Микроконтроллеры и принципы их объединения в распределенные сети управления объектами.
Микроконтроллеры и принципы их объединения в распределенные сети управления объектами. - раздел Производство, Задачи автоматизации производственных процессов
В Течение Многих Лет Системы Управления Строились По Централи...
В течение многих лет системы управления строились по централизованному типу, в котором имелось одно мощное управляющее вычислительное устройство со связью с объектами и огромное количество кабелей, с помощью которых подключались датчики и исполнительные устройства. Такая структура диктовалась большой ценой на компьютерные устройства. В результате снижения этой цены и повышения стоимости кабельной продукции возникла необходимость изменить структуру систем цифрового управления. Так появились первые цифровые промышленные сети.
Информационный обмен в промышленных сетях строится по одному из трех принципов. Первый принцип ведущий–ведомый, в котором ведущее устройство последовательно опрашивает ведомые, а они в свою очередь выполняют переданные им команды. Второй принцип клиент–сервер заключается в том, что узел клиент запрашивает данные, а узел сервер их пересылает. Третий принцип поиск заключается в том, что некоторый узел должен постоянно получать информацию от другого узла без дополнительного запроса. При этом в первом варианте данные посылаются циклически с определенным интервалом времени, а во втором случае они пересылаются только при их изменении.
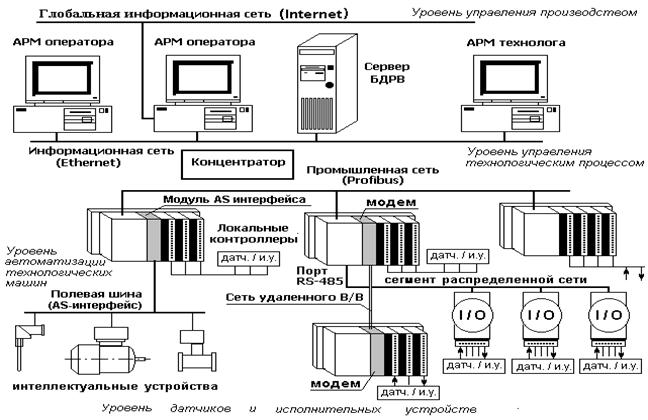
Современные открытые, распределенные системы управления строятся через промышленные сети по уровневому типу. Архитектура такой системы показана на рис.26.
Рис.26. Уровневая архитектура распределенной микропроцессорной системы управления
В этой сети выделяются следующие уровни:
управления производством;
управления технологическим процессом;
автоматизации технологических машин и устройств;
опроса датчиков и управления исполнительными устройствами.
На уровне управления производством с помощью системы Internet развернута глобальная информационная сеть, через которую администрация предприятия получает и передает информацию отраслевого типа, кроме того, она получает и обрабатывает международные финансово–экономические и конъюнктурные данные.
На уровне управления технологическим процессом в системе управления развернута информационная сеть, с помощью которой объединяются локальные серверы и рабочие станции для обмена информации по принципу клиент–сервер. Задача этой части сети состоит в обеспечении визуализации основных параметров производства, построения отчетов и архивации данных. На этом же уровне производится обмен информации между компьютерами, концентраторами и серверами. Обычно на этом уровне обмен информации происходит по высокоскоростному протоколу Ethernet. На этом же уровне могут быть установлены автоматизированные рабочие места АРМы для специалистов.
Связь этого уровня с нижестоящими уровнями часто производится через концентраторы. Концентратором считается контроллер типа РСУ с высокой вычислительной мощностью, способный обрабатывать десятки тысяч переменных. В SCADA–системах концентраторы применяются для организации обмена данными между контроллерами промышленной сети.
Сети, обеспечивающие обмен информации между контроллерами, датчиками и исполнительными устройствами, называются промышленными сетями. Они работают по принципу ведущий–ведомый и составляют уровень управления технологическим процессом. В состав промышленных сетей могут входить контроллеры с локальным и распределенным вводом/выводом.
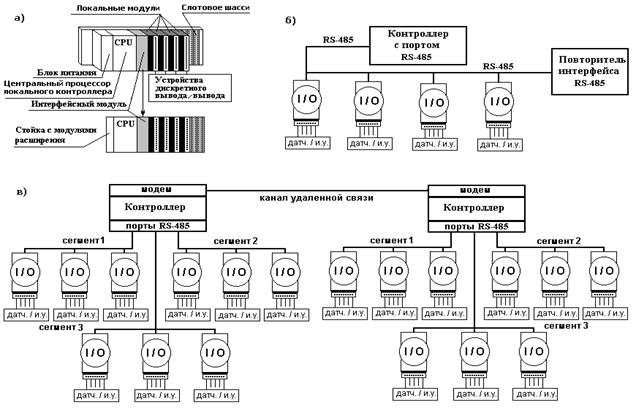
Под локальным способом ввода/вывода понимают такой способ ввода/вывода сигналов, при котором модули, обеспечивающие этот процесс, размещаются в одном устройстве с центральным процессором. Эти модули через систему слотов связаны с процессором по системной шине типа ISA или PCI. Слот – это стандартный разъем, предназначенный для стыковки модулей с системной шиной и расположенный на слотовом шасси. Так как количество
слотов в устройстве всегда ограничено, то в конструкции этих контроллеров предусматриваются технические средства, предусматривающие возможность расширения числа пристыкованных модулей. Один из вариантов структуры локального контроллера со слотовой связью показан на рис 27,а.
