ………………………………………...……35
Ширина полосы пропускания приемника на промежуточной
частоте, МГц……………………………………………………………...6±0,1
Динамический диапазон системы цифровой обработки сигналов и адаптации, дБ:
- по амплитудному каналу, не менее ……….………………….……18
- по каналу СДЦ, не менее……………………………………..………42
Характеристики квадратурной цифровой системы СДЦ:
- кратность череспериодного вычитания …………………….……2 и 3
- коэффициент подавления помех, дБ, не менее ……………………42
- дальность действия, км ……………………………………………390
Остановимся более подробно на особенностях построения отдельных узлов первичной трассовой РЛС.
2.1.1. Антенно-фидерная система трассовой РЛС
Антенно-фидерная система (АФС) первичного радиолокатора предназначена для передачи высокочастотной энергии от двух передающих устройств к вращающейся антенне излучения зондирующих сигналов в соответствии с требуемой зоной обнаружения и передачи принятых радиолокационных сигналов от антенны к соответствующим приёмным устройствам РЛС.
В состав АФС входят антенное устройство, волноводно-коаксиальный тракт опорно-поворотного устройства (ОПУ) и основной волноводный тракт.
Антенна представляет собой зеркальную систему с отражателем двойной кривизны и рупорным облучателем. ДНА по основному и дополнительному лучам имеет форму, близкую к форме типа cosec². В азимутальной плоскости ДНА является узконаправленной, а её ширина по одному лучу составляет (1,1±0,1)°.
Для формирования двухлучевой ДНА в антенном устройстве и волноводно-коаксиальном тракте применяются идентичные рупорные облучатели основного (ООК) и дополнительного (ОДК) каналов(146´306´660 мм). В тракте ОК используется устройство управления поляризацией (УУП), предназначенное для ослабления сигналов, отражённых от метеообразований, и обеспечивает оперативную установку любого вида поляризации. Поляризационное устройство ПУ дополнительного канала позволяет установить только одну из круговых поляризаций – левую или правую.
Радиопрозрачное укрытие (РПУ) обеспечивает защиту антенны от влияния метеофакторов и позволяет снизить аэродинамическую нагрузку на антенну.
В состав волноводно-коаксиального тракта ОПУ входят вращающиеся сочленения основного канала (ВСОК) и дополнительного канала (ВСДК).
Основной волноводный тракт выполняет следующие функции:
-объединение сигналов двух передатчиков, работающих на различных частотах fА и fВ;
- распределение принимаемых сигналов с несущими частотами fА и fВ, поступающих по основному и дополнительному лучам ДНА, между соответствующими входами приёмного тракта РЛС;
- переключение режимов передачи и приёма сигналов;
- согласование волноводного тракта с передающими устройствами и обеспечение необходимой развязки между двумя частотными каналами РЛС;
- выдачу сигналов в систему контроля параметров РЛС.
Электрическая прочность тракта обеспечивается при импульсной мощности зондирующего сигнала не более 4 МВт.
Высокочастотные колебания с выхода оконечного усилителя передающего устройства поступают в измеритель проходящей мощности (ИПМ). После ИПМ сигнал передатчика проходит последовательно вентиль (В), блок направленных ответвителей (БНО), устройство контроля согласования (УКС), антенный переключатель (АП), устройство ввода затухания (УВЗ), СВЧ фильтр (Ф) и поступает на один из входов блока сложения мощностей и разделения сигналов (БСРС).
Блок направленных ответвителей служит для отвода небольшой части ВЧ энергии и передачи её к контрольно-измерительным приборам для проверки формы огибающей и спектра зондирующего сигнала. Устройство контроля согласования (УКС) осуществляет непрерывный контроль коэффициента стоячей волны. При КСВ³3 это устройство вырабатывает сигнал световой сигнализации «Авария тракта В».
Антенный переключатель выполнен по схеме с газовыми разрядниками. Устройство ввода затухания (УВЗ) позволяет вводить в тракт дополнительное затухание при неработающем передатчике (например, при ремонте и т. д.)
Фильтр (Ф) является заградительным для сигнала с частотой fА<fВ и представляет собой зауженный по широкой стенке волновод со ступенчатыми переходами к нормальному сечению.
Блок сложения и разделения сигналов БСРС служит для сложения мощностей сигналов с частотами fА и fВ при передаче и разделении сигналов с такими частотами при приёме.
