Принцип автоматизации группового контроля дебита нефтяных или газовых скважин
Принцип автоматизации группового контроля дебита нефтяных или газовых скважин - раздел Производство, Задачи автоматизации производственных процессов
Автоматизированный Замер Дебита Куста Нефтяных Скважин Осущес...
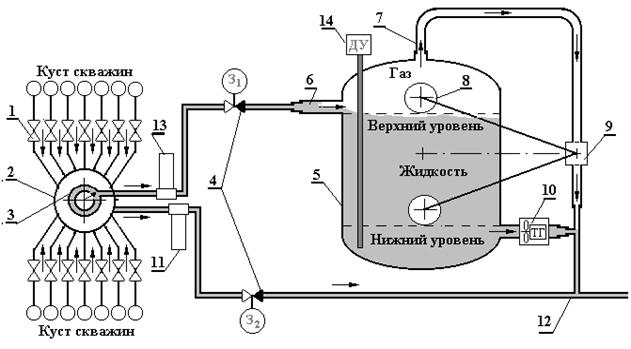
Автоматизированный замер дебита куста нефтяных скважин осуществляется на групповой измерительной установке «Спутник» (рис. 83), которая имеет несколько модификаций.
К кусту нефтедобывающих скважин эта установка подключается через систему трубопроводов 1, соединенных с переключателем скважин многоходовым (ПСМ). Этот переключатель через переключающее устройство 3 подключает одну из скважин к измерительному сепаратору 5, а остальные скважины куста через сливную полость 2 соединяются с общим коллектором 12. Управляемые задвижки 4 регулируют потоки в измерительной и сливной магистралях. Отсекатели 11 и 13 (обратные клапаны) предназначены для аварийного перекрытия коллектора и измерительной магистрали при аварийной ситуации, прежде чем сработают управляемые задвижки 4.
Измерительный сепаратор состоит из герметичной емкости 5, в которую через верхний патрубок 6 поступает газонефтеводяная смесь. В верхней части емкости расположен газовый патрубок 7, связанный с газовым клапаном 9, который управляется положением поплавкового регулятора 8. Нижний выходной патрубок емкости 5 соединен с расходомером 10.
При нижнем положении поплавка регулятора 8 клапан 9 открыт, поэтому газовая фракция из поступающей смеси свободно перетекает через него в общий коллектор 12. При этом внутри емкости 5 давление газа поддерживается на минимальном уровне, в результате чего жидкая фракция смеси свободно заполняет ее внутреннюю полость, уровень этой жидкости повышается до верхней отметки.
Рис. 83. Функциональная схема установки «Спутник»
Когда этот уровень достигнет верхней отметки, газовый клапан закрывается регулятором 8, в результате этого давление газа во внутренней полости емкости 5 повышается до предельного уровня. Под действием давления жидкая фракция вытесняется через нижний патрубок и расходомер в общий коллектор 12. Этот процесс продолжается до тех пор, пока уровень жидкости не достигнет нижней отметки. Если это произойдет, то газовый клапан 9 снова открывается и процесс наполнения емкости возобновляется.
Подключение конкретной скважины к измерительному сепаратору осуществляется через ПСМ (рис. 84).
Этот переключатель патрубками 11 соединяется с трубопроводами устьевой обвязки каждой скважины куста. В свою очередь, эти патрубки радиально расположены в цилиндрическом корпусе переключателя, во внутренней полости которого помещается полый изогнутый патрубок 9, жестко соединенный с поворотным механизмом переключателя. Этот механизм состоит из кулачкового храповика 7, жестко посаженного на поворотном валу, на котором свободно вращается шестерня 8. Эта шестерня с одной стороны имеет связь с храповиком 7 через его зубчатую нарезку, а с другой стороны эта шестерня через зубчатую рейку связана со штоком 5 поршня гидроцилиндра 4. Во внутреннюю полость гидроцилиндра подается рабочая жидкость от насосной установки 3. На поворотном валу также жестко закреплены два кулачковых диска 1 и 2, с помощью которых импульсно замыкаются контакты К1 и К2, предназначенные для автоматического управления ориентацией переключателя на конкретную скважину.
