Программируемый последовательный интерфейс. Назначение для САУ, его структура, структура кадра формата передачи данных по линии связи.
Программируемый последовательный интерфейс. Назначение для САУ, его структура, структура кадра формата передачи данных по линии связи. - раздел Производство, Задачи автоматизации производственных процессов
Обмен Информацией В Параллельном Коде Через Параллельные Порт...
Обмен информацией в параллельном коде через параллельные порты (интерфейсы) может быть успешно осуществлен только внутри микропроцессорной системы. Обмен информацией между микропроцессорными системами по этому принципу требует большого количества проводов, так как каждый разряд числового сигнала должен передаваться по отдельному проводу. Кроме того, этот процесс требует дополнительных проводов для передачи сигналов согласования приема и передачи числовых символов.
Проблема обмена информацией между двумя или несколькими микропроцессорными системами с минимальным количеством проводов успешно решается при применении последовательного кода (способа) передачи цифровых сигналов. По этому принципу в двухпроводной линии связи (ЛС) последовательно появляются цифровые двоичные символы с заданной разрядностью. Эти символы отображаются в сигнале в виде наличия или отсутствия импульсов заданной амплитуды и частоты. Для реализации такого способа передачи цифровой информации применяются устройства, которые называются последовательными интерфейсами (последовательными портами).
Последовательный программируемый интерфейс (порт) (ПосПИ) как структурный блок микропроцессорной системы работает независимо от самого микропроцессора по собственной программе, представленной в виде управляющего слова. Связи ПосПИ с управляющим микропроцессором через систему шин или с другим микропроцессором по линии связи показаны на рис.20.
Рис. 20 Структура связи ПосПИ с управляющим микропроцессором и с другим микропроцессором
Последовательный интерфейс связан с микропроцессором только через шину данных (ШД) и шину управления (ШУ). Причем в шину управления введены дополнительные связи для управления работой модема. Вход В/К используется, как и в предыдущих устройствах, для включения чипа (микросхемы) в работу через сигнал дешифратора внешних устройств.
С абонентной микропроцессорной системой данная система соединяется по системе линий связи ЛС, в которой выделяются две линии – линия передачи данных и линия синхронизации этой передачи. Данная схема ПосПИ представляет синхронную систему последовательной передачи данных, в которой обе микропроцессорные системы взаимно согласуются по частоте обмена цифровой информацией. Принцип работы такой системы рассмотрим на примере структуры, представленной на рис21
..
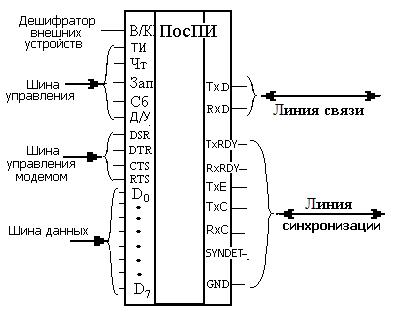
Рис.21. Внутренняя структура программируемого последовательногоинтерфейса .
Все структурные элементы последовательного интерфейса ПосПИ связаны внутренней шиной, к которой с одной стороны примыкают буфер шины данных, регистр управления и регистр управления модемом, а с другой к этой шине подсоединены регистры сдвига приемо-передатчика. Буфер шины данных предназначен для промежуточного хранения цифровых сигналов перед их передачей в шину данных всей системы или при приеме из нее сигнала на внутреннюю шину ПосПИ. По команде «запись» (Зп) этот интерфейс пересылает в буфер данных сигналы из системной шины данных или аналогично по команде «чтение» (Чт) посылает в эту шину сигналы из буфера шины данных. Регистр управления связан с системной шиной управления по следующим входам:
ТИ – тактовая частота системы;
Чт – команда «чтение»;
Зп – команда «запись»;
С/Б – команда «сброс»;
Д/У – команда , указывающая на тип передаваемых данных (данные или команда управления);
В/К – команда включения ЧИПа (микросхемы) в работу.
Регистр управления модемом последовательного интерфейса связан с системной шиной управления по следующим входам:
DSR – сигнал готовности передатчика к передаче данных;
DTR – сигнал запроса на прием информации;
RTS – сигнал готовности к приему информации;
CTS – сигнал разрешения передачи информации.
Передача информации в линию связи производится сигналом «TD», который появляется на выходе регистра сдвига передатчика. В свою очередь передатчик согласует свою работу с приемником противоположного последовательного порта через сигналы:
TxRDY – сигнал готовности передатчика принять символ данных от процессора в шину данных;
TxE – сигнал «буфер шины данных пустой»;
TxC – сигнал синхронизации передатчика с приемником.