В АФС РЛК “Скала – МПР” предусмотрена работа в двухчастотном режиме при взаимно ортогональных поляризациях сигналов, излучаемых на разных частотах fА и fВ. Это обеспечивает дополнительное сглаживание амплитудных флюктуаций суммарного отражённого сигнала и увеличивает максимальную дальность действия РЛС.
2.1.2. Передающее устройство РЛС
В импульсных РЛС применяются передатчики, выполненные по одно- или многокаскадной схеме. В первом случае в качестве оконечного устройства используют магнетрон. Эти передатчики просты, надёжны и имеют большой КПД. Однако невысокая стабильность частоты и фазы генерируемых колебаний не позволяет реализовать систему СДЦ с высокими характеристиками. Каждый передатчик (рис. 2.3) предназначен для генерирования сигналов на одной из несущих частот, а также для формирования вспомогательных колебаний: сигнала гетеродинной частоты и сигнала опорной промежуточной частоты (для работы фазового детектора в системе СДЦ).
Рассмотрим принцип действия одного из каналов передающего устройства РЛС. Задающий генератор генерирует три сигнала: сигнал гетеродинной частоты; сигнал опорной промежуточной частоты (35МГц) и
импульсно-модулированный сигнал промежуточной частоты.
Рис. 2.3. Структурная схема передающего устройства двухчастотной РЛС (один частотный канал):
КГ – кварцевый генератор; КС – ключевая схема; ИВН – источник высокого напряжения; СУУ – смесительно-усилительное устройство; М – модулятор последовательности когерентных радиоимпульсов СВЧ
Сигнал частоты гетеродина поступает на один из входов смесительно–усилительного устройства (СУУ); на второй вход СУУ подаётся импульсно-модулированный сигнал суммарной частоты fс=fг+fпр., который выделяется колебательной системой второго каскада ССУ, усиливается в последующих каскадах СУУ и передаётся в оконечный усилитель передатчика.. Импульсы модуляции длительностью 3,3 мкс для оконечного усилителя формируются импульсным модулятором. На выходе оконечного усилителя формируется последовательность радиоимпульсов длительностью 3,3мкс при средней мощности сигнала 3,6 кВт, которая передаётся в АФС РЛС.
2.1.3. Приемный канал трассовой РЛС
Тракт приема и обработки сигналов можно условно разделить на аналоговую и цифровую части.
Приемная аппаратура двухчастотной импульсной РЛС (рис. 2.4) включает в себя аналоговую часть тракта приема и обработки сигналов и цифровую. Приемники состоит из двух приемных устройств, отличающихся друг от друга несущей частотой принимаемых сигналов. Каждое приемное устройство конструктивно объединяется с соответствующим передающим устройством, составляя таким образом приемопередающий модуль первичной РЛС.
Основными функциями приемного устройства РЛС с применением двухлучевой диаграммы направленности антенны являются: усиление принятых АФС сигналов, преобразование частоты, частотная селекция, детектирование этих сигналов, стабилизация уровня ложных тревог, сжатие динамического диапазона принятых сигналов и формирование сигналов для выделения границ метеообразований.
Приемные устройства выполняются по супергетеродинной схеме с УРЧ, однократным преобразованием частоты и имеют на выходе амплитудный и фазовый детекторы. Таким образом, на выходе приемного устройства формируются два основных вида сигналов: амплитудный – с выхода АД и сигнал промежуточной частоты – с выхода предпоследнего каскада УПЧ.
Приемные устройства РЛС с двухлучевой ДНА можно разделить по способу объединения сигналов, принятых по разным лучам, на группы с объединением на видеочастоте и на высокой частоте. Приемное устройство первой группы содержит два приемных канала, предназначенных для раздельного приема сигналов основного и дополнительного лучей ДНА. Приемные устройства второй группы являются одноканальными и предназначены для приема объединенного сигнала. Однако в этом случае требуется радиочастотное устройство объединения сигналов ФНК, которое включается в приемный тракт между УРЧ и преселектором приемного устройства.
В приемном устройстве первой группы основной (ОК) и дополнительный (ДК) каналы приемного устройства одинаковы. Рассмотрим их принцип действия на примере ОК (рис. 2.4). Принятый по основному лучу ДНА сигнал с выхода АП АФС через направленный ответвитель (НО) и высокочастотное согласующее устройство (СУ) поступает на вход малошумящего УРЧ, усиливается и через фильтр-преселектор поступает на сигнальный вход смесителя (СМ). На гетеродинный вход СМ подаются непрерывные колебания гетеродинной частоты fг от соответствующего частотного канала передающего устройства.