Под распределенным способом ввода/вывода понимают такой ввод/вывод информации, при котором модули ввода/вывода приближены к периферийным устройствам (датчикам и исполнительным механизмам), а управляющие контроллеры находятся на более высоком уровне и на значительном удалении от периферийных устройств. При этом типе промышленной сети ведущий контроллер всегда связан с несколькими ведомыми модулями. Ведущий контроллер называется мастером, а ведомые модули – слейвами. Связь типа мастер–слейв осуществляется по двухпроводной линии связи на длину 1200 -1500 метров по физическому протоколу RS-485. Если длина этой линии превышает указанный диапазон, то в нее включают повторители интерфейса (усилители сигнала). Структура сети такого типа показана на рис.27,б.
Для обмена информацией между контроллерами, расположенными на большом расстоянии друг от друга (десятки километров), используют сети удаленного доступа.
Рис.27. Типы распределенных сетей управления
Системы удаленного ввода/вывода (доступа) строятся из контроллеров или модулей соединенных по принципу ведущий–ведомый. При этом ведущий модуль располагается на верхнем уровне сети или в каркасе управляющего контроллера. Ведомый контроллер (или модуль) располагается на удаленном расстоянии и связывается с ведущим контроллером по специальной линии связи. Для того чтобы энергия информационного сигнала не затухала в канале связи, его модулируют (накладывают на несущий сигнал, который обладает значительно большей энергией), а затем его вновь отделяют от несущего сигнала (демодулируют) в ведомом контроллере. Этот процесс происходит в специальных устройствах, которые называются модемами (модуляторы–демодуляторы). По такой схеме ведущий модуль может поддерживать несколько ведомых модулей. Информация в контроллерах удаленного ввода/вывода формируется по принципам асинхронного обмена через порты интерфейса RS-485. Схема сети удаленного ввода/вывода показана на рис.27,в.
На самом нижнем уровне микропроцессорной системы управления к модулям нижнего уровня подключаются датчики и исполнительные устройства (внешние устройства). Такое подключение может осуществляться двояко: через параллельные или последовательные порты этих модулей. Параллельные порты модулей нижнего уровня обеспечивают непосредственное подключение аналоговых или дискретных внешних устройств. При этом каждый из таких устройств требует, как минимум, пары проводов для подключения. При большом количестве внешних устройств увеличивается не только расход монтажного провода, но и возрастает сложность компоновки и монтажа этих устройств.
Устранение этого недостатка стало возможным при использовании в структуре промышленной сети полевых шин. Полевая шина – это разновидность промышленной сети нижнего уровня, которая позволяет использовать дву- жильный монтажный кабель специального профиля для подключения через последовательный порт принимающего модуля до 62 внешних устройств. При этом питание, опрос и выдача команд для этих устройств производится по одному и тому же кабелю. Внедрение полевых шин стало возможным только тогда, когда внешние устройства стали интеллектуальными, т.е. в структуру этих устройств были введены микропроцессоры, позволяющие преобразовывать аналоговые сигналы в цифровые. Это позволило по полевой шине передавать цифровую информацию в последовательном коде. Полевые шины строятся на основе специального протокола – AS интерфейса.
Полевая шина на основе AS–интерфейса может иметь только одно ведущее устройство (мастер) и до 62 ведомых устройств (слейвов). При опросе датчиков или исполнительных устройств ведущий модуль циклически опрашивает каждый из них, при этом на весь опрос затрачивается около 5-10 мс. Вариант организации полевой шины показан на рис.26.
Автоматическое управление По способу формирования управляющего воздействия автоматические устройства... Классификация САУ непрерывные и дискретные прямого и непрямого...
Задачи автоматизации производственных процессов.
Автоматизация технологических процессов предполагает решение следующих задач по управлению технологическими процессами:
Автоматическую сигнализацию о состоянии объект
Системы автоматической сигнализации
Системы автоматической сигнализации предназначены для дистанционной передачи информации о состоянии объекта управления. Такая система имеет следующую структуру:
Системы автоматического контроля
Системы автоматического контроля предназначены для контроля уровня одного или нескольких параметров объекта управления. Структура системы автоматического контроля следующая:
Системы автоматической защиты.
Системы автоматической защиты предназначены для поддержания в заданном пределе уровня одного или нескольких параметров объекта управления. Система автоматической защиты имеет следую
Системы автоматического пуска и останова объекта управления.