При включении насоса 3 рабочая жидкость подается в гидроцилиндр 4, поршень которого, сжимая пружину 12, перемещает шток 5. Зубчатая нарезка (зубчатая рейка) на его конце входит в зацепление с шестерней 8. На торцевой поверхности этой шестерни имеются зубья с упорной косозубой нарезкой, которые входят в упорный контакт с подобными зубьями храповика 7. В результате этого при перемещении штока гидроцилиндра храповик вместе с шестерней поворачивается. Храповик 7 жестко связан с поворотным валом, одновременно являющимся осью поворота изогнутого патрубка 9.
При совместном повороте этой системы изогнутый патрубок при конечном положении поршня в гидроцилиндре устанавливается напротив отверстия очередного радиального входного патрубка 11. В этом случае устье очередной скважины через патрубки 11 и 10 соединяется с измерительным сепаратором. Все остальные радиальные патрубки, соединенные со скважинами, в это время сливают поступающую смесь в общий коллектор через патрубок 13.
При подключении очередной скважины к измерительному сепаратору один из кулачков диска 2 замыкает контакт К2, с помощью которого система автоматики регистрирует это подключение, а также считает количество последовательных поворотов. При замыкании контакта К2 привод насоса останавливается и поршень гидроцилиндра 4 пружиной 5 возвращается в исходное положение, при этом торцевые зубья шестерни 8 проскальзывают по зубьям храповика 7 в обратном направлении, сжимая при этом пружину 6. При обратном движении поршня изогнутый патрубок 9 остается неподвижным совместно с храповиком.
Полный оборот изогнутого поворотного патрубка 9 фиксируется замыканием контакта К1, которое обеспечивается единственным кулачком диска 1.
Подключение скважин к измерительному сепаратору может быть последовательным или целенаправленным. Каждый из этих процессов управления автоматически выполняется по отдельному алгоритму.
Управление работой групповой измерительной установки осуществляется автоматизированной системой (рис. 85).
Рис. 85. Структура системы автоматизированного управления работой групповой измерительной установки
На верхнем информационном уровне этой системы расположен компьютер оператора, связанный через информационную сеть с функциональными элементами нижележащих уровней. На уровне управления (нижний уровень) в этой системе расположен ПЛК локального типа, процессор CPU которого связан по системной шине ISA с портами и модулями расширения.
На самом нижнем (полевом) уровне расположены датчики и исполнительные устройства, подключенные к соответствующим портам модулей расширения. К модулю дискретного ввода подключены датчик положения газового клапана, датчик верхнего уровня жидкости в измерительном сепараторе, датчики К1 и К2 переключателя скважин, кнопка К3 и кнопки
I1 − I12, с помощью которых производится постановка на замер конкретной скважины.
К модулю импульсного ввода подключают импульсный датчик, предназначенный для замера расхода жидкой фракции смеси. Включение гидронасоса и задвижек на общем коллекторе и на линии замера производится с выхода порта дискретного выхода.
Работа микропроцессорной системы управления процессом замера дебита скважин происходит по алгоритму, представленному на рис. 86.
Рис. 86. Структура алгоритма управления автоматизированной групповой
замерной установкой
Алгоритм начинается с пуска привода насоса сигналом модуля дискретного вывода. В результате этого поршень гидроцилиндра 4 ПСМ начинает поворачивать храповик с изогнутым патрубком. Вместе с этим патрубком начинают вращаться и кулачковые диски 1 и 2, которые соответственно включают контакты датчиков К1 и К2. Алгоритмом последовательно проверяются их срабатывания.
При срабатывании датчика К1 завершается полный оборот патрубка переключателя, поэтому счетчик переключений должен быть обнулен.
Дальнейшим ходом алгоритма проверяется положение датчика К2, который срабатывает только тогда, когда подвижный патрубок переключателя переместится на нужный угол поворота. При каждом срабатывании дискретного датчика К2 счетчик системы увеличивает свое содержание на единицу. После срабатывания счетчика на период возврата поршня гидроцилиндра в исходное положение необходимо отключить привод насоса и включить в работу таймер. Возврат поршня под действием пружины 12 происходит в течение работы таймера.