После преобразования частоты в смесителе принятый сигнал усиливается в тракте ПЧ с помощью предварительного и основного усилителей ПЧ (ПУПЧ и УПЧ).
Эти усилители настроены на частоту fпр=35 МГц. С выхода УПЧ сигнал ПЧ поступает в два подканала, имеющие разные амплитудные характеристики.
В подканале АД с линейной АЧХ осуществляется амплитудное детектирование сигнала. Этот подканал используется при формировании зоны обзора РЛС на участке дальности III и IV, т.е. в дальней зоне действия РЛС, и при условии отсутствия помех от мощных метеообразований.
Подканал ЛОГ-МПВ-АнтиЛОГ представляет собой устройство защиты от помех, обусловленных мощными метеообразованиями, влияние которых не компенсируется полностью с помощью поляризационной селекции и системы СДЦ. Этот подканал состоит из УПЧ с логарифмической АХ (ЛОГ), осуществляющего наряду с усилением амплитудное детектирование сигнала, устройство малой постоянной времени (МПВ) и видеоусилителя с антилогарифмической АХ (АнтиЛОГ).

Устройство ЛОГ-МПВ-АнтиЛОГ обеспечивает сжатие динамического диапазона входного сигнала, селекцию по длительности полезного импульсного сигнала, имеющего малую длительность по сравнению с импульсами помехи от метеообразований и частичное восстановление динамического диапазона выделенного полезного сигнала, видеосигналов, полученных от одной цели при двухчастотном режиме работы РЛС. УЗК амплитудный сигнал ОК через видеоусилитель (ВУ) поступает на выход приемного устройства и передается далее в устройство объединения сигналов двух частотных каналов РЛС.
Кроме того, с выхода усилителя ЛОГ через видеоусилитель ВУ на выход приемного устройства выводится видеосигнал “Метео-А”, который передается в устройство выделения контуров мощных метеообразований. Приемный тракт ОК, включающий усилитель ЛОГ и выходной видеоусилитель ВУ, представляет собой приемную часть метеоканалов РЛС.
Выходной сигнал промежуточной частоты СДЦ (ПЧ) приемного устройства формируется с помощью коммутатора К. Для этого сигналы ПЧ с выходов промежуточных каскадов УПЧ ОК и ДК подаются на два входа коммутатора. Последний коммутирует входные сигналы таким образом, что на его выходе присутствует только сигнал ПЧ ДК для ближней зоны действия РЛС, а для дальней зоны – только сигнал ПЧ ОК. Выходной сигнал коммутатора СДЦ (ПЧ) по высокочастотному кабелю передается в блок ФД системы СДЦ, в котором наряду с фазовым дететированием осуществляется объединение сигналов СДЦ (ПЧ) двух частотных каналов РЛС.
Для сжатия динамического диапазона сигналов, отраженных от целей на малых дальностях, применяется ВАРУ, регулирующее напряжение которой подается на каскады ПУПЧ.
С целью стабилизации уровня ложных тревог на выходе РЛС применяется ШАРУ.
Если имеющиеся средства защиты от помех не обеспечивают полного подавления помех от местных предметов и метеообразований, используется локальная регулировка усиления (ЛРУ), осуществляющаяся оператором. Устройствами приемной аппаратуры, обеспечивающими адаптивные свойства РЛС, являются формирователь нижней кромки зоны обнаружения и адаптивный аттенюатор помех (ААП). Каждое из этих устройств состоит из управляющей (цифровой) и исполнительной (аналоговой) частей.
В первичных РЛС применяется цифровая система СДЦ, использующая истинную внутреннюю когерентность принимаемого и опорного сигналов, два квадратурных канала и двукратное или трехкратное череспериодное вычитание.
Основные технические характеристики ЦСДЦ: зона действия по дальности 7…397 км; число элементов по дальности 960; длительность интервала временной дискретизации 2,7 мкс; число разрядов 8; коэффициент подавления помех не менее 40 дБ.
В двухканальной схеме ЧПВ обрабатывается только один из входных сигналов СДЦ (ПЧ1) или СДЦ (ПЧ2). Фазовое детектирование этих сигналов осуществляется независимо с помощью двух схем квадратурного фазового детектирования. Каждая схема состоит из двух фазовых детекторов ФД1, ФД2 и фазовращателя ФВ (рис. 2.5).
 |
Рис. 2.5. Схема квадратурного фазового детектирования
Выбор дальнейшей обработки пары видеосигналов производится с помощью коммутатора К. Эти сигналы подаются на входы двух идентичных каналов схемы ЧПВ, в каждом из которых осуществляются операции двух или трехкратного ЧПВ в цифровой форме. Важным преимуществом ЦСДЦ с двумя квадратурными каналами является практически полное устранение провалов чувствительности системы СДЦ при значениях фазового сдвига, соответствующего слепым скоростям.