Прием информации из линии связи в регистр сдвига приемника производится сигналом «RD». В свою очередь приемник согласует свою работу с передатчиком противоположного последовательного порта через сигналы:
RxRDY – сигнал готовности приемника передать символ данных процессору через шину данных;
RxC – сигнал синхронизации приемника с передатчиком.
Выше изложенная структура последовательного интерфейса относится к интерфейсам синхронного действия, в которых обе микропроцессорные системы согласованы по тактовому сигналу. Структура синхронной взаимосвязи двух микропроцессорных систем показана на рис.22
Рис.22 Структура синхронной взаимосвязи двух микропроцессорных систем
Принцип взаимной передачи информации по этой схеме состоит в следующем. Ведущий микропроцессор по уровню сигналов TxRDY и TxE опрашивает состояние передатчика и буфера шины данных, после чего выставляет на шине данных цифровой сигнал, одновременно с этим подает на шину управления команду «запись». По этой команде сигнал из шины данных запишется в буфер этой шины последовательного порта 1 (ведущего микропроцессора), после чего последовательный порт (интерфейс) этого микропроцессора работает уже независимо от него по собственной программе (управляющему слову). При заполнении из буфра данных регистра сдвига передатчика этого порта сигналом данных формируется команда DSR, которая передается на вход CTS последовательного порта 2 (ведомого микропроцессора). Если регистр сдвига последовательного порта 2 пуст, то он формирует обратную команду RTS, которая передается на вход DTR последовательного порта 1. В результате этого становится возможной передача данных по каналау TD или RD в линии связи и приемник последовательного порта 2 включается в работу.
Регистр сдвига этого микропроцессора по каналау TD последовательно заполняется битами данных цифрового сигнала (рис.21) с тактовой частотой. TxС ведомого микропроцессора. При полном заполнении этого регистра формируется сигнал RxRDY, по которому микропроцессор 2 приостанавливает выполнение всех операций, не связанных с приемом этого сигнала из линии RD и перходит на связь с его последовательным портом.
По этой же команде содержимое регистра сдвига приемника последовательного порта 2 пересылается в его буфер данных, из которого по команде «чтение» оно переносится через шину данных в микропроцессор 2 для дальнейшей обработки.
Таким образом, передатчик последовательного порта 1 ведущего микропроцессора всегда согласован в работе с приемником последовательного порта 2 ведомого микропроцессора, так же как буферы системных шин обеих портов согласованы в этой работе. При достижении этой согласованности порты синхронно с одинаковой тактовой частотой сигналов TxС и RxС совершают обмен информацией по перекрестным каналам TD и RD.
Структура информационног кадра при передаче по каналам каналам TD и RD выглядит следующим образом. (рис.23).
Рис. 23. Структура кадра передачи инфромации по каналам последовательной связи.
Информация в линии связи передается побитно. В период паузы в линии связи всегда устанавливается уровень логической единицы, что снижает в этот период вероятность появления помех. Признаком начала передачи данных является переход сигнала в течение периода одного такта с высокого уровня на низкий. Такой информационный импульс называется стартовым битом, после которого следует последовательная совокупность битов данных информационного сигнала (обычно по числу импульсов кратному восьми). В конце информационных битов следует бит проверки четности, за которым следуют стоповые биты, фиксирующие конец кадра передачи данных. После этого в линии связи вновь наступает период паузы.
Автоматическое управление По способу формирования управляющего воздействия автоматические устройства... Классификация САУ непрерывные и дискретные прямого и непрямого...
Задачи автоматизации производственных процессов.
Автоматизация технологических процессов предполагает решение следующих задач по управлению технологическими процессами:
Автоматическую сигнализацию о состоянии объект
Системы автоматической сигнализации
Системы автоматической сигнализации предназначены для дистанционной передачи информации о состоянии объекта управления. Такая система имеет следующую структуру:
Системы автоматического контроля
Системы автоматического контроля предназначены для контроля уровня одного или нескольких параметров объекта управления. Структура системы автоматического контроля следующая:
Системы автоматической защиты.
Системы автоматической защиты предназначены для поддержания в заданном пределе уровня одного или нескольких параметров объекта управления. Система автоматической защиты имеет следую
Системы автоматического пуска и останова объекта управления.
Эти системы предназначены для автоматического пуска или останова объекта управления. Автоматический пуск или останов объекта управления может осуществляться по сигналам с датчика (и
Системы автоматического регулирования объектов управления.
