рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Узловой метод получения математических моделей систем
Реферат Курсовая Конспект
Узловой метод получения математических моделей систем
Узловой метод получения математических моделей систем - раздел Механика, МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ Узловой Метод Является Популярным При Создании Программных Комплексов Анализа...
Узловой метод является популярным при создании программных комплексов анализа динамических систем. В качестве вектора базисных координат в этом методе используется вектор переменных типа узловых потенциалов, в качестве топологических уравнений - уравнения типа первого закона Кирхгофа.
 (7),
(7),
где  - вектор переменных, величин типа потенциала, характеризующих состояние узла (скорости, давления, температуры); I - вектор переменных величин типа потока (токи, силы, расходы, тепловые потоки).
- вектор переменных, величин типа потенциала, характеризующих состояние узла (скорости, давления, температуры); I - вектор переменных величин типа потока (токи, силы, расходы, тепловые потоки).
Топологические уравнения типа (7) могут быть получены с помощью матрицы инциденций А:
 (8)
(8)
Из уравнений обобщенного метода получения топологических уравнений уравнение (8) может быть выведено следующим образом. В эквивалентную схему объекта вводятся фиктивные ветви, связывающие все узлы схемы с базовым (базовым может быть любой узел эквивалентной схемы; как правило, это узел, к которому подключено наибольшее количество ветвей). Проводимости этих ветвей равны нулю, т. е. переменная типа I в этих ветвях равна нулю. В дерево включается только эти фиктивные ветви.
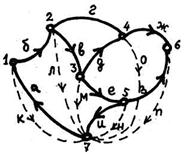
Рис. 5. Матрица инциденций графа.
Для графа, изображенного на рис. 5, без учета ветвей, отмеченных пунктиром, построим матицу инциденций А (таблица 7).
Таблица 7.
| а | б | в | г | д | е | ж | з | и | |
| -1 | +1 | ||||||||
| -1 | +1 | +1 | |||||||
| -1 | +1 | +1 | |||||||
| -1 | -1 | +1 | |||||||
| -1 | +1 | +1 | |||||||
| -1 | -1 |
Для этого же графа с учетом того, что ветви, отмеченные пунктирными линиями, являются его деревом, построим М-матрицу (таблица 8).
Таблица 8.
| к | л | м | о | н | п | |
| а | +1 | |||||
| б | -1 | +1 | ||||
| в | -1 | +1 | ||||
| г | -1 | +1 | ||||
| д | -1 | +1 | ||||
| е | -1 | +1 | ||||
| ж | -1 | -1 | ||||
| з | -1 | +1 | ||||
| и | -1 |
Фиктивные ветви в эквивалентной схеме имеют направление от небазового узла к базовому.
Сравним полученную М-матрицу с матрицей инциденций А. Если каждой фиктивной ветви поставить в соответствие узел, из которого она выходит, то  .
.
Преобразуем общие топологические уравнения:
 (1)
(1)
 (2)
(2)
Так как ветви дерева фиктивные, то  и из уравнения (2) получим
и из уравнения (2) получим  , где I - вектор переменных типа потока реальных ветвей.
, где I - вектор переменных типа потока реальных ветвей.
Из уравнения (1) получим уравнение связи переменных типа потенциала  с переменными типа разности потенциалов U на реальных ветвях. Так как
с переменными типа разности потенциалов U на реальных ветвях. Так как  , то
, то  или
или  .
.
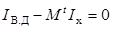
Рис. 6. Граф.
В узловом методе в вектор неизвестных включается вектор  или
или  , компонентные уравнения алгебраизуются так же, как и в табличном методе, но накладывается ограничение на вид компонентного уравнения: оно обязательно должно быть представлено в виде зависимости переменной типа потока от переменной типа потенциала, т.е.
, компонентные уравнения алгебраизуются так же, как и в табличном методе, но накладывается ограничение на вид компонентного уравнения: оно обязательно должно быть представлено в виде зависимости переменной типа потока от переменной типа потенциала, т.е.  , либо от времени.
, либо от времени.
Тогда алгебраизованная и линеаризованная система уравнений приобретает вид
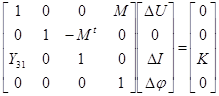 (9)
(9)
где  - матрица частных производных компонентных уравнений по переменным типа разности потенциалов; К - вектор невязок компонентных уравнений.
- матрица частных производных компонентных уравнений по переменным типа разности потенциалов; К - вектор невязок компонентных уравнений.
Исключим из вектора неизвестных подвекторы  и
и  . Из первого уравнения системы (9) имеем
. Из первого уравнения системы (9) имеем  . Подставим это значение в третье уравнение системы, а полученный результат - во второе:
. Подставим это значение в третье уравнение системы, а полученный результат - во второе: 
 , или
, или
 (10)
(10)
где  - матрица Якоби (матрица узловых проводимостей), алгоритм экономического вычисления которой будет рассмотрен ниже;
- матрица Якоби (матрица узловых проводимостей), алгоритм экономического вычисления которой будет рассмотрен ниже;  - вектор сумм переменных типа потока в узлах схемы.
- вектор сумм переменных типа потока в узлах схемы.
Уравнение (10) и есть линеаризованная MMС для узлового метода.
Рассмотрим, что представляет собой матрица  .
.
Для графа, показанного на рис. 6, построим матрицу инциденций (таблица 9), приняв за базовый узел 5.
Таблица 9
| а | б | в | г | д | е | |
| 1 | -1 | -1 | +1 | |||
| 2 | +1 | -1 | ||||
| 3 | +1 | -1 | -1 | |||
| 4 | +1 | -1 |
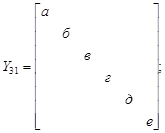
Матрица Y31 при оговоренной структуре компонентных уравнений будет диагональной с размерностью, равной количеству ветвей. Для удобства обозначим  именем ветви, тогда:
именем ветви, тогда:


Покажем, что элементы матрицы Y есть не что иное, как узловые проводимости  . Узловой поток
. Узловой поток
Поток в ветви считается положительным, если направлен от узла:

Предполагая, что  ,
,  ,
,  , получим
, получим  , т. е. элемент y11 и матрицы Y.
, т. е. элемент y11 и матрицы Y.
Аналогично можно определить остальные элементы матрицы. Рассмотрим экономичную процедуру формирования матрицы Якоби: поочередно выбирается каждая ветвь эквивалентной схемы. Пусть очередная k-я ветвь включена между узлами с номерами i и j. Тогда проводимость этой ветви  даст слагаемое в элементы матрицы
даст слагаемое в элементы матрицы  и
и  со знаком плюс, а в элементы
со знаком плюс, а в элементы  и
и  - со знаком минус.
- со знаком минус.
Отличительная черта узлового метода - простое формирование ММС, имеющих в своем составе многополюсные элементы. Допустим, есть элемент, включенный между тремя узлами с номерами i, j, k. Тогда этот элемент даст слагаемые в элементы матрицы Якоби:
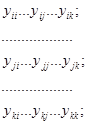
Примечание. В матрице Якоби многополюсник представлен только своими внешними узлами, в то время как может иметь и внутренние.
При применении узлового метода в эквивалентной схеме допускаются и зависимые ветви, но аргументами функциональных зависимостей должны быть только элементы вектора . Допустим, переменная типа потока в k-й ветви, включенной между узлами с номерами i и j, зависит от переменных величин типа потенциала в l-м m-м узлах:
 .
.
Тогда эта зависимость приведет к появлению следующих элементов матрицы:

Достоинство узлового метода - простота формирования матрицы Якоби и низкий порядок получаемой системы уравнений, поскольку именно для этого метода характерно предварительное исключение большого числа неизвестных из обобщенного базиса.
Недостаток узлового метода - ограничения, накладываемые на тип используемых элементов: в узловом методе, запрещены идеальные источники переменной типа разности потенциалов, а также ветви, зависимые от переменных типа потока. Эти недостатки в узловом методе можно устранить введением специальных ветвей, которые не должны искажать физических процессов в объекте. Последовательно с идеальным источником типа разности потенциалов включается ветвь типа R, благодаря чему этот источник можно свести к источнику типа потока (рис. 8).

Рис. 8. Преобразование источника типа Е в источник типа I.
Последовательно с ветвями, потоки через которые являются управляющими, включается ветвь, у которой связь между переменными типа потока и типа разности потенциалов - линейная, т. е. ветвь типа R. Тогда зависимость от переменной типа потока через ветвь может быть заменена зависимостью от разности потенциалов на этой вспомогательной ветви.
Объясним сказанное. Пусть есть зависимый источник потока с компонентным уравнением  , где
, где  - поток через управляющую ветвь, последовательно с ней включается ветвь типа R с компонентным уравнением
- поток через управляющую ветвь, последовательно с ней включается ветвь типа R с компонентным уравнением  тогда компонентное уравнение зависимого источника можно записать в виде
тогда компонентное уравнение зависимого источника можно записать в виде  .
.
Преобразования эквивалентной схемы, выполняемые для снятия ограничений в узловом методе, не всегда удобны для пользователя, более формально подобные ограничения снимаются в модифицированном узловом методе. Он получается, если базис узлового метода расширить переменными типа потока управляющих ветвей и источников типа разности потенциалов. Поскольку увеличивается количество неизвестных, соответственно должно увеличиться количество уравнений. Уравнения узлового метода дополняются компонентными уравнениями управляющих ветвей и источников типа разности потенциалов. Аддитивный вклад модели в левую и правую части системы уравнений  :
:

Здесь  и
и  - потенциалы узлов 1 и 2, к которым подключен источник; IЕ - ток, протекающий через источник (значения IЕ определяются по результатам предыдущих итераций);
- потенциалы узлов 1 и 2, к которым подключен источник; IЕ - ток, протекающий через источник (значения IЕ определяются по результатам предыдущих итераций);  - приращения соответствующих переменных.
- приращения соответствующих переменных.
Достоинство модифицированного узлового метода - получение ММС сравнительно невысокого порядка при практически любых зависимых ветвях, недостаток - дискретизация компонентных уравнений реактивных ветвей методами интегрирования, в результате чего смена метода интегрирования может привести к необходимости смены всех подпрограмм элементов, содержащих реактивные элементы, т. е. библиотека методов интегрирования САПР в этом случае жестко связана с библиотекой моделей элементов.
– Конец работы –
Эта тема принадлежит разделу:
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ
На сайте allrefs.net читайте: "МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ"
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Узловой метод получения математических моделей систем
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.026 сек.
Новости и инфо для студентов