Благодаря сдвигу фаз на 900 опорных колебаний, подаваемых на ФД1 и ФД2 в схеме квадратурного фазового детектирования (рис. 2.5), зонам “слепых” фаз в канале ФД1 всегда соответствуют зоны максимальной чувствительности системы СДЦ в канале ФД2, и наоборот. На вход канала ЧПВ поступает аналоговый видеосигнал с выхода фазового детектора.
2.1.4. Устройства адаптации первичной трассовой РЛС
Формирователь нижней кромки является высокочастотным устройством объединения сигналов, принимаемых по двум лучам ДНА, и служит для уменьшения уровня помех от местных предметов на входе приемного устройства (на 20 дБ).

Рис. 2.6. Принцип действия формирователя нижней кромки зоны обзора
в вертикальной плоскости
Работа ФНК (рис. 2.6) основана на использовании цифровой карты помех, которая формируется в системе цифровой обработки сигналов и адаптации РЛС. Карта помех для ФНК составляется в управляющей части этого устройства. Принимаемый сигнал с выхода УПЧ приемного устройства поступает в управляющую часть ФНК для анализа и оценки текущего уровня помех в каждой ячейке отдельно. В анализаторе помех производится детектирование сигнала и сравнение с каждым из четырех установленных пороговых уровней. Результат сравнения для каждой ячейки зоны обнаружения записывается в виде двухразрядного двоичного кода и в соответствующей ячейке запоминающего устройства (ЗУ). На основе информации, записанной в ЗУ, формируется код управляющего сигнала, соответствующий одному из четырех состояний помеховой обстановки, который передается в исполнительную часть ФНК.
В исполнительной части ФНК осуществляется объединение высокочастотных сигналов основного и дополнительного каналов приема. При этом в каждой ячейке зоны действия ФНК одна из четырех возможных комбинаций этих сигналов формируется с помощью суммирующего устройства (СУ) и регулируемых аттенюатора (Ат) и фазовращателя (Фв), на которые поступают управляющие сигналы от распределителя ФНК. Устройство фазирования (УФ) обеспечивает начальное фазирование сигнала ДК в зависимости от использованного вида поляризации (линейной или круговой).
Распределитель ФНК выполняет функцию согласования аналоговой и цифровой частей ФНК.
Программа адаптации реализуется в течение трех периодов обзора РЛС, составляющих рабочий цикл ФНК.
Если для компенсации помех используется секторизация области обзора, то в структуре РЛС используется адаптивный аттенюатор помех (ААП), представляющий собой многокаскадный УПЧ (рис. 2.7), коэффициент усиления которого регулируется по ступенчатому закону.

Рис. 2.7. Принцип действия адаптивного аттенюатора помех
Это достигается поочередным исключением из линейки каскадов УПЧ нескольких каскадов, начиная с последнего каскада. Данное устройство является адаптивным и автоматически приспосабливается к непрерывно изменяющейся помеховой обстановке. Работа ААП также основана на использовании цифровой карты помех. Принимаемый сигнал снимается с выходов трех последних звеньев УПЧ и поступает в управляющую часть ААП для анализа и оценки текущего уровня помех в каждой ячейке отдельно.
В анализаторе помех, состоящем из параллельных каналов, производится детектирование каждого из трех входных сигналов и сравнение с установленным пороговым уровнем, одинаковым для всех каналов. Этот уровень соответствует допустимому превышению помехами уровня собственных шумов на выходе приемного устройства.
В исполнительной части ААП при воздействии определенного управляющего сигнала открывается только один из вентилей В1…В4, через который на вход суммирующего устройства (СУ) поступает сигнал ПЧ с выхода последнего звена УПЧ, где еще не превышен установленный пороговый уровень.
2.1.5. Система синхронизации и формирования меток азимута
первичной трассовой РЛС
Главными функциями системы синхронизации и формирования меток азимута являются: обеспечение синхронной работы основных частей радиолокационного комплекса (первичной РЛС, вторичной РЛС и АПОИ); синхронизация оборудования первичной РЛС; формирование сигналов временной шкалы (меток дальности) и сигналов шкалы азимута.