Системы автоматического регулирования объектов управления предназначены для поддержания заданно характера изменения во времени или от другого аргумента параметров работы объектов уп
Ручное управление
При ручном управлении управляющее воздействие на объект управления производится непосредственно человеком через его мускульное воздействие или через технические устройства, усиливаю
Автоматическое управление.
При автоматическом управлении управляющее воздействие на объект управления производится автоматическим управляющим устройством, работающем по заданному алгоритму без всякого участия человека. В это
Структура автоматизированного управления объектом.
Автоматизированное управление (рис.5) относится к комбинированному, человекомашинному способу управления, при котором управляющее воздействие на объект производится автоматическим у
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в
Следящие системы
В следящих системах управляющее воздействие является величиной переменной, но математическое описание управляющего воздействия во времени не может быть установлено, т.к. источником
Характеристика дискретного автомата.
Дискретный автомат – это абстрактное управляющее устройство дискретного действия с некоторой постоянной структурой. Наглядно дискретный автомат можно представить как некоторый матер
Построение графа переходов дискретного состояния автомата.
Для наглядности принципа последовательности функционирования автомата строятся графы, состоящие из системы вершин и ребер направлений. Каждая вершина графа соответствует конкретному
Граф-схемы алгоритмов
Последовательность функционирования дискретного автомата мажет быть представлена в виде структурного алгоритма через его граф схему. Основу граф-схемы алгоритма составляют структурн
Логические схемы алгоритмов.
Функциональная последовательность работы дискретного автомата мажет быть структурно представлена в виде логической блок схемы. Рассмотрим принцип построения таких схем на примере за
Синтез системы автоматического управления водоотливом.
Для структурного синтеза дискретного автомата выберем нижний уровень системы управления шахтного водоотлива. Функциональная структурная схема этой системы представле
Структура микропроцессорных систем
Несмотря на разное конструктивное исполнение, все микропроцессорные системы автоматического управления имеют общую внутреннюю структуру (рис. 14).
Основой любой микропроцес
Принцип работы микропроцессора при обработке команд
Перед началом работы микропроцессора в его программный счетчик автоматически заносится адрес первой команды программы управления работой микропроцессорной системы. Этот адрес через
Задачи автоматизации выемочных работ
Технологические процессы горного производства связные с его спецификой требуют от систем автоматического управления выполнения следующих задач.
Обеспечение минимальны
Требования к системам автоматизации выемочных работ
Системы автоматического управления технологическим процессом выемки полезного ископаемого должны обеспечивать.
Автоматическую подачу предупредительного звукового сигн
Способы автоматической передвижки призабойной крепи
При автоматической передвижке призабойной крепи применяют два способа этой передвижки:
Способ передвижки секций по принципу «десятков-единиц ». Способ «групповой» передвижки
Способ групповой передвижки секций
При групповой передвижке секций крепи (рис.41б) положительная полярность выходного сигнала блока управления БУ напрямую подключена к соответствующей полярности реле управления всех секций крепи, а
Требования к системам автоматизации буровых машин
Системы автоматического управления работой буровых машин должны обеспечивать:
Автоматическую установку буровой машины в нужной точке забоя в соответствии с паспортом
Принципы автоматизации пуска конвейерных линий.
Автоматический запуск конвейерной линии может осуществляться двумя способами:
Запуск каждого конвейера через установленный промежуток времени, который контролируется
Требования к системам автоматизации электровозной откатки.
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации долж
Аппаратура НЕРПА. Назначение, структура, принцип работы.
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения
Требования к системам автоматизации шахтного подъема.
Трбования к системам автоматизации шахтных подъемных установок делятся на три группы:
Обеспечение точного расчетного движения подъемных сосудов в соответствии с тахог
Требования к системам автоматизации проветривания шахты
Аппаратура автоматизации управления шахтными вентиляторами должна обеспечивать:
Работу установки в автоматическом режиме без постоянного присутствия обслуживающего персонала;
Особенности технологического процесса при добыче нефти
Связь всех технологических объектов месторождения через единый нефтяной пласт; Недостаток информации о процессах, происходящих в нефтяных пластах; Большая инерционность про
Принцип автоматизации первичной сепарации нефти
Технология первичной сепарации нефти (рис. 89) складывается из процесса ее подогрева до заданной температуры в печи 1 с последующим разделением ее на три фракции: нефть, газ и воду.
Принцип автоматизации ДНС.
Дожимная насосная станция (рис. 92) после первичной сепарации нефти обеспечивает ее переток к установкам дальнейшего технологического цикла и поддержание там необход
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail








Новости и инфо для студентов