Эти системы предназначены для автоматического пуска или останова объекта управления. Автоматический пуск или останов объекта управления может осуществляться по сигналам с датчика (и
Системы автоматического регулирования объектов управления.
Системы автоматического регулирования объектов управления предназначены для поддержания заданно характера изменения во времени или от другого аргумента параметров работы объектов уп
Ручное управление
При ручном управлении управляющее воздействие на объект управления производится непосредственно человеком через его мускульное воздействие или через технические устройства, усиливаю
Автоматическое управление.
При автоматическом управлении управляющее воздействие на объект управления производится автоматическим управляющим устройством, работающем по заданному алгоритму без всякого участия человека. В это
Структура автоматизированного управления объектом.
Автоматизированное управление (рис.5) относится к комбинированному, человекомашинному способу управления, при котором управляющее воздействие на объект производится автоматическим у
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в
Следящие системы
В следящих системах управляющее воздействие является величиной переменной, но математическое описание управляющего воздействия во времени не может быть установлено, т.к. источником
Характеристика дискретного автомата.
Дискретный автомат – это абстрактное управляющее устройство дискретного действия с некоторой постоянной структурой. Наглядно дискретный автомат можно представить как некоторый матер
Построение графа переходов дискретного состояния автомата.
Для наглядности принципа последовательности функционирования автомата строятся графы, состоящие из системы вершин и ребер направлений. Каждая вершина графа соответствует конкретному
Граф-схемы алгоритмов
Последовательность функционирования дискретного автомата мажет быть представлена в виде структурного алгоритма через его граф схему. Основу граф-схемы алгоритма составляют структурн
Логические схемы алгоритмов.
Функциональная последовательность работы дискретного автомата мажет быть структурно представлена в виде логической блок схемы. Рассмотрим принцип построения таких схем на примере за
Синтез системы автоматического управления водоотливом.
Для структурного синтеза дискретного автомата выберем нижний уровень системы управления шахтного водоотлива. Функциональная структурная схема этой системы представле
Структура микропроцессорных систем
Несмотря на разное конструктивное исполнение, все микропроцессорные системы автоматического управления имеют общую внутреннюю структуру (рис. 14).
Основой любой микропроцес
Принцип работы микропроцессора при обработке команд
Перед началом работы микропроцессора в его программный счетчик автоматически заносится адрес первой команды программы управления работой микропроцессорной системы. Этот адрес через
Задачи автоматизации выемочных работ
Технологические процессы горного производства связные с его спецификой требуют от систем автоматического управления выполнения следующих задач.
Обеспечение минимальны
Требования к системам автоматизации выемочных работ
Системы автоматического управления технологическим процессом выемки полезного ископаемого должны обеспечивать.
Автоматическую подачу предупредительного звукового сигн
Способы автоматической передвижки призабойной крепи
При автоматической передвижке призабойной крепи применяют два способа этой передвижки:
Способ передвижки секций по принципу «десятков-единиц ». Способ «групповой» передвижки
Способ групповой передвижки секций
При групповой передвижке секций крепи (рис.41б) положительная полярность выходного сигнала блока управления БУ напрямую подключена к соответствующей полярности реле управления всех секций крепи, а
Требования к системам автоматизации буровых машин
Системы автоматического управления работой буровых машин должны обеспечивать:
Автоматическую установку буровой машины в нужной точке забоя в соответствии с паспортом
Принципы автоматизации пуска конвейерных линий.
Автоматический запуск конвейерной линии может осуществляться двумя способами:
Запуск каждого конвейера через установленный промежуток времени, который контролируется
Требования к системам автоматизации электровозной откатки.
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации долж
Аппаратура НЕРПА. Назначение, структура, принцип работы.
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения
Требования к системам автоматизации шахтного подъема.
Трбования к системам автоматизации шахтных подъемных установок делятся на три группы:
Обеспечение точного расчетного движения подъемных сосудов в соответствии с тахог
Требования к системам автоматизации проветривания шахты
Аппаратура автоматизации управления шахтными вентиляторами должна обеспечивать:
Работу установки в автоматическом режиме без постоянного присутствия обслуживающего персонала;
Особенности технологического процесса при добыче нефти
Связь всех технологических объектов месторождения через единый нефтяной пласт; Недостаток информации о процессах, происходящих в нефтяных пластах; Большая инерционность про
Принцип автоматизации первичной сепарации нефти
Технология первичной сепарации нефти (рис. 89) складывается из процесса ее подогрева до заданной температуры в печи 1 с последующим разделением ее на три фракции: нефть, газ и воду.
Принцип автоматизации ДНС.
Дожимная насосная станция (рис. 92) после первичной сепарации нефти обеспечивает ее переток к установкам дальнейшего технологического цикла и поддержание там необход
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail







Новости и инфо для студентов