Последовательность дальнейших операций определяется выбором соответствующей подпрограммы. Этот выбор зависит от состояния тумблера (датчика) К3, т.е. от выбора режима замера.
Операции по замеру дебита скважины могут выполняться двояко: последовательным подключением скважин на замер и произвольным подключением одной из них по выбору оператора. Если переключатель К3 включен, то скважины подключаются по выбору оператора, при этом алгоритм выполняет подпрограмму I, в противном случае скважины на замер подключаются последовательно и алгоритм выполняет только подпрограмму Q.
Подпрограмма Q предназначена для непосредственного управления процессом замера дебита скважины. Структура этой подпрограммы показана на рис. 87.
Рис. 87. Структура алгоритма (подпрограммы) замера дебита скважины
Алгоритм этой подпрограммы начинается с циклического опроса состояния газового клапана. Пока этот клапан открыт (ГК=0), жидкая фракция, поступающая во внутреннюю полость сепаратора, постепенно заполняет ее до уровня верхней отметки. При достижении этого уровня происходит закрытие газового клапана, в результате этого давление во внутренней полости сепаратора начинает повышаться и жидкая фракция вытесняется в коллектор.
Процесс вытеснения жидкой фракции продолжается вплоть до открытия газового клапана, которое наступает в момент достижения жидкостью уровня нижней отметки во внутренней полости сепаратора. При выталкивании в коллектор жидкая фракция проходит через датчик расхода, сигнал которого подается к модулю аналогового входа. Одновременно по алгоритму вычисляется расход этой фракции как произведение вытесняемого в общий коллектор ее объема и времени этого вытеснения.
Подпрограмма I предназначена для управления процессом выбора номера скважины, которую оператору нужно поставить на замер дебита. Структура этой подпрограммы показана на рис. 88.
Переход к этой подпрограмме осуществляется включением оператором тумблера К3, подключенного к модулю дискретного ввода и регистрирующего вызов скважины с заданным номером для подключения на замер. Одновременно оператор включает тумблер (с I1 по In) той скважины, которую необходимо перевести на режим замера дебита.
Подпрограмма I первоначально опрашивает содержание счетчика и сравнивает его с номером той скважины, которую поставил соответствующим тумблером оператор на замер. Это сравнение идет в пределах от I1 до In. При совпадении содержания счетчика с номером выбранной скважины происходит переход к подпрограмме Q, а затем и выход в основную программу.
Рис. 88. Структура алгоритма (подпрограммы) замера дебита скважины по
Автоматическое управление По способу формирования управляющего воздействия автоматические устройства... Классификация САУ непрерывные и дискретные прямого и непрямого...
Задачи автоматизации производственных процессов.
Автоматизация технологических процессов предполагает решение следующих задач по управлению технологическими процессами:
Автоматическую сигнализацию о состоянии объект
Системы автоматической сигнализации
Системы автоматической сигнализации предназначены для дистанционной передачи информации о состоянии объекта управления. Такая система имеет следующую структуру:
Системы автоматического контроля
Системы автоматического контроля предназначены для контроля уровня одного или нескольких параметров объекта управления. Структура системы автоматического контроля следующая:
Системы автоматической защиты.
Системы автоматической защиты предназначены для поддержания в заданном пределе уровня одного или нескольких параметров объекта управления. Система автоматической защиты имеет следую
Системы автоматического пуска и останова объекта управления.
Эти системы предназначены для автоматического пуска или останова объекта управления. Автоматический пуск или останов объекта управления может осуществляться по сигналам с датчика (и
Системы автоматического регулирования объектов управления.
Системы автоматического регулирования объектов управления предназначены для поддержания заданно характера изменения во времени или от другого аргумента параметров работы объектов уп
Ручное управление
При ручном управлении управляющее воздействие на объект управления производится непосредственно человеком через его мускульное воздействие или через технические устройства, усиливаю
Автоматическое управление.
При автоматическом управлении управляющее воздействие на объект управления производится автоматическим управляющим устройством, работающем по заданному алгоритму без всякого участия человека. В это
Структура автоматизированного управления объектом.
Автоматизированное управление (рис.5) относится к комбинированному, человекомашинному способу управления, при котором управляющее воздействие на объект производится автоматическим у
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в
Следящие системы
В следящих системах управляющее воздействие является величиной переменной, но математическое описание управляющего воздействия во времени не может быть установлено, т.к. источником
Характеристика дискретного автомата.
Дискретный автомат – это абстрактное управляющее устройство дискретного действия с некоторой постоянной структурой. Наглядно дискретный автомат можно представить как некоторый матер
Построение графа переходов дискретного состояния автомата.
Для наглядности принципа последовательности функционирования автомата строятся графы, состоящие из системы вершин и ребер направлений. Каждая вершина графа соответствует конкретному
Граф-схемы алгоритмов
Последовательность функционирования дискретного автомата мажет быть представлена в виде структурного алгоритма через его граф схему. Основу граф-схемы алгоритма составляют структурн
Логические схемы алгоритмов.
Функциональная последовательность работы дискретного автомата мажет быть структурно представлена в виде логической блок схемы. Рассмотрим принцип построения таких схем на примере за
Синтез системы автоматического управления водоотливом.
Для структурного синтеза дискретного автомата выберем нижний уровень системы управления шахтного водоотлива. Функциональная структурная схема этой системы представле
Структура микропроцессорных систем
Несмотря на разное конструктивное исполнение, все микропроцессорные системы автоматического управления имеют общую внутреннюю структуру (рис. 14).
Основой любой микропроцес
Принцип работы микропроцессора при обработке команд
Перед началом работы микропроцессора в его программный счетчик автоматически заносится адрес первой команды программы управления работой микропроцессорной системы. Этот адрес через
Задачи автоматизации выемочных работ
Технологические процессы горного производства связные с его спецификой требуют от систем автоматического управления выполнения следующих задач.
Обеспечение минимальны
Требования к системам автоматизации выемочных работ
Системы автоматического управления технологическим процессом выемки полезного ископаемого должны обеспечивать.
Автоматическую подачу предупредительного звукового сигн
Способы автоматической передвижки призабойной крепи
При автоматической передвижке призабойной крепи применяют два способа этой передвижки:
Способ передвижки секций по принципу «десятков-единиц ». Способ «групповой» передвижки
Способ групповой передвижки секций
При групповой передвижке секций крепи (рис.41б) положительная полярность выходного сигнала блока управления БУ напрямую подключена к соответствующей полярности реле управления всех секций крепи, а
Требования к системам автоматизации буровых машин
Системы автоматического управления работой буровых машин должны обеспечивать:
Автоматическую установку буровой машины в нужной точке забоя в соответствии с паспортом
Принципы автоматизации пуска конвейерных линий.
Автоматический запуск конвейерной линии может осуществляться двумя способами:
Запуск каждого конвейера через установленный промежуток времени, который контролируется
Требования к системам автоматизации электровозной откатки.
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации долж
Аппаратура НЕРПА. Назначение, структура, принцип работы.
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения
Требования к системам автоматизации шахтного подъема.
Трбования к системам автоматизации шахтных подъемных установок делятся на три группы:
Обеспечение точного расчетного движения подъемных сосудов в соответствии с тахог
Требования к системам автоматизации проветривания шахты
Аппаратура автоматизации управления шахтными вентиляторами должна обеспечивать:
Работу установки в автоматическом режиме без постоянного присутствия обслуживающего персонала;
Особенности технологического процесса при добыче нефти
Связь всех технологических объектов месторождения через единый нефтяной пласт; Недостаток информации о процессах, происходящих в нефтяных пластах; Большая инерционность про
Принцип автоматизации первичной сепарации нефти
Технология первичной сепарации нефти (рис. 89) складывается из процесса ее подогрева до заданной температуры в печи 1 с последующим разделением ее на три фракции: нефть, газ и воду.
Принцип автоматизации ДНС.
Дожимная насосная станция (рис. 92) после первичной сепарации нефти обеспечивает ее переток к установкам дальнейшего технологического цикла и поддержание там необход
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail









Новости и инфо для студентов