В современных РЛС с применением цифровых систем обработки сигналов эти требования выполняются благодаря использованию специальных устройств формирования опорных сигналов – цифровых синтезаторов сетки частот, обеспечивающих привязку всех опорных частот к частоте одного высокостабильного источника колебаний.
В системе синхронизации и формирования меток азимута можно выделить два относительно самостоятельных устройства: синхронизации и формирования азимутальных меток.
Центральным узлом устройства синхронизации является генератор опорной частоты  кГц, стабилизированный кварцем. Частота
кГц, стабилизированный кварцем. Частота  выбирается из расчета формирования заданного минимального деления шкалы дальности
выбирается из расчета формирования заданного минимального деления шкалы дальности  км. Для получения такой шкалы производится деление частоты на 22. При последующем делении частоты на 10, 100 и т.д. формируются другие метки дальности ( 5, 50 км и т.д.).
км. Для получения такой шкалы производится деление частоты на 22. При последующем делении частоты на 10, 100 и т.д. формируются другие метки дальности ( 5, 50 км и т.д.).
К числу основных узлов устройства синхронизации относятся: формирователь импульсов синхронизации и меток дальности (для ВРЛ и АПОИ, ШАРУ, ВАРУ и формирования нуля дальности); формирователь вобулированных сигналов запуска (вобулятор); блок встроенного контроля работоспособности устройства синхронизации.
Устройство формирования азимутальных меток предназначено для формирования азимутальных меток  ,
, , импульсов «Север» и малых азимутальных импульсов (МАИ) из сигналов, поступающих с антенных датчиков.
, импульсов «Север» и малых азимутальных импульсов (МАИ) из сигналов, поступающих с антенных датчиков.
В блоке датчиков азимута за один оборот антенны формируется 4096 импульсов «МАИ» и один импульс «Север». В формировании азимутальных меток из импульсов «МАИ» с помощью шестиразрядного счетчика, схемы выделения и делителей вырабатываются импульсы ,  и , поступающие в схему синхронизации.
и , поступающие в схему синхронизации.
2.1.6. Аппаратура управления, контроля и трансляции
Аппаратура управления и контроля первичной РЛС выполняет следующие функции: включение с пульта управления РЛС всего оборудования по определенной программе; местное переключение аппаратуры РЛС из режима «Работа» в режим «Ремонт» и обратно; передачу в районный центр УВД сигналов технического состояния аппаратуры РЛС; автоматическое или ручное переключение с рабочего комплекта на резервный; защиту аппаратуры РЛС при возникновении аварийных режимов.
Аппаратуру автоматического встроенного контроля (АВК) можно разделить на АВК для контроля аналоговых устройств и контроля цифровых устройств РЛС. При контроле работоспособности аналоговых устройств РЛС используются измерители проходящей мощности, генератор шума для контроля чувствительности приемных устройств.
При автоматическом встроенном контроле работоспособности цифровых устройств используется несколько способов, которые основаны на применении тест - сигналов.
Трансляция аналоговой информации в центр УВД осуществляется с помощью широкополосной линии связи (ШЛС) на расстояния до10 км.
Более совершенными являются цифровые трансляторы, которым предшествуют системы обнаружения двоично-квантованных сигналов. Для обнаружения двоично-квантованных сигналов производится дискретизация продетектированного сигнала по времени и амплитуде. Используя логику обнаружения, соответствующую заданным вероятностям правильного обнаружения и ложной тревоги, определяют алгоритм обнаружения по K повторений амплитуды сигнала из пачки, состоящей из N повторений.
Такой алгоритм обнаружения называют «K из N», который реализуется с помощью схемы показанной на рис. 2.8. Двоично-квантованный сигнал одновременно поступает на регистр сдвига на N позиций и реверсивный счетчик на K позиций, выходы которого соединены с «K» входами схемы «И». При обнаружении цели на выходе схемы «И» формируется сигнал обнаружения.
Вследствие простоты технической реализации обнаружители двоично-квантованных сигналов нашли широкое применение.

Рис.2.8. Структурная схема обнаружителя по критерию «K из N»
– Конец работы –
Эта тема принадлежит разделу:
Трассовые обзорные радиолокаторы ОРЛ-Т (вариант А), с максимальной дальностью действия до 400 км
Современный этап развития гражданской авиации характеризуется широким внедрением автоматизированных систем управления воздушным движением АС УВД... В условиях высокой интенсивности и плотности воздушного движения особую... Среди радиотехнических средств обеспечения полетов особое место занимают радиолокационные станции РЛС поскольку...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Радиолокационные системы управления воздушным движением
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.043 сек.
Новости и инфо для студентов