рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ
Реферат Курсовая Конспект
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ - раздел Механика, Математическое Моделирование ...
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ТЕХНИЧЕСКИХ ОБЪЕКТОВ
ВВЕДЕНИЕ. 2 1 КЛАССИФИКАЦИЯ И МЕТОДЫ ПОЛУЧЕНИЯ ММ.. 3 1.1 Классификация математических моделей. 3ВВЕДЕНИЕ
Проектирование технического объекта связано с созданием, преобразованиями и представлением в принятой форме образа этого объекта. Образ объекта или его составных частей может создаваться в воображении человека в результате творческого процесса или генерироваться по некоторым алгоритмам в процессе взаимодействия человека и ЭВМ. В любом случае проектирование начинается при наличии задания на проектирование, которое отражает потребности общества в получении некоторого технического изделия. Это задание представляется в виде тех или иных документов и является исходным (первичным) описанием объекта. Результатом проектирования, как правило, служит полный комплект документации, содержащий достаточные сведения для изготовления объекта в заданных условиях. Эта документация представляет собой окончательное описание объекта.
Проектирование - процесс, заключающийся в преобразовании исходного описания объекта в окончательное описание на основе выполнения комплекса работ исследовательского, расчетного и конструкторского характера.
Преобразование исходного описания в окончательное порождает промежуточные описания, которые являются предметом рассмотрения с целью определения окончания проектирования или выбора путей его продолжения. Такие описания называют проектными решениями.
Проектирование, при котором все или часть проектных решений получают путем взаимодействия человека и ЭВМ, называют автоматизированным, а проектирование, при котором ЭВМ не используется, - неавтоматизированным.
Проектирование как процесс, развивающийся во времени, расчленяется на стадии, этапы, проектные процедуры и операции.
При проектировании сложных систем выделяют стадии предпроектных исследований, технического задания и технического предложения, эскизного, технического, рабочего проектов, испытаний и внедрения.
На стадиях предпроектных исследований, технического задания и технического предложения, на основании изучения потребностей общества в получении новых изделий, научно-технических достижений в данной и смежной отраслях промышленности, имеющихся ресурсов, определяют назначение, основные принципы построения технического объекта и формулируют техническое задание (ТЗ) на его проектирование. Эти стадии называют также стадиями научно-исследовательских работ (НИР).
На стадии эскизного проекта (иначе стадии опытно-конструкторских работ - ОКР) проверяется корректность и реализуемость основных принципов и положений, определяющих функционирование будущего объекта, и создается его эскизный проект.
На стадии технического проекта выполняется всесторонняя проработка всех частей проекта, конкретизируются и детализируются технические решения.
На стадии рабочего проекта формируется вся необходимая документация для изготовления изделия. Далее создается и испытывается опытный образец или пробная партия изделий, по результатам испытаний вносятся необходимые коррективы в проектную документацию, после чего осуществляется внедрение в производство на выбранном предприятии.
Этап проектирования - часть процесса проектирования, включающая в себя формирование всех требующихся описаний объекта, относящихся к одному или нескольким иерархическим уровням и аспектам. Часто названия этапов совпадают с названиями соответствующих иерархических уровней и аспектов. Так, проектирование технологических процессов расчленяют на этапы разработки принципиальных схем технологического процесса, маршрутной технологии, операционной технологии и получения управляющей информации на машинных носителях для программно-управляемого технологического оборудования.
Составные части этапа проектирования называют проектными процедурами. Проектная процедура - часть этапа, выполнение которой заканчивается получением проектного решения. Каждой проектной процедуре соответствует некоторая задача проектирования, решаемая в рамках данной процедуры. Более мелкие составные части процесса проектирования, входящие в состав проектных процедур, называют проектными операциями. Примерами проектных процедур могут служить: оформление чертежа изделия, расчет параметров усилителя, выбор типовой конструкции для построения электродвигателя, а примерами проектных операций - вычерчивание типового графического изображения (зубчатого зацепления, рамки чертежа и т. п.), решение системы алгебраических уравнений, описывающих статическое состояние усилителя, расчет показателей эффективности очередного варианта построения электродвигателя.
Понятия уровня и аспекта относятся к структурированию представлений о проектируемом объекте, а понятие этапа - к структурированию процесса проектирования.
Окончательное описание проектируемого объекта представляет собой полный комплект схемной, конструкторской и технологической документации, предназначенной для использования в процессе изготовления и эксплуатации этого объекта. Важное значение в этих описаниях имеют математические модели объектов проектирования, так как выполнение проектных процедур при автоматизированном проектировании основано на оперировании математическими моделями. При проектировании используют математические модели, отражающие свойства объекта, существенные с позиции инженера.
Современный инженер обязан представлять особую роль математических моделей и анализа проектных решений при проектировании технических объектов. Создание и сопровождение программно-методических комплексов проектирования невозможно без четкого осмысления методов и алгоритмов реализуемых в них.
Математическое обеспечение автоматизированного проектирования включает в себя математические модели объектов проектирования, методы и алгоритмы выполнения проектных процедур.
КЛАССИФИКАЦИЯ И МЕТОДЫ ПОЛУЧЕНИЯ ММ
В автоматизированных проектных процедурах вместо еще не существующего проектируемого объекта оперируют некоторым квазиобъектом - моделью, которая отражает некоторые интересующие исследователя свойства объекта. Модель может быть физическим объектом (макет, стенд) или спецификацией. Среди моделей-спецификаций различают функциональные, поведенческие, информационные в виде диаграмм сущность - отношение, структурные модели (описания). Эти модели называют математическими, если они формализованы средствами аппарата и языка математики. Математические модели могут быть геометрическими, топологическими, динамическими, логическими и т. п., если они отражают соответствующие свойства объектов. Наряду с математическими моделями при проектировании используют функциональные EDEF0-модели, геометрические модели-чертежи.
Математическая модель (ММ) - совокупность математических объектов (чисел, символов, множеств и т. д.) и связей между ними, отражающих важнейшие для проектировщика свойства проектируемого технического объекта.
Математические модели (ММ) служат для описания свойств объектов в процедурах автоматизированного проектирования. Если проектная процедура включает создание ММ и оперирование ею с целью получения полезной информации об объекте, то говорят, что процедура выполняется на основе математического моделирования.
Классификация математических моделей
Основные признаки классификации и типы ММ, применяемые в САПР, даны в таблице 1.
Таблица 1.
| Признак классификации | Математические модели |
| Характер отображаемых свойств объекта | Структурные; функциональные |
| Принадлежность к иерархическому уровню | Микроуровня; макроуровня; метауровня |
| Степень детализации описания внутри одного уровня | Полные; макромодели |
| Способ представления свойств объекта | Аналитические, алгоритмические, имитационные |
| Способ получения модели | Теоретические, эмпирические |
По характеру отображаемых свойств объекта ММ делятся на структурные и функциональные.
СтруктурныеММ предназначены для отображения структурных свойств объекта. Различают структурные ММ топологические и геометрические.
В топологических ММ отображаются состав и взаимосвязи элементов объекта. Топологические модели могут иметь форму графов, таблиц (матриц), списков и т. п.
В геометрических ММ отображаются геометрические свойства объектов, в них дополнительно к сведениям о взаимном расположении элементов содержатся сведения о форме деталей. Геометрические ММ могут выражаться совокупностью уравнений линий и поверхностей; алгебрологических соотношений, описывающих области, составляющие тело объекта; графами и списками, отображающими конструкции из типовых конструктивных элементов и т. п.
Функциональные ММ предназначены для отображения физических или информационных процессов, протекающих в объекте при его функционировании или изготовлении. Функциональные ММ представляют собой системы уравнений, связывающих фазовые переменные, внутренние, внешние и выходные параметры, т.е. алгоритм вычисления вектора выходных параметров Y при заданных векторах параметров элементов X и внешних параметров Q.
Количество иерархических уровней при моделировании определяется сложностью проектируемых объектов и возможностью средств проектирования. Однако для большинства предметных областей можно отнести имеющиеся иерархические уровни к одному из трех обобщенных уровней, называемых далее микро-, макро- и метауровнями.
В зависимости от места в иерархии описаний математические модели делятся на ММ, относящиеся к микро-, макро- и метауровням.
Особенностью ММ на микроуровне является отражение физических процессов, протекающих в непрерывных пространстве и времени. Типичные ММ на микроуровне - дифференциальные уравнения в частных производных (ДУЧП).
На макроуровне используют укрупненную дискретизацию пространства по функциональному признаку, что приводит к представлению ММ на этом уровне в виде систем обыкновенных дифференциальных уравнений (ОДУ). Системы ОДУ являются универсальными моделями на макроуровне, пригодными для анализа как динамических, так и установившихся состояний объектов. Модели для установившихся режимов можно также представить и виде систем алгебраических уравнений. Порядок системы уравнений зависит от числа выделенных элементов объекта. Если порядок системы приближается к 103, то оперирование моделью становится затруднительным и поэтому необходимо переходить к представлениям на метауровне.
На метауровне в качестве элементов принимают достаточно сложные совокупности деталей. Метауровень характеризуется большим разнообразием типов используемых ММ. Для многих объектов ММ на метауровне по-прежнему представляются системами ОДУ. Однако так как в моделях не описываются внутренние для элементов фазовые переменные, а фигурируют только фазовые переменные, относящиеся к взаимным связям, элементов, то укрупнение элементов на метауровне означает получение ММ приемлемой размерности для существенно более сложных объектов, чем на макроуровне.
В ряде предметных областей удается использовать специфические особенности функционирования объектов для упрощения ММ. Примером являются электронные устройства цифровой автоматики, в которых возможно применять дискретное представление таких фазовых переменных, как напряжения и токи. В результате ММ становится системой логических уравнений, описывающих процессы преобразования сигналов. Такие логические модели существенно более экономичны, чем модели электрические, описывающие изменения напряжений и сил токов как непрерывных функций времени. Важный класс ММ на метауровне составляют модели массового обслуживания, применяемые для описания процессов функционирования информационных и вычислительных систем, производственных участков, линий и цехов.
Структурные модели также делятся на модели различных иерархических уровней. При этом на низших иерархических уровнях преобладает использование геометрических моделей, на высших иерархических уровнях используются топологические модели.
По степени детализации описания в пределах каждого иерархического уровня выделяют полные ММ и макромодели.
Полная ММ - модель, в которой фигурируют фазовые переменные, характеризующие состояния всех имеющихся межэлементных связей (т. е. состояния всех элементов проектируемого объекта), описывающая не только процессы на внешних выводах моделируемого объекта, но и внутренние процессы объекта.
Макромодель - ММ, в которой отображаются состояния значительно меньшего числа межэлементных связей, что соответствует описанию объекта при укрупненном выделении элементов.
Примечание. Понятия «полная ММ» и «макромодель» относительны и обычно используются для различения двух моделей, отображающих различную степень детальности описания свойств объекта.
По способу представления свойств объекта функциональные ММ делятся на аналитические и алгоритмические.
Аналитические ММ представляют собой явные выражения выходных параметров как функций входных и внутренних параметров. Такие ММ характеризуются высокой экономичностью, но получение явного выражения удается лишь в отдельных частных случаях, как правило, при принятии существенных допущений и ограничений, снижающих точность и сужающих область адекватности модели.
Алгоритмические ММ выражают связи выходных параметров с параметрами внутренними и внешними в форме алгоритма.
Имитационная ММ - алгоритмическая модель, отражающая поведение исследуемого объекта во времени при задании внешних воздействий на объект. Примерами имитационных ММ могут служить модели динамических объектов в виде систем ОДУ и модели систем массового обслуживания, заданные в алгоритмической форме.
Обычно в имитационных моделях фигурируют фазовые переменные. Так, на макроуровне имитационные модели представляют собой системы алгебро-дифференциальных уравнений:
 (1)
(1)
где V - вектор фазовых переменных; t - время; Vo - вектор начальных условий. К примерам фазовых переменных можно отнести токи и напряжения в электрических системах, силы и скорости - в механических, давления и расходы - в гидравлических.
Выходные параметры систем могут быть двух типов. Во-первых, это параметры-функционалы, т. е. функционалы зависимостей V(t) в случае использования (1). Примеры таких параметров: амплитуды сигналов, временные задержки, мощности рассеивания и т. п. Во-вторых, это параметры, характеризующие способность проектируемого объекта работать при определенных внешних условиях. Эти выходные параметры являются граничными значениями диапазонов внешних переменных, в которых сохраняется работоспособность объекта.
При проектировании технических объектов можно выделить две основные группы процедур: анализ и синтез. Для синтеза характерно использование структурных моделей, для анализа - использование функциональных моделей. К математическому обеспечению анализа относятся математические модели, численные методы, алгоритмы выполнения проектных процедур. Компоненты МО определяются базовым математическим аппаратом, специфичным для каждого из иерархических уровней проектирования.
В САПР анализ выполняется математическим моделированием.
Математическое моделирование - процесс создания модели и оперирование ею с целью получения сведений о реальном объекте.
Моделирование большинства технических объектов можно выполнять на микро-, макро и метауровнях, различающихся степенью детализации рассмотрения процессов в объекте.
Математической моделью технического объекта на микроуровне, называемого распределенным, является система дифференциальных уравнений в частных производных (ДУПЧ), описывающая процессы в сплошной среде с заданными краевыми условиями. Независимыми переменными являются пространственные координаты и время. К моделям на микроуровне относятся многие сравнения математической физики. Объектами исследования являются поля физических величин, что требуется при анализе прочности строительных сооружений или машиностроительных деталей, исследовании процессов в жидких средах, моделировании концентраций и потоков частиц в электронных приборах и т. п. С помощью этих уравнений рассчитываются поля механических напряжений и деформаций, электрических потенциалов, давлений, температур и т.д. Возможности применения ММ в виде ДУЧП ограничены отдельными деталями, попытки анализировать с их помощью процессы в многокомпонентных средах, сборочных единицах, электронных схемах не могут быть успешными из-за чрезмерного роста затрат машинного времени и памяти.
Система дифференциальных уравнений, как правило, известна (уравнения Ламе для механики упругих сред; уравнения Навье-Стокса для гидравлики; уравнения теплопроводности для термодинамики и т.д.), но точное решение ее удается получить лишь для частных случаев, поэтому первая задача, возникающая при моделировании, состоит в построении приближенной дискретной модели. Для этого используются методы конечных разностей и интегральных граничных уравнений, одним из вариантов последнего является метод граничных элементов.
Число совместно исследуемых различных сред (число деталей, слоев материала, фаз агрегатного состояния) в практически используемых моделях микроуровня не может быть большим ввиду сложностей вычислительного характера. Резко снизить вычислительные затраты в многокомпонентных средах можно, только применив иной подход к моделированию, основанный на принятии определенных допущений.
Допущение, выражаемое дискретизацией пространства, позволяет перейти к моделям макроуровня, называемым сосредоточенными. Математической моделью технического объекта на макроуровне является система алгебраических и обыкновенных дифференциальных уравнений (ОДУ) с заданными начальными условиями.
В этих уравнениях независимой переменной является время t, а вектор зависимых переменных V составляют фазовые переменные, характеризующие состояние укрупненных элементов дискретизированного пространства. Такими переменными являются силы и скорости механических систем, напряжения и силы тока электрических систем, давления и расходы гидравлических и пневматических систем и т.п.
В основе ММ лежат компонентные уравнения отдельных элементов и топологические уравнения, вид которых определяется связями между элементами. Предпосылкой создания единого математического и программного обеспечения анализа на макроуровне являются аналогии компонентных и топологических уравнений физически однородных подсистем, из которых состоит технический объект. Для получения топологических уравнений используются формальные методы.
Методы получения ММ
· Обобщенный метод; · Табличный метод; · Узловой метод;Требования к математическим моделям и численным методам в САПР
Степень универсальности ММ характеризует полноту отображения в модели свойств реального объекта. Математическая модель отражает лишь некоторые… Точность ММ оценивается степенью совпадения значений параметров реального… (2)Методика получения математических моделей элементов
1. Выбор свойств объекта, которые подлежат отражению в модели. Этот выбор основан на анализе возможных применений модели и определяет степень… 2. Сбор исходной информации о выбранных свойствах объекта. Источниками… 3. Синтез структуры ММ. Структура ММ - общий вид математических соотношений модели без конкретизации числовых…ПОСТАНОВКА ЗАДАЧИ АНАЛИЗА ОБЪЕКТОВ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
Постановка задачи
Рассмотрим примеры уравнений, составляющих основу моделей объектов на микроуровне. Первая важная задача проектирования летательного аппарата -… Напряженное состояние деталей конструкции в зависимости от геометрии… (1.1),Краевые условия
Граничные условия в краевых задачах могут задаваться различными способами. На границе рассматриваемой области можно задать: а. значение искомой функции; б. значения производных по пространственным координатам от искомой функции;Приближенные модели объектов на микроуровне
Основная идея построений модели на основе интегральных уравнений заключается в переходе от исходного дифференциального уравнения в частных… Сущность метода сеток состоит в аппроксимации искомой непрерывной функции… Применение метода сеток позволяет свести дифференциальную краевую задачу к системе нелинейных в общем случае…Метод конечных разностей
Среди сеточных методов наибольшее распространение получили два метода: метод конечных разностей (МКР) и метод конечных элементов (МКЭ). Обычно… Метод конечных разностей исторически начал развиваться раньше МКЭ и является… Алгоритм МКР состоит из этапов, традиционных для метода сеток:Построение сетки в заданной области
Для одномерных областей построение сеток мало чем отличается от аналогичной процедуры в МКР. Отрезок длиной L разбивается на N частей (рис. 1, а).…Замена дифференциального оператора разностным аналогом
Эту процедуру легко проиллюстрировать на следующем простом примере. Пусть непрерывная функция  , определенная на отрезке (рис. 1, а), описывается дифференциальным уравнением
, определенная на отрезке (рис. 1, а), описывается дифференциальным уравнением
 (1)
(1)
где А - константа; задано также граничное условие  и при дискретизации области была построена сетка с постоянным шагом h.
и при дискретизации области была построена сетка с постоянным шагом h.
Заменим дифференциальный оператор  разностным:
разностным:
 (2)
(2)
Где  - правая разностная производная.
- правая разностная производная.
Подставив (2) в (1), получим разностное уравнение
 (3)
(3)
Умножив (3) на h и полагая последовательность х=0, h, 2h, …, перейдем к системе алгебраических уравнений:
 (4)
(4)
Решая (4) относительно сеточной функции, найдем таблицу значений, аппроксимирующую решение краевой задачи (1). При уменьшении шага h сетка становится все «гуще», а таблица значений сеточной функции - все подробнее. При неограниченном стремлении шага к нулю можно было бы получить значение искомой функции в каждой точке области. Но, в реальных случаях степень приближения к точному решению ограничивается рядом факторов, важнейшим из которых является размерность результирующей системы уравнений (4).
Для аппроксимации дифференциального оператора разностным кроме (2) часто пользуются выражением:
 (5)
(5)
Где  - левая разностная производная.
- левая разностная производная.
Кроме того, для аппроксимации  , можно воспользоваться любой линейной комбинацией (2)-(5), т.е.
, можно воспользоваться любой линейной комбинацией (2)-(5), т.е.

Где  - любая вещественная константа.
- любая вещественная константа.
При  дифференциальный оператор
дифференциальный оператор  аппроксимируется центральной разностной производной.
аппроксимируется центральной разностной производной.
 (6)
(6)
Подставив (6) в (1), получим другой разностный аналог краевой задачи (1):
 .
.
Удобным геометрическим изображением схем построения разностных производных являются шаблоны.
На рис. 2 приведены шаблоны, соответствующие правой (рис. 2, а), левой (рис.2, б) и центральной (рис. 2, в) разностным производным.

Рис. 2. Примеры шаблонов в одномерной области, соответствующих разностным производным: а – правой, б – левой, в – центральной.
При переходе от дифференциальной краевой задачи к разностной необходимо также аппроксимировать граничные условия. В рассмотренном примере (1) граничные условия при использовании (2) можно аппроксимировать точно:
 (7)
(7)
Совокупность разностного уравнения и разностных краевых условий называется разностной схемой краевой задачи.
В нашем примере уравнения (3) и (7) являются разностной схемой краевой задачи (1).
Кажущаяся простота построения разностной схемы в рассмотренном примере обманчива. В реальных задачах при построении разностных схем возникают проблемы. При исследовании разностных схем даже простых линейных задач часто выясняется, что разностная схема дает решение, не сходящееся при измельчении сетки к точному решению дифференциальной задачи. Поэтому построение сходящейся разностной схемы – центральный и наиболее сложный вопрос МКР.
Понятие сходимости разностной схемы тесно связано с понятиями точности и устойчивости.
Пусть точное значение непрерывной функции в узле с координатой x=xh равно  , а полученное значение точной функции в том же узле
, а полученное значение точной функции в том же узле  . Если погрешность
. Если погрешность  стремится к нулю при стремлении к нулю шага h и имеет k-й порядок относительного шага, то принято говорить, что разностная схема имеет k-й порядок точности в n-м узле.
стремится к нулю при стремлении к нулю шага h и имеет k-й порядок относительного шага, то принято говорить, что разностная схема имеет k-й порядок точности в n-м узле.
Аналогично для определения порядка аппроксимации вычисляют погрешность между точным  и приближенным
и приближенным  значениями производной в n-м узле:
значениями производной в n-м узле: 
При этом порядок погрешности  относительно шага впадает с порядком аппроксимации дифференциального
относительно шага впадает с порядком аппроксимации дифференциального  разностным
разностным  оператором в n-м узле.
оператором в n-м узле.
Для определения порядка точности многих практических разностных схем достаточно определить порядок аппроксимации дифференциального оператора разности, так как порядки точности и аппроксимации для них совпадают. Однако разностная схема, для которой такое подтверждение может быть доказано, должна обладать еще одним важным свойством - устойчивостью.
Устойчивая разностная схема - схема, в которой не происходит наращивания малых ошибок округления, допущенных на начальных стадиях решения.
Для многих краевых задач сходимость разностной схемы является следствием аппроксимации ею краевой задачи и устойчивости. При этом порядок сходимости относительно шага совпадает с порядком аппроксимации.
Для гладких неразрывных функций хорошо развит математический аппарат изучения аппроксимации и доказательства устойчивости разностных схем.
Необходимость исследования сходимости впервые построенной разностной схемы обусловливает тот факт, что основу программных реализаций в САПР составляют вполне конкретные, хорошо изученные для определенных задач разностные схемы.
Метод конечных элементов
К основным преимуществам МКЭ относят доступность и простоту его понимания и применимость метода для задач с произвольной формой области решения,… В МКЭ исходная область определения функции разбивается с помощью сетки, в… Для двухмерных областей наиболее часто используются элементы в форме треугольников и четырехугольников. При этом…Определение вектора узловых значений функций
Для этой цели используется несколько методов.
Метод, основанный на вариационной постановке задачи
Пример минимизации функционала в задаче о нахождении распределения температуры в стержне (рис. 7). Рис. 7. Пример минимизации функционала при нахождении распределения температуры в стержне.Метод Галеркина
Метод Галеркина основан на минимизации ошибки приближенного решения u исходного дифференциального уравнения , где L - дифференциальный оператор. Для минимизации в заданной области G требуется выполнение равенства для каждой… Сочетание метода Галеркина с МКЭ приводит к системе уравненийМетод граничных элементов
Примером указанного подхода к решению краевых задач служат методы интегральных граничных элементов (МГЭ). Развитие МГЭ началось сравнительно… Все МГЭ строятся на основе общих принципов. При этом различают прямые и… В прямых МГЭ искомыми переменными краевой задачи являются величины, имеющие реальный физический смысл, например, в…Переход от исходного дифференциального уравнения интегральному
(1), которое является частным случаем квазигармонического уравнения (1.1) при . На границе L рассматриваемой области заданны граничные условия первого родаДискретизация границы рассматриваемой области
(6) где - координата средней точки q-го граничного элемента. Уравнение (6) определяет значение функции в средней точке q-го граничного элемента.ПОСТАНОВКА ЗАДАЧИ АНАЛИЗА ОБЪЕКТОВ С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ
Поведение большинства технических подсистем; можно охарактеризовать с помощью фазовых переменных. Фазовые переменные образуют вектор неизвестных в… Математическую модель системы получают объединением компонентных и… Законы функционирования элемента подсистемы (элемента) задаются компонентными уравнениями, связывающими, как правило,…Аналогии компонентных уравнений
A. Элемент типа R - элемент диссипации энергии. На этом элементе, как правило, происходит преобразование энергии в тепловую. Б. Элемент типа С. B. Элемент типа L.Электрическая подсистема
A. Уравнение сопротивления (закон Ома) , где R - электрическое сопротивление. Б. Уравнение емкости , где С - электрическая емкость. B. Уравнение индуктивности , где L - электрическая индуктивность.Механическая поступательная подсистема
А. Уравнение вязкого трения , где - аналог электрического сопротивления; k – коэффициент вязкого трения. Б. Уравнение массы (уравнение второго закона Ньютона) , где - ускорение, -… В. Уравнение пружины , где х - перемещение, k - жесткость пружины.Механическая вращательная подсистема
А. Уравнение вязкого трения вращения , - аналог электрического сопротивления; k - коэффициент трения вращения. Б. Основное уравнение динамики вращательного движения , где - аналог… С. Уравнение кручения бруса с круглым поперечным сечением , где М - крутящий момент; G - момент сдвига; Jp - полярный…Гидравлическая (пневматическая) подсистема
А. Уравнение для участка трубопровода при стационарном ламинарном течении жидкости , где - аналог электрического сопротивления (- кинематическая… Б. Уравнение сжимаемости жидкости в некотором объеме V при воздействии…Тепловая подсистема
А. Из соответствующих уравнений законов Фурье и Ньютона для теплопроводности и конвекции , где - плотность теплового потока; - коэффициент… Для получения теплового потока умножим обе части уравнений на площадь S… Б. Уравнение теплоемкости тела , где - изменение количества теплоты в теле при изменении температуры на dT. Так как…Аналогии топологических уравнений
Топологические уравнения в большинстве физических подсистем базируются на уравнениях равновесия и уравнениях непрерывности.
Рассмотрим аналогии топологических уравнений в различных физических подсистемах по отношению к электрической подсистеме.
Электрическая подсистема
Уравнение первого закона Кирхгофа устанавливает равенство нулю суммы токов в узлах схемы, т. е. (уравнение равновесия), где - ток k-ой ветви; р -… Из уравнения второго закона Кирхгофа видно, что сумма падений напряжений на…Механическая поступательная подсистема
Аналогом уравнения второго закона Кирхгофа будет уравнение принципа сложения скоростей: абсолютная скорость является суммой относительной и… Для механических плоскостных и пространственных систем рассмотренные принципы…Механическая вращательная подсистема
Аналогом уравнения второго закона Кирхгофа является уравнение принципа сложения угловых скоростей вдоль оси вращения, т. е. .Гидравлическая (пневматическая) подсистема
Аналогом уравнения второго закона Кирхгофа является уравнение неразрывности подсистемы, т. е. - сумма падений давлений при обходе по контуру равна…Тепловая подсистема
Аналогом уравнения второго закона Кирхгофа является уравнение непрерывности, т. е. - сумма разностей температур при обходе по замкнутому контуру… Таким образом, во всех рассмотренных подсистемах можно установить аналогии…Эквивалентные схемы технических объектов
1) выделить в объекте однородные физические подсистемы, например механическую, гидравлическую, электрическую и т. д.; 2) получить эквивалентные схемы каждой из подсистем; 3) установить связи между подсистемами;Эквивалентные схемы механических поступательных подсистем
Внешние усилия, прикладываемые к механической системе, отображаются включением источника силы между базовым узлом и тем узлом, к которому подключен…Пример механической поступательной системы
На рис. 4, а изображена механическая поступательная система, а на рис. 4, б - ее эквивалентная схема для движения вдоль горизонтальной оси.
Автомобиль массой  везет груз массой
везет груз массой  , прицеп массой
, прицеп массой  с подпружиненным в нем грузом массой
с подпружиненным в нем грузом массой  . Узлам схемы соответствуют скорости, ветвям - усилия.
. Узлам схемы соответствуют скорости, ветвям - усилия.
На рис. 4, б … - вышеназванные массы; F - тяга автомобиля; R1 и R3 - приведенные коэффициенты трения автомобиля и прицепа о землю; R2 и R4 - коэффициенты трения грузов с кузова автомобиля и прицепа; UP1 - упругость сцепки; UP2 - упругость пружин, удерживающих груз массой
- вышеназванные массы; F - тяга автомобиля; R1 и R3 - приведенные коэффициенты трения автомобиля и прицепа о землю; R2 и R4 - коэффициенты трения грузов с кузова автомобиля и прицепа; UP1 - упругость сцепки; UP2 - упругость пружин, удерживающих груз массой  .
.
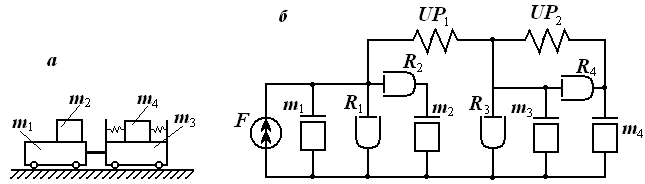
Рис. 4. Пример механической поступательной системы (а) и ее эквивалентная схема (б).
Пример механической поступательной системы с рычагом
На рис. 5, а изображена рычажная система.
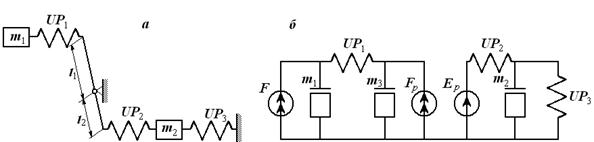
Рис. 5. Пример рычажной механической системы (а) и ее эквивалентная схема (б).
При малых перемещениях такую систему можно считать поступательной. Рычаг изображен на эквивалентной схеме (рис. 5, б) двумя зависимыми источниками Fp и Ер. Он представляет собой трансформатор сил и скоростей:  ;
;  ,
,  , здесь
, здесь  - усилие (в ветви источника скорости Ер), воздействующее на пружину UP2,
- усилие (в ветви источника скорости Ер), воздействующее на пружину UP2,  - скорость на верхнем конце рычага (скорость
- скорость на верхнем конце рычага (скорость  или же Fp); l1 и l2 - соответствующие плечи рычага.
или же Fp); l1 и l2 - соответствующие плечи рычага.
Обозначения элементов системы и эквивалентной схемы совпадают; - масса пружины UP1, массами остальных пружин пренебрегаем.
Эквивалентные схемы вращательных механических систем
В таких схемах базовый узел, как правило, соответствует неподвижной (невращающейся) части объекта. Ветвь, изображающая момент инерции, включается между базовым узлом и узлом, через который осуществляется взаимодействие тела с данным моментом инерции с телами, находящимися с ним на одной оси вращения.
Пример модели муфты сцепления автомобиля
Примером, когда ветвь типа R включается между двумя небазовыми узлами, может служить эквивалентная схема муфты сцепления автомобиля, составленная для вращательного движения (рис. 6, б). На рис. 6, а схематично изображена муфта сцепления.

Рис. 6. Схематичное изображение муфты сцепления (а) и ее эквивалентная схема (б).
На рис. 6 М1 - момент на входном валу; М2 - нагрузка на выходном валу муфты; R1 и R2 - коэффициенты трения в подшипниках; L1 и L2 - крутильные гибкости валов;  и
и  - моменты инерции ведущего и ведомого дисков муфты;
- моменты инерции ведущего и ведомого дисков муфты;  - коэффициент трения между дисками сцепления.
- коэффициент трения между дисками сцепления.
При составлении эквивалентных схем вращательных механических систем особое внимание следует обратить на направление источников моментов и скоростей. На рис. 7, а представлен случай, когда моменты М1 и М2 противодействуют друг другу, а на рис. 7. б - случай, когда моменты М1 и М2 действуют в одном направлении.
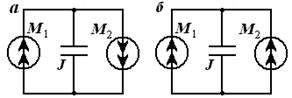
Рис. 7. Схемы встречного включения источников момента (а) и согласного включения источников момента (б).
Примечание. Аналогичное замечание справедливо и для источников силы в механических поступательных подсистемах.
Эквивалентные схемы гидравлических (пневматических) подсистем
Примечание. Гидравлическая и пневматическая подсистемы аналогичны. Резервуары изображаются на эквивалентных схемах гидравлических подсистем…Пример фрагмента гидравлической подсистемы
На рис. 8, а представлен фрагмент гидравлической подсистемы, а на рис. 8, б - его эквивалентная схема.
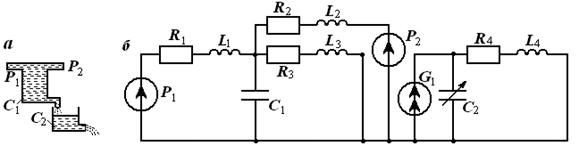
Рис. 8. Пример гидравлической подсистемы (а) и ее эквивалентная схема (б).
В узлах схемы определяются давления, расходы распределены по ветвям. Трубопроводы отображены гидравлическими сопротивлениями R1, ..., R4 и гидравлическими индуктивностями L1, …, L4, Р1 и Р2 - источники давлений; C1 - гидравлическая емкость; зависимый источник расхода G1 равен расходу через элементы R3 и L3, переменная гидравлическая емкость С2 определяется через заполненность сосуда, т.е.  .
.
Эквивалентные схемы тепловых подсистем
Если в MM элементов используются значения температур, то за базовый узел в таких подсистемах может приниматься условное тело с температурой 0 К или 0°С или, если в MМ используются только разности температур, произвольная точка подсистемы. В узлах эквивалентной схемы определяются либо абсолютные температуры, либо перегрев относительно базового узла; тепловые потоки распределяются по ветвям схемы.
Эквивалентные схемы электрических подсистем
Под схемой замещения понимается эквивалентная схема сложного радиокомпонента, составленная из двухполюсников. На рис. 9, а представлена схема двухкаскадного усилителя, а на рис. 9, б - его…Рекомендации к составлению эквивалентных схем
Примечание. Приведенные выше замечания в основном относятся к подключению входных источников, но и для зависимых источников их учет также…Типы связей между подсистемами различной физической природы
Можно выделить три типа связей: 1) трансформаторная При трансформаторном типе связи в одной подсистеме включается зависимый источник разности потенциалов. Этот источник…Пример трансформаторного типа связи
На рис. 11, а представлен электромеханический вибратор, на рис. 11, б - его эквивалентная схема.

Рис. 11. Пример электромеханического вибратора (а) и его эквивалентная схема (б).
Источник силы F, воздействующий на массу т, зависит от скорости изменения электромагнитного поля, т. е. от тока через катушку электромагнита, или, что то же самое, от тока через источник противо-э.д.с. Е2, который зависит от скорости движения массы т, Е1 - входное синусоидальное напряжение; R - активное сопротивление обмотки электромагнита.
Использование схемы рис. 10, а или 10, б определяются из физических соображений или же из учета последовательного и параллельного подключения источников.
2) гираторная
При гираторном типе связи в обеих физических подсистемах включаются зависимые источники одного вида: либо типа разности потенциалов, либо типа тока. Источники разности потенциалов зависят от потока через источник в другой подсистеме (рис. 12, а), источники потока зависят от разности потенциалов на источнике в другой подсистеме (рис. 12, б). Такой вид связи характерен при взаимодействии механической и гидравлической или пневматической подсистем.

Рис. 12. Схема гираторного типа связи.
Пример гираторного типа связи
На рис. 13, а изображен гидроцилиндр (совокупность гидравлической и пневматической подсистем), а на рис. 13, б - его эквивалентная схема.


Рис. 13. Схематичное изображение гидроцилиндра (а) и его эквивалентная схема (б).
Гидравлическая система на эквивалентной схеме представлена источником давления Р, который через трубопровод (элементы R1 и L1) нагнетает жидкость в переменную емкость C1, механическая подсистема представлена источником усилия F2, который, преодолевая трение штока о стенки, через упругий шток UP1 передвигает поршень массой m1, имеющий трение R2 о стенки цилиндра.
Воздействие на гидравлическую подсистему со стороны механической учитывается источником расхода G, который зависит от скорости движения поршня, т. е.  при
при  , где S - площадь поперечного сечения поршня;
, где S - площадь поперечного сечения поршня;  - плотность жидкости; V - скорость движения поршня (потенциал механической подсистемы).
- плотность жидкости; V - скорость движения поршня (потенциал механической подсистемы).
Источник силы F1 учитывает воздействие гидравлической подсистемы на механическую:  при
при  , где Р - давление в емкости C1 (потенциал гидравлической подсистемы).
, где Р - давление в емкости C1 (потенциал гидравлической подсистемы).
Выбор схемы связи (рис. 12, а или 12, б) выполняют так же, как и для трансформаторной связи.
Примечание. Трансформаторная и гираторная связи устанавливают взаимодействие подсистемы по двум парам фазовых переменных. В последнем примере неверной будет такая связь: в гидравлической подсистеме зависимый источник расхода  , а в механической - зависимый источник скорости
, а в механической - зависимый источник скорости  . В этом случае было бы установлено соответствие только между фазовыми переменными одной пары.
. В этом случае было бы установлено соответствие только между фазовыми переменными одной пары.
3) через зависимые параметры элементов.
Связь через зависимые параметры элементов характерна при взаимодействии с тепловой подсистемой. В зависимости от значений температуры меняются параметры элементов взаимодействующей подсистемы, например вязкость жидкости, значение сопротивления резистора. Обратное влияние на тепловую подсистему учитывается введением в эквивалентную схему тепловой подсистемы зависимых источников теплового потока. При отсутствии массопереноса значение источника определяется мощностью, выделяемой элементом; при наличии массопереноса - переносимой массой.
В случае моделирования влияния температуры на работу технических объектов без учета обратного воздействия предполагают, как будет изменяться температура во времени, и переносят эту зависимость на параметры элементов объекта, т. е. делают параметры зависимыми от времени. Аналогично моделируют старение элементов объекта при расчетах надежности.
ЭЛЕМЕНТЫ ТЕОРИИ ГРАФОВ
Топологические уравнения подсистем записываются для узлов и контуров эквивалентной схемы, поэтому получение эквивалентной схемы - необходимый этап… На рис. 1, а представлен пример связного графа, а на рис. 1, б - его… Выбор фундаментального дерева графа не однозначен, для одного и того же графа их может быть несколько. Так, на рис. 1,…Метод получения топологических уравнений на основе матрицы контуров и сечений
Метод, основанный на использовании информации, заключенной в М-матрице (в матрице контуров и сечений), - наиболее удобный и общий метод получения… М-матрица строится на основании ориентированного графа эквивалентной схемы и… Процедура формирования М-матрицы заключается в следующем: каждая хорда графа поочередно включается в дерево, при этом…Обобщенный метод получения математических моделей систем
Обобщенная ММС может быть представлена в виде системы уравнений: (3)Табличный метод получения математических моделей систем
Рассмотрим алгебраизацию компонентных уравнении использовании неявной формулы Эйлера для уравнений элемента типа С: Подставляя , получим алгебраизованное компонентное уравнение элемента типа С:Узловой метод получения математических моделей систем
(7), где - вектор переменных, величин типа потенциала, характеризующих состояние… Топологические уравнения типа (7) могут быть получены с помощью матрицы инциденций А:Метод переменных состояния
В этом методе предварительная алгебраизация компонентных уравнений не требуется, поэтому при программной реализаций метода библиотека ММ элементов… Отличительная особенность метода - возможность получения системы… Разрешив ММС относительно и UL, а затем выполнив деление частей уравнений на С или L, получим систему уравнений в…МАТЕМАТИЧЕСКИЕ МОДЕЛИ ТЕХНИЧЕСКИХ ОБЪЕКТОВ ДЛЯ ПОЛУЧЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Получение АЧХ и ФЧХ возможно на основе уравнений, сформированных для анализа объекта во временной области, т. е. ММС в виде системы дифференциальных…Численный метод анализа частотных характеристик
(1) где V - вектор приращений переменных состояния относительно значений этих… Учитываем, что , и применяем преобразование Лапласа к (1):Метод полиномиальных коэффициентов
Применяя преобразование Лапласа и учитывая (2), получим , где - матрицы передаточных функций объекта.Символический метод
Численный метод может быть реализован не только для объектов, описываемых системой уравнений в нормальной форме Коши, как это было показано для (1).… Компонентные уравнения для простейших элементов типа R, С, соответственно ; ;…МЕТОДЫ АНАЛИЗА ПОВЫШЕННОЙ ЭФФЕКТИВНОСТИ
Одновариантный анализ служит для оценки выходных параметров объектов при заданных внутренних и внешних параметрах. Он является необходимой составной… Направления повышения эффективности одновариантного анализа связаны с учетом… 1. разработка специальных методов и алгоритмов, рассчитанных на ограниченный класс объектов проектирования;Диакоптические методы анализа
Разбиению системы уравнений на подсистемы соответствует разбиение исследуемого объекта на части, что обычно осуществляет инженер-проектировщик,… Отличительная особенность диакоптических методов анализа - возможность… а) серии исключений неизвестных при решении ЛАУ методом Гаусса;– Конец работы –
Используемые теги: Математическое, моделирование, технических, объектов0.077
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.194 сек.
Новости и инфо для студентов