рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Скидання
Реферат Курсовая Конспект
Скидання
Скидання - раздел Образование, У 1975 році фірма GI розробила периферійний контролер Peripheral Interface Controller або PIC Організація Скидання В Pic 16С84 Не Відрізняється Від Pic 16С71. Стан Спец...
Організація скидання в PIC 16С84 не відрізняється від PIC 16С71. Стан спеціальних регістрів після скидання наведений в табл. 2.17.
Таблиця 2.17
Стан спеціальних регістрів після скидання
| Адреса | Ім'я | Скидання при включенні живлення | Скидання по /MCLR і WDT | ||
| Банк 0 | |||||
| 00h | INDF | - - - - | - - - - | - - - - | - - - - |
| 01h | TMRO | xxxx | uuuu | uuuu | |
| 02h | PCL | ||||
| 03h | STATUS2 | 1xxx | 000q | quuu | |
| 04h | FSR | xxxx | xxxx | uuuu | uuuu |
| 05h | PORTA | - - - х | xxxx | - - - u | uuuu |
| 06h | PORTB | - - - - | xxxx | uuuu | uuuu |
| 07h | - - - - | - - - - | - - - - | ||
| 8h | EEDATA | xxxx | xxxx | uuuu | uuuu |
| 09h | EEADR | xxxx | xxxx | ||
| 0Ah | PCLATH | - - - 0 | - - - 0 | ||
| 0Bh | INTCON | 000x | 000U | ||
| Банк 1 | |||||
| 80h | INDF | - - - - | - - - - | - - - - | - - - - |
| 81h | OPTION | ||||
| 82h | PCL | ||||
| 83h | STATUS2 | 1xxx | 000q | quuu | |
| 84h | FSR | xxxx | xxxx | uuuu | uuuu |
| 85h | TRISA | - - - 1 | - - - 1 | ||
| 86h | TRISB | ||||
| 87h | - - - - | - - - - | - - - - | - - - - | |
| 88h | EECIN1 | - - - 0 | x000 | - - - 0 | q000 |
| 89h | EECON2 | - - - - | - - - - | - - - - | - - - - |
| 0Ah | PCLATH | - - - 0 | - - - 0 | ||
| 0Bh | INTCON | 000x | 000u |
Позначення: х – не визначено; u – не змінюється; – відсутнє, читається як “0”; q – значення залежить від умов скидання.
2.5. Інші мікроконтролери розширеного сімейства ОМК PIC
Інші мікроконтролери розширеного сімейства PIC 16C7X/8X/9X відрізняються від розглянутих вище представників кількістю портів і ліній вводу/виводу, а також набором периферійних пристроїв. До їх складу можуть, наприклад, входити:
· Багатоканальний 16-розрядний АЦП;
· Модуль керування рідинно-кристалевими індикаторами (РКІ);
· Цифровий перемножувач 8 х 8 біт;
· Модуль захвату (защіплення), порівняння і ШІМ (широтно-імпульсної модуляції);
· Схема формування сигналу “Скидання” при зниженні напруги живлення;
· Послідовні порти USART/SCI, SSP (I2C/SPI з апаратною підтримкою режиму веденого);
· Паралельний порт (з апаратною підтримкою режиму ведучого).
Для того, щоб створити уявлення про найбільш потужних представників розширеного сімейства PIC-мікроконтролерів, обладнаних великою периферією, далі приводяться стислі характеристики деяких із них.
2.5.1. РІС16С924 – мікроконтролер із схемою керування
рідиннокристалічним індикатором (РКІ)
Мікроконтролер РІС16С924 містить схему керування РКІ і 8-розрядний 5-канальний АЦП. Можливості мікроконтролера задовольняють вимогам ряду прикладень від кишенькових вимірювальних приладів, термостатів до домашніх засобів безпеки.
Основні характеристики:
· Тактова частота від 0 до 8 МГц (тривалість циклу команди до 500 нс);
· Пам'ять програм – 4096 14-розрядних слів (EPROM);
· 176 8-розрядних регістрів оперативної пам'яті;
· Можливості переривання;
· Апаратний стек із вісьма рівнями;
· Скидання при вмиканні живлення (POR);
· Таймер вмикання живлення (PWRT) і таймер запуску тактового генератора (OST);
· Сторожовий таймер (WDT) із власним вмонтованим RC-генератором для надійного виконання операцій;
· Програмний захист коду;
· Економічний режим SLEEP;
· Послідовне внутрісхемне програмування через два виводи;
· 25 ліній вводу-виводу з індивідуальним завданням напрямку;
· 25...27 вхідних ліній;
· Широкий діапазон напруг живлення: 3,0...6,0 В;
· Мале споживання по живленню:
– не більше 2 мА при напрузі живлення 5 В і тактовій частоті 4 МГц;
– типове значення 22,5 мкА при напрузі живлення 3 В і тактовій частоті 32 кГц;
– не більше 1 мкА типове значення в економічному режимі.
Периферійні можливості:
· Timer0: 8-розрядний таймер/лічильник із 8-розрядним попереднім дільником;
· Timer1: 16-розрядний таймер/лічильник із попереднім дільником, може функціонувати в економічному режимі через зовнішній вхід;
· Timer2: 8-розрядний таймер/лічильник із 8-розрядним регістром періоду, попереднім дільником і вихідним дільником;
· 2 модуля захвата/порівняння/ШІМ:
– захват 16 розрядів, максимальна дозволяюча здатність 31,25 нс;
– порівняння 16 розрядів, максимальна дозволяюча здатність 500 нс;
· ШІМ, максимальна дозволяюча здатність 10 розрядів. Максимальна частота ШІМ при 8-розрядній дозволяючій здатності – 32 кГц, при 10-розрядній дозволяючій здатності – 8 кГц;
· Програмований модуль керування РКІ:
– можливість керування РКІ в економічному режимі;
– 16 байтів пам'яті дисплея РКІ;
– програмований мультиплексний режим (статичний, 1/2, 1/3 або 1/4);
– програмний зсув (статичний або 1/3);
– структура сегментів РКІ від 1 х 32 до 4 х 29;
· 8-розрядний 5-канальний аналого-цифровий перетворювач;
· Синхронний послідовний порт (SSP) з інтерфейсами SPТМ і I2СТМ.
2.6. Мікроконтролери найпростішого сімейства PIC12CХХX
Сімейство однокристальних мікроконтролерів PIC 12CХХ складається із самих простих МК з RISC архітектурою. Всі мікроконтролери даного сімейства мають тільки 33 12-розрядних команди, виконані в 8-вивідних корпусах і представляють собою мініатюрні копії основних типів МК сімейств PIC 16СХХ. Тому структурна організація конкретних типів даних ОМK PIC 12CХХ і мікроконтролерів базового і розширеного сімейства багато в чому збігається.
2.6.1. Мікроконтролери PIC12С5ХX
Мікроконтролери PIC12С5Х (рис. 2.30, табл. 2.18) представляють собою по суті МК PIC16С5Х, але з дуже малою кількістю ліній вводу-виводу дискретних сигналів (максимум 6, за умови використання внутрішнього тактового RC-генератора) і низькою тактовою частотою (усього 4 МГц). Системи команд даних сімейств мікроконтролерів цілком збігаються.
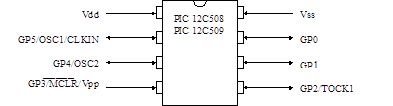
Рис. 2.30. Розташування виводів PIC 12С5ХХ
Таблиця 2.18
Призначення виводів PIC12C5XX
| Ім'я | Вивід DIP* | Вивід SOIC* | Тип I/0/Р | Тип буфера | Призначення |
| GPO | I/O | TTL/ ST | Двонаправлений порт вводу-виводу / вхід синхронізації при програмуванні. Може бути запрограмований на підключення внутрішнього резистора до напруги живлення і на «пробудження» із економічного режиму при зміні стану на виході. У режимі програмування вхід буферизовано тригером Шмітта. | ||
| GP1 | I/O | TTL/ ST | Двонаправлений порт вводу-виводу / лінія даних при програмуванні. Може бути запрограмований на підключення внутрішнього резистора до напруги живлення і на «пробудження» із економічного режиму при зміні стану на виході. У режимі програмування вхід буферизовано тригером Шмітта. |
Продовження табл. 2.8
| Ім'я | Вивід DIP* | Вивід SOIC | Тип I/0/Р | Тип буфера | Призначення |
| QP2/ TOCKI | I/O | ST | Двонаправлений порт вводу-виводу. Може бути сконфігуровано як вхід таймера/лічильника TOCKI. | ||
| GP5/ OSC1/ CLKIN | I/O | TTL/ ST | Двонаправлений порт вводу-виводу / вхід кварцового генератора /вхід зовнішнього тактового генератора. GPIO у режимі внутрішнього тактового генератора, OSC1 в інших режимах генератора. | ||
| VDD | Р | – | Позитивна напруга живлення для логіки і ліній вводу-виводу. | ||
| Vss | Р | – | Загальний вихід для логіки і ліній вводу-виводу. |
Пояснення: I – вхід, I/O – вхід/вихід, Р – живлення, TTL – вхід ТТЛ, ST – вхід із тригером Шмітта
Мікроконтролери PIC12С5ХХ мають такі функціональні модулі й особливості:
· Сім регістрів спеціальних функцій;
· Дворівневий стек;
· Прямі, непрямі та відносні способи адресації для даних і команд;
· Внутрішній RC-генератор на 4 МГц;
· Внутрішній автомат послідовного програмування;
· 8-розрядний таймер/лічильник реального часу (TMR0);
· 8-розрядний попередній дільник (PRS), який можна перепрограмовувати;
· Скидання по ввімкненню живлення (POR);
· Таймер скидання (DRT);
· Сторожовий таймер (WDT) із власним RС генератором;
· Захист коду;
· Режим пониженого енергоспоживання SLEEP;
· Вихід із режиму SLEEP при зміні рівня на зовнішньому виході;
· Можливість програмного підключення внутрішніх резисторів, що підтягають;
· Внутрішній резистор, що підтягає, на виході MCLR;
· Вибір типу генератора:
- INTRC: внутрішній RC-генератор 4 МГц;
- EXTRC: зовнішній RС-генератор;
- XT: стандартний кварцовий резонатор;
- LP: низькочастотний керамічний резонатор.
2.6.1.1. Пам'ять програм
Для МК з об’ємом пам'яті програм більше 512 слів використовується сторінкова організація пам'яті. Звертання до сторінок пам'яті виконується з використанням біта РА0 регістра стану STATUS. Вектор скидання розташовується за адресою 0000h. За адресою 01FFh (РІС12С508) або 03FFh (PIC12C509) розміщена константа калібрування внутрішнього тактового генератора. Це значення ніколи не повинно змінюватися.
2.6.1.2. Пам'ять даних
Для мікроконтролера PIC12C509, що має більше 32 регістрів даних, пам'ять даних розділена на банки. Доступ до банків даних забезпечується через регістр вибору файла (FSR).
Вся пам'ять даних підрозділяється на регістри спеціальних функцій і універсальні регістри. Регістр спеціальних функцій містять у собі регістр 8-розрядного таймера/лічильника TMRO (01 h), регістр лічильника команд PC, поданий молодшим байтом PCL (02h), регістр стану STATUS (03h), регістр вибору файла FSR (04h), регістр константи калібрування внутрішнього тактового генератора OSCCAL (05h) і регістр порту вводу-виводу GPIO (06h). Регістр спеціальних функцій, що не відображаються у пам'яті даних, використовуються також для керування драйверами виходів (TRIS) і керування попереднім дільником частоти таймера/лічильника та ін.
2.6.1.3. Регістр стану STATUS
Регістр стану містить інформацію про результати виконання арифметичних операцій, стану скидання і біт вибору сторінки для пам'яті програм об’ємом більше 512 слів. Біти регістра стану мають призначення, яке наведено в табл. 2.19.
Регістр стану може бути операндом будь-якої команди, як і будь-який інший регістр. Якщо регістр стану є операндом у команді, що впливає на його біти Z, DC і C, то запис у ці біти заблокований. Ці біти встановлюються і очищаються в даному випадку відповідно до логіки АЛУ. Крім того, біти TO і PD призначені тільки для читання. Тому результат виконання команди з регістром статусу як операндом відрізняється від звичайної логіки. З огляду на це, рекомендується для зміни регістра стану користуватися тільки командами BCF, BSF і MOVWF, тому що ці команди не впливають на біти Z, DC і C.
Таблиця 2.19
Прапорці регістра стану
| Познач. | Біт | Функція |
| С | Біт переносу/позики (змінюється командами ADDWP, SUBWF, RRF і RLF): ADDWF: 1 – перенос, 0 – відсутність переносу; SUBWF : 1 – відсутність позики, 0 – позика; RRF – завантаження старшим бітом операнда; RLF – завантаження молодшим бітом операнда. | |
| DC | Біт десяткового переносу/позики цифри молодшого півбайта (змінюється командами ADDWF і SUBWF): ADDWF: 1 – перенос, 0 – відсутність переносу; SUBWF : 1 – відсутність позики, 0 – позика. | |
| Z | Біт нульового результату: 1 – результат арифметичної або логічної операції нульовий; 0 – результат арифметичної або логічної операції ненульовий. | |
| PD | Біт економічного режиму: 1 – після вмикання живлення або виконання команди CLRWDT: 0 – після виконання команди SLEEP. | |
| TO | Біт тайм-ауту: 1 – після вмикання живлення або виконання команди CLRWDT, SLEEP; 0 – після настання тайм-ауту сторожового таймера. | |
| – | Не визначений, читається 0. | |
| GPWUF | Біт скидання GPIO: 1 – скидання при «пробудженні» від зміни стану на лінії вводу-виводу; 0 – після вмикання живлення або після інших видів скидання. |
– Конец работы –
Эта тема принадлежит разделу:
У 1975 році фірма GI розробила периферійний контролер Peripheral Interface Controller або PIC
СТРУКТУРНА ОРГАНІЗАЦІЯ ТА РЕЖИМИ РОБОТИ ОМК PIC...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Скидання
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.022 сек.
Новости и инфо